一种电动机转子动平衡监测系统的制作方法
本发明涉及动平衡监测,特别涉及一种电动机转子动平衡监测系统。
背景技术:
1、电动机转子由于材质不均匀或毛坏缺陷、加工及装配中产生的误差,其至设计时就且有非对称的,但形状等多种因素,使得转子在旋转时,其上每个微小质点产生的离心惯性力不能相与抵消,离心惯性力通讨轴承作用到机械及其其础上,引起振动,产生了噪音,加速轴承摩捐,缩短了机械寿命,严重时能造成破坏性事故。为此,必须对转子进行平衡,使其达到允许的平衡精度等级,或使因此产生的机械振动幅度降在允许的范围内。进而亟需能够对电动机转子动平衡进行有效准确监测的系统。
技术实现思路
1、为解决上述现有技术中所存在的问题,本发明提供一种电动机转子动平衡监测系统,能够对电动机转子动平衡进行准确且有效的监测。
2、为了实现上述技术目的,本发明提供了如下技术方案:一种电动机转子动平衡监测系统,包括:
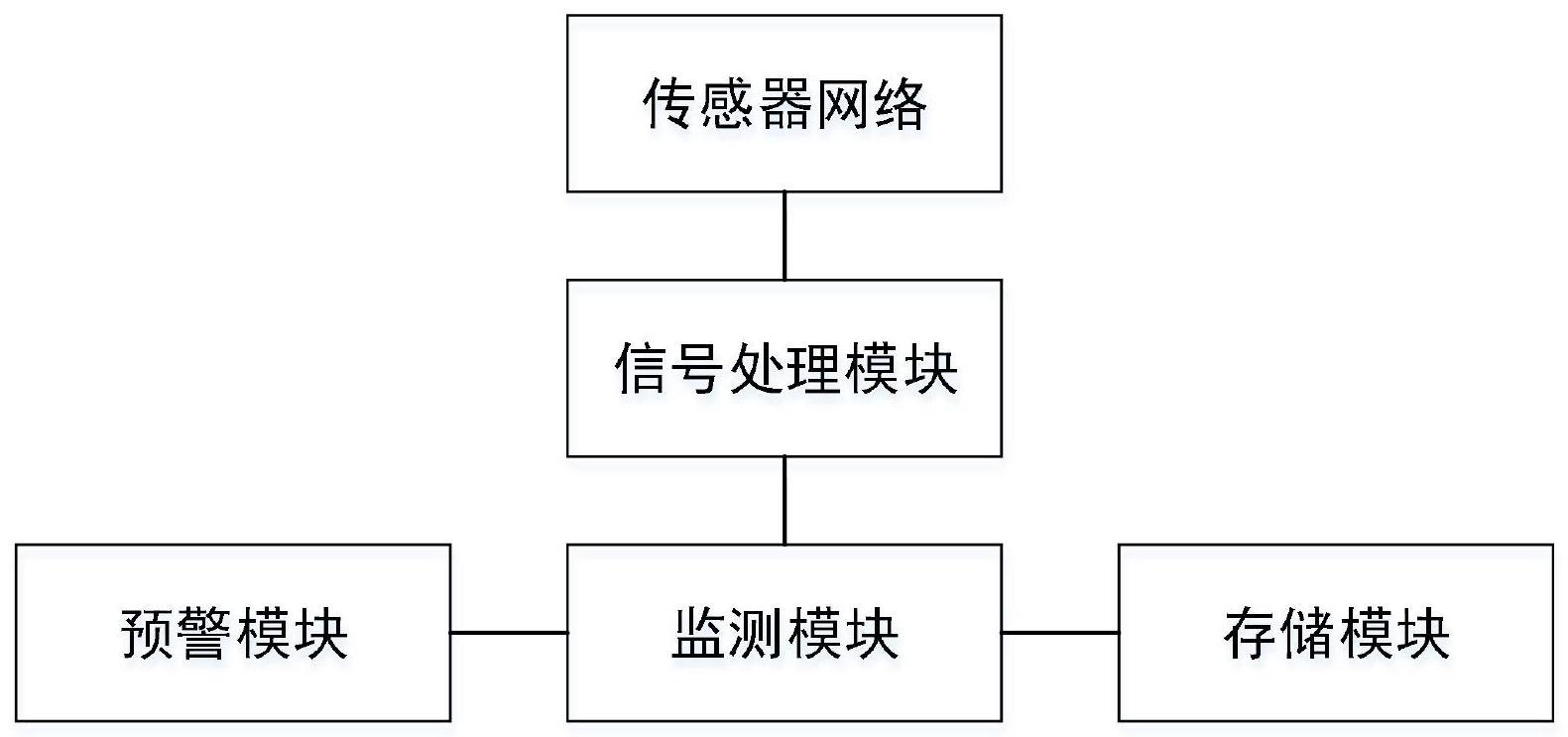
3、传感器网络、信号处理模块、监测模块;其中所述传感器网络、信号处理模块及监测模块依次连接;
4、通过传感器网络采集电动机转子的振动信号和基准信号;
5、通过信号处理模块对振动信号进行滤波及特征提取,得到振动信号对应的幅值与相位,并根据基准信号生成转速信息;
6、通过监测模块采用集成学习模型对幅值、相位及转速信息进行处理,生成电动机转子动平衡量的大小和位置。
7、可选的,所述传感器网络包括振动传感器和霍尔传感器,其中所述霍尔传感器采用光电传感器。
8、可选的,在所述信号处理模块中,通过带通滤波器和整周期截断dft法对对振动信号进行滤波及特征提取。
9、可选的,在所述监测模块中,集成学习模型包括第一层模型和第二层模型,其中所述第一层模型和第二层模型通过堆叠集成策略及加权均值融合方法进行融合;其中所述第一层模型和第二层模型采用机器学习模型。
10、可选的,在所述监测模块中,构建若干个机器学习模型,通过迁移学习的方式对若干个机器学习模型进行训练,并对训练后的机器学习模型进行验证,根据第一次验证结果对训练后的机器学习模型进行筛选,生成第一层模型;
11、根据第一层模型的输出,对若干个机器学习模型进行训练及验证,并根据第二次验证结果对训练后的机器学习模型进行筛选,生成第二层模型。
12、可选的,还包括预警模块,其中所述预警模块与所述监测模块连接,通过预警模块对所述电动机转子动平衡量的大小进行阈值判断,并根据阈值判断结果进行报警。
13、可选的,还包括存储模块,其中所述存储模块与所述监测模块连接;所述存储模块用于对监测模块中的集成学习模型及数据进行存储。
