基于XPNAV和INS组合的航天器导航方法
本发明属于航天器自主导航,涉及一种航天器导航方法,具体涉及一种基于x射线脉冲星导航xpnav和惯性导航ins组合的航天器导航方法,可用于对航天器的定位。
背景技术:
1、航天器导航指结合航天器的初始位置和速度,最终通过导航算法计算得到每一个时刻航天器的位置和速度。
2、航天器导航分为基于x射线脉冲星导航的方法、基于惯性导航的方法和基于x射线脉冲星导航和惯性导航组合的方法,其中基于x射线脉冲星导航的方法,首先在某个脉冲星观测时段内,通过航天器上的x射线探测器获取到x射线脉冲光子到达时间,同时将光子到达时间转换到太阳系质心处;其次,通过历元折叠的方法获得观测脉冲轮廓;再次,对比观测脉冲轮廓和标准脉冲轮廓,得到脉冲到达时间差作为导航观测量。最后,通过卡尔曼滤波算法求解由脉冲到达时间差得到的观测方程,获得航天器的位置和速度。但是因为脉冲到达时间差的估计精度不高,导致x射线脉冲星导航的精度不高。基于惯性导航的方法,首先利用惯性传感器测量航天器的加速度和角速度信息,再通过一系列的积分投影运算得到航天器的位置和速度。惯性导航随着时间的延长,导航误差随时间累积增长,最终导致惯性导航精度不高。
3、基于x射线脉冲星导航和惯性导航组合的方法,利用x射线脉冲星导航得到的位置与惯性导航得到的位置的差分作为导航观测量,得到观测方程,再通过卡尔曼滤波器,获得航天器位置和速度。解决了惯性导航误差随时间累积增长的问题,提高了导航精度。但因为选择位置的差分作为导航观测量,位置信息已经经过了卡尔曼滤波处理,该方法存在测量噪声不满足高斯白噪声的问题,限制了导航精度的进一步提升。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,提出一种基于xpnav和ins组合的航天器导航方法,用于解决现有技术中存在的因测量噪声不满足高斯白噪声导致的导航精度较低的技术问题。
2、为实现上述目的,本发明采取的技术方案包括如下步骤:
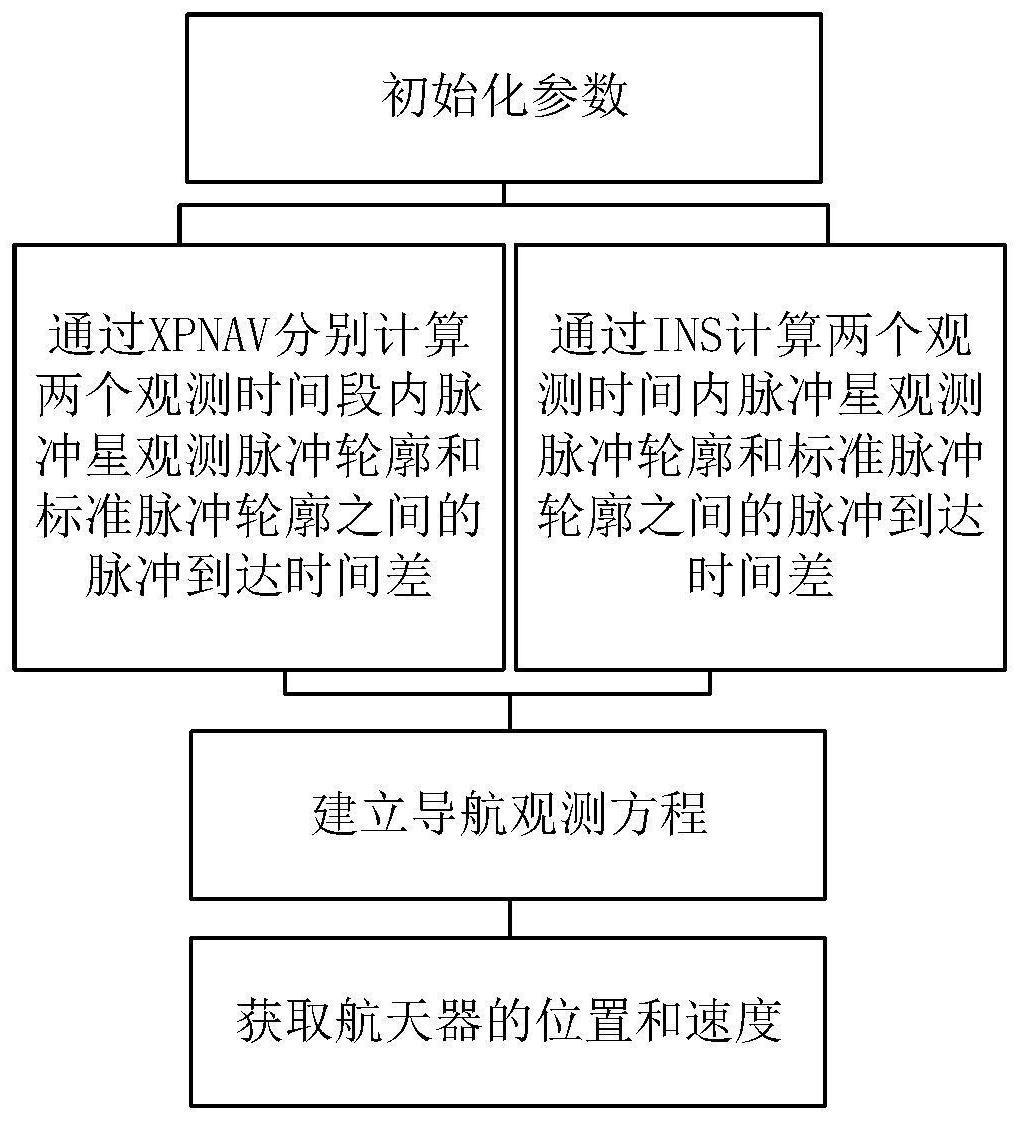
3、(1)初始化参数:
4、初始化连续的两个观测时间段[k-2,k-1]、[k-1,k]内航天器所探测到的i个、j个x射线脉冲星光子到达自身的时间序列分别为其中,k表示当前观测时刻,i≥104,j≥104,ti和tj分别表示第i个和第j个x射线脉冲星光子到达航天器的时刻;
5、(2)通过x射线脉冲星导航xpnav分别计算两个观测时间段内脉冲星观测脉冲轮廓和标准脉冲轮廓之间的脉冲到达时间差:
6、通过时间序列计算x射线脉冲星光子到达太阳系质心的时间序列并根据脉冲星星历的自转频率参数计算所对应的相位序列再通过获得的第q个整数相位的第m个bin块内的光子数cq(m)、dq(m)计算观测脉冲轮廓sk-1(m)、sk(m),然后计算sk-1(m)、sk(m)与脉冲星的标准脉冲轮廓b(m)之间的脉冲到达时间差其中,q∈[1,q]、m∈[1,m],m表示bin块数,q表示脉冲星相位周期数;
7、(3)通过惯性导航系统计算两个观测时间内脉冲星观测脉冲轮廓和标准脉冲轮廓之间的脉冲到达时间差:
8、利用惯性导航系统输出的航天器k-1时刻的位置和k时刻的位置分别计算观测时间[k-2,k-1]和[k-1,k]的脉冲星观测脉冲轮廓和标准脉冲轮廓之间的脉冲到达时间差和
9、(4)建立导航观测方程:
