一种雷达目标跟踪航迹起始方法、装置、设备及介质与流程
本发明涉及雷达数据处理,尤其涉及一种雷达目标跟踪航迹起始方法、装置、设备及介质。
背景技术:
1、航迹起始是目标跟踪技术的首要问题也是关键部分,在毫米波雷达的多目标检测场景中起着至关重要的作用。其目的是希望目标进入雷达监视区域之后能尽快建立目标航迹,且要避免虚假点迹过多而造成虚假航迹的出现。从工程实现来看,航迹起始是根据传感器测量值建立初始航迹并判断航迹是否源于一个真实目标的过程。由于目前毫米波雷达应用场景日趋复杂,更多杂波的嘈杂环境干扰,以及有限的先验知识,雷达传感器量测的不确定性为航迹起始带来了更大的难度和误差。
2、航迹起始方法按照其数据处理方式的不同,可以分为顺序处理技术和批处理技术两大类,而顺序处理技术代表性的算法有直观法、逻辑法等,顺序处理技术具有较低的计算量,适用于背景杂波较弱的情况。直观法的处理思想是,通过目标最大速度等信息建立关联波门,若连续n次扫描中超过m次量测数据落入关联波门内,则建立目标航迹。现有雷达航迹起始方法主要包含两大类,直观法和逻辑法。直观法在弱杂波的安静环境中具有计算量小的显著优势,基于物体运动规律,在波门中通过速度和加速度的大小限制关联目标,具有起始快的优点。但缺点也很明显,在强杂波的嘈杂环境中,仅限制速度和加速度的量测关联会出现冗余的现象,降低数据关联正确率。逻辑法的处理思想是,初始关联波门通过目标最大速度等信息建立,后续的关联波门通过航迹预测外推得到,最后若连续n次扫描中超过m次存在量测数据落入关联波门内,则建立目标航迹。逻辑法则通过预测目标下一时刻的状态及波门限制来判断航迹起始,具有较好的鲁棒性,但强杂波环境下逻辑法的计算量非常大,对航迹起始同样有效率低的缺点。
技术实现思路
1、技术目的:针对现有技术中嘈杂环境下无法快速确认航迹起始的缺陷,本发明公开了一种雷达目标跟踪航迹起始方法、装置、设备及介质,通过对雷达量测数据提取量测样本特征,根据训练后的深度学习神经网络模型得到分类标签,快速准确的确认航迹起始。
2、技术方案:为实现上述技术目的,本发明采用以下技术方案。
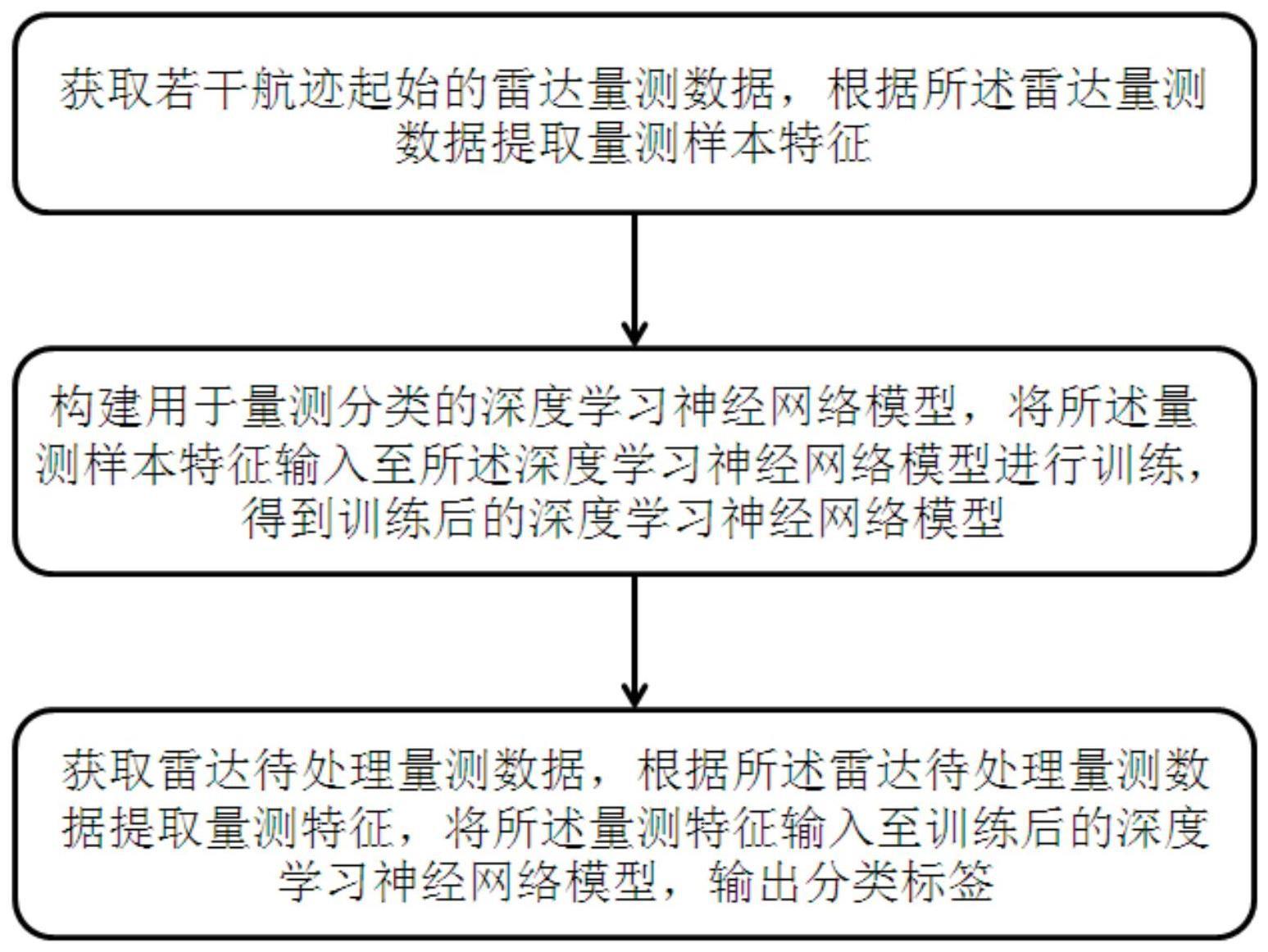
3、一种雷达目标跟踪航迹起始方法,包括:
4、获取航迹起始的雷达量测数据,根据所述雷达量测数据提取量测样本特征;
5、构建用于量测分类的深度学习神经网络模型,所述深度学习神经网络模型中引入自相关权重提取特征内部的相关性,将所述量测样本特征输入至所述深度学习神经网络模型进行训练,得到训练后的深度学习神经网络模型;
6、获取雷达待处理量测数据,根据所述雷达待处理量测数据提取量测特征,将所述量测特征输入至训练后的深度学习神经网络模型,输出分类标签。
7、优选地,所述获取航迹起始的雷达量测数据,包括:确定航迹起始帧数,根据所述航迹起始帧数获取雷达检测的数据样本,所述数据样本包括标签分类。