14、可选的,在所述存储模块中,分别通过模型库及数据库对集成学习模型及数据进行存储,其中所述模型库及数据库均采用树形存储结构。
15、可选的,机器学习模型包括随机森林回归模型,梯度提升模型,支持向量回归模型、极端梯度提升模型和自适应提升模型。
16、可选的,所述第一层模型包括随机森林回归模型和极端梯度提升模型,第二层模型采用支持向量回归模型,支持向量回归模型采用rbf函数。
17、本发明具有如下技术效果:
18、本发明通过上述技术方案,通过传感器网络对电动机转子的相关振动信号和基准信号进行信号采集,信号采集完成后,通过信号处理模块对采集的信号进行关键信息的提取,通过监测模块对提取的信息采用集成学习模型进行处理,处理生成不平衡量的大小和位置,能够提升不平衡量相关数据的测量精度,同时通过存储模块对上述内容进行相关存储,方便模型的调用和相关人员对于电动机转子不同方面的数据查看及溯源,具有较强的实用性。
技术特征:
1.一种电动机转子动平衡监测系统,其特征在于,包括:
2.根据权利要求1所述的电动机转子动平衡监测系统,其特征在于:
3.根据权利要求1所述的电动机转子动平衡监测系统,其特征在于:
4.根据权利要求1所述的电动机转子动平衡监测系统,其特征在于:
5.根据权利要求1所述的电动机转子动平衡监测系统,其特征在于:
6.根据权利要求1所述的电动机转子动平衡监测系统,其特征在于:
7.根据权利要求1所述的电动机转子动平衡监测系统,其特征在于:
8.根据权利要求7所述的电动机转子动平衡监测系统,其特征在于:
9.根据权利要求5所述的电动机转子动平衡监测系统,其特征在于:
10.根据权利要求5所述的电动机转子动平衡监测系统,其特征在于:
技术总结
本发明公开一种电动机转子动平衡监测系统,包括,传感器网络、信号处理模块、监测模块;其中所述传感器网络、信号处理模块及监测模块依次连接;通过传感器网络采集电动机转子的振动信号和基准信号;通过信号处理模块对振动信号进行滤波及特征提取,得到振动信号对应的幅值与相位,并根据基准信号生成转速信息;通过监测模块采用集成学习模型对幅值、相位及转速信息进行处理,生成电动机转子动平衡量的大小和位置。
技术研发人员:李清升,王巍,梁海超,吴海涛,郭吉祥,杨建玉,孙博霖,赵大伟,武浩然,李凤霞,柳彦旭,叶剑峰
受保护的技术使用者:大唐锡林郭勒风力发电有限责任公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!