10、通过步骤(2)和(3)计算的和和计算k时刻的导航观测量zk;通过x射线脉冲星导航的位置误差δrxp和速度误差δvxp计算k时刻的观测噪声vk,通过x射线脉冲星方向矢量n构建观测方程的观测矩阵h,并建立关于包含惯性导航的位置误差δrins和速度误差δvins的导航状态量xk的导航观测方程:
11、zk=hxk+vk;
12、(5)获取航天器的位置和速度:
13、对导航观测方程进行求解,并将求解得到的导航状态量xk进行卡尔曼滤波,获得更新后的k时刻惯性导航的位置误差和速度误差再通过惯性导航系统输出的航天器k时刻的位置和速度及位置误差和速度误差计算导航航天器k时刻的位置rk和速度vk。
14、本发明与现有技术相比,具有以下优点:
15、本发明使用脉冲星导航系统估计的脉冲到达时间差和惯性导航系统推算的脉冲到达时间差的差分作为组合导航观测量,避免了现有技术利用x射线脉冲星导航得到的位置与惯性导航得到的位置的差分作为导航观测量对求解导航观测方程以获取航天器的位置和速度时测量噪声不满足高斯白噪声的影响,有效提高了导航精度。
技术特征:
1.一种基于xpnav和ins组合的航天器导航方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的方法,其特征在于,步骤(2)中所述的x射线脉冲星光子到达太阳系质心的时间序列计算公式分别为:
3.根据权利要求1所述的方法,其特征在于,步骤(2)中所述的相位序列计算公式分别为:
4.根据权利要求1所述的方法,其特征在于,步骤(2)中所述的脉冲星的观测脉冲轮廓sk-1(m)、sk(m),计算公式分别为:
5.根据权利要求1所述的方法,其特征在于,步骤(2)中所述的观测脉冲轮廓sk-1(m)、sk(m)与标准脉冲轮廓b(m)之间的脉冲到达时间差计算公式分别为:
6.根据权利要求1所述的方法,其特征在于,步骤(3)中所述的两个观测时间内的脉冲到达时间差和计算公式分别为:
7.根据权利要求1所述的方法,其特征在于,步骤(4)中所述的k时刻的导航观测量zk、观测噪声vk,计算公式分别为:
8.根据权利要求1所述的方法,其特征在于,步骤(4)中所述的观测矩阵h、导航状态量xk,其表达式为:
9.根据权利要求1所述的方法,其特征在于,步骤(5)中所述的更新后的k时刻惯性导航的位置误差和速度误差计算公式为:
10.根据权利要求1所述的方法,其特征在于,步骤(5)中所述的组合导航航天器k时刻的位置rk和速度vk,计算公式为:
技术总结
本发明提出了一种XPNAV和INS组合的航天器导航方法,实现步骤为:(1)初始化参数;(2)分别计算两个观测时间段内脉冲星观测脉冲轮廓和标准脉冲轮廓之间的脉冲到达时间差;(3)通过惯性导航系统计算两个观测时间内脉冲星观测脉冲轮廓和标准脉冲轮廓之间的脉冲到达时间差;(4)建立导航观测方程;(5)获取航天器的位置和速度。本发明使用脉冲星导航系统估计的脉冲到达时间差和惯性导航系统推算的脉冲到达时间差的差分作为组合导航观测量,避免了现有技术利用X射线脉冲星导航得到的位置与惯性导航得到的位置的差分作为导航观测量对求解导航观测方程以获取航天器的位置和速度时测量噪声不满足高斯白噪声的影响,有效提高了导航精度。
技术研发人员:方海燕,李小平,井金牛,张泽葳,张魁,孙泽阳,冀洋,李锦,宋雨凤
受保护的技术使用者:西安电子科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!