8、优选地,所述构建用于量测分类的深度学习神经网络模型包括:卷积神经网络模块、全连接特征感知模块和分类器模块;所述卷积神经网络模块的输入和全连接特征感知模块的输入为量测样本特征,所述分类器模块的输入为卷积神经网络模块的输出和全连接特征感知模块的输出,所述分类器模块输出分类标签。
9、优选地,所述卷积神经网络模块的输入为量测样本特征中的空间特征向量,所述全连接特征感知模块的输入为量测样本特征中的时序特征向量,所述时序特征向量包括速度信息和加速度信息,所述空间特征向量包括航向角信息和偏航角信息。
10、优选地,所述卷积神经网络模块中引入残差结构,用于空间特征向量的输出补充信息量。
11、优选地,所述全连接特征感知模块包括依次连接的全连接模块、一维卷积、神经元、激活层、平均池化层、add层,其中全连接模块的输出与add层的输入连接;所述神经元中引入代表时间特征向量内部关联的自相关权重,自相关权重根据输入的维度构建自相关权重矩阵,并在模型训练过程中迭代更新。
12、优选地,所述全连接模块包括依次连接的flatten摊平向量、线性层1、sigmoid函数、线性层2,所述线性层1和线性层2中包括多个神经元,下一层神经元对上一层神经元进行一次求和计算。
13、一种雷达目标跟踪航迹起始装置,包括数据获取模块和数据处理模块,所述数据获取模块用于获取航迹起始的雷达量测数据,根据所述雷达量测数据提取量测样本特征,以及获取雷达待处理量测数据,根据所述雷达待处理量测数据提取量测特征,所述量测样本特征用于训练深度学习神经网络模型,所述数据处理模块包括训练后的深度学习神经网络模型,所述深度学习神经网络模型中引入自相关权重提取特征内部的相关性,所述训练后的深度学习神经网络模型用于根据输入的量测特征输出分类标签,得到航迹起始结果。
14、一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现以上任一所述的一种雷达目标跟踪航迹起始方法。
15、一种计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行以上任一所述的一种雷达目标跟踪航迹起始方法。
16、有益效果:本发明通过对雷达量测数据提取量测样本特征,根据训练后的深度学习神经网络模型得到分类标签,快速准确的确认航迹起始,本发明将航迹起始的量测关联问题转化为真实与虚假量测的二分类问题,以完成在嘈杂环境下快速准确确认航迹起始的优化目标,摆脱传统航迹起始方法中对目标运动模型以及噪声密度等先验信息的依赖。
技术特征:
1.一种雷达目标跟踪航迹起始方法,其特征在于,包括:
2.根据权利要求1所述的一种雷达目标跟踪航迹起始方法,其特征在于:所述获取航迹起始的雷达量测数据,包括:确定航迹起始帧数,根据所述航迹起始帧数获取雷达检测的数据样本,所述数据样本包括标签分类。
3.根据权利要求1所述的一种雷达目标跟踪航迹起始方法,其特征在于:所述构建用于量测分类的深度学习神经网络模型包括:卷积神经网络模块、全连接特征感知模块和分类器模块;所述卷积神经网络模块的输入和全连接特征感知模块的输入为量测样本特征,所述分类器模块的输入为卷积神经网络模块的输出和全连接特征感知模块的输出,所述分类器模块输出分类标签。
4.根据权利要求3所述的一种雷达目标跟踪航迹起始方法,其特征在于:所述卷积神经网络模块的输入为量测样本特征中的空间特征向量,所述全连接特征感知模块的输入为量测样本特征中的时序特征向量,所述时序特征向量包括速度信息和加速度信息,所述空间特征向量包括航向角信息和偏航角信息。
5.根据权利要求3所述的一种雷达目标跟踪航迹起始方法,其特征在于:所述卷积神经网络模块中引入残差结构,用于空间特征向量的输出补充信息量。
6.根据权利要求3所述的一种雷达目标跟踪航迹起始方法,其特征在于:所述全连接特征感知模块包括依次连接的全连接模块、一维卷积、神经元、激活层、平均池化层、add层,其中全连接模块的输出与add层的输入连接;所述神经元中引入代表时间特征向量内部关联的自相关权重,自相关权重根据输入的维度构建自相关权重矩阵,并在模型训练过程中迭代更新。
7.根据权利要求6所述的一种雷达目标跟踪航迹起始方法,其特征在于:所述全连接模块包括依次连接的flatten摊平向量、线性层1、sigmoid函数、线性层2,所述线性层1和线性层2中包括多个神经元,下一层神经元对上一层神经元进行一次求和计算。
8.一种雷达目标跟踪航迹起始装置,其特征在于,包括数据获取模块和数据处理模块,所述数据获取模块用于获取航迹起始的雷达量测数据,根据所述雷达量测数据提取量测样本特征,以及获取雷达待处理量测数据,根据所述雷达待处理量测数据提取量测特征,所述量测样本特征用于训练深度学习神经网络模型,所述数据处理模块包括训练后的深度学习神经网络模型,所述深度学习神经网络模型中引入自相关权重提取特征内部的相关性,所述训练后的深度学习神经网络模型用于根据输入的量测特征输出分类标签,得到航迹起始结果。
9.一种电子设备,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如权利要求1-7任一所述的一种雷达目标跟踪航迹起始方法。
10.一种计算机可读存储介质,其特征在于,存储有计算机可执行指令,所述计算机可执行指令用于执行如权利要求1-7任一所述的一种雷达目标跟踪航迹起始方法。
技术总结
本发明公开了一种雷达目标跟踪航迹起始方法、装置、设备及介质,包括获取航迹起始的雷达量测数据,根据所述雷达量测数据提取量测样本特征;构建用于量测分类的深度学习神经网络模型,将所述量测样本特征输入至所述深度学习神经网络模型进行训练,得到训练后的深度学习神经网络模型;获取雷达待处理量测数据,根据所述雷达待处理量测数据提取量测特征,将所述量测特征输入至训练后的深度学习神经网络模型,输出分类标签。本发明通过对雷达量测数据提取量测样本特征,根据训练后的深度学习神经网络模型得到分类标签,快速准确的确认航迹起始,摆脱传统航迹起始方法中对目标运动模型以及噪声密度等先验信息的依赖。
技术研发人员:张军,顾超,王长冬,郑浩,许孝勇
受保护的技术使用者:南京慧尔视智能科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!