一种基于径向基函数网络的双雷达测速方法与流程
本发明涉及交通雷达,尤其涉及一种基于径向基函数网络的双雷达测速方法。
背景技术:
1、随着现代交通运输的快速发展,轨道列车作为一种高效、快速、环保的交通工具,在城市间的连接和人员运输方面起着至关重要的作用。为了确保列车的安全、高效运行,测速系统作为轨道列车行驶控制的重要组成部分扮演着关键角色。测速系统能够实时准确地监测列车的速度,为列车的自动控制、制动和安全保护提供重要的依据。
2、在过去的几十年中,随着轨道列车运行速度的不断提升,对测速系统的精确性和可靠性要求也越来越高。然而,目前的多普勒测速雷达系统在实际应用中仍然存在一些限制。传统的测速方法主要依赖于使用雷达多普勒效应来计算列车的速度,容易受到列车颠簸和地形变化的影响,导致无法提供足够精确的测速结果。
3、这里的陈述仅提供与本发明有关的背景技术,而并不必然地构成现有技术。
技术实现思路
1、本发明的目的在于提供一种基于径向基函数网络的双雷达测速方法,显著提高了测速的精确性和稳定性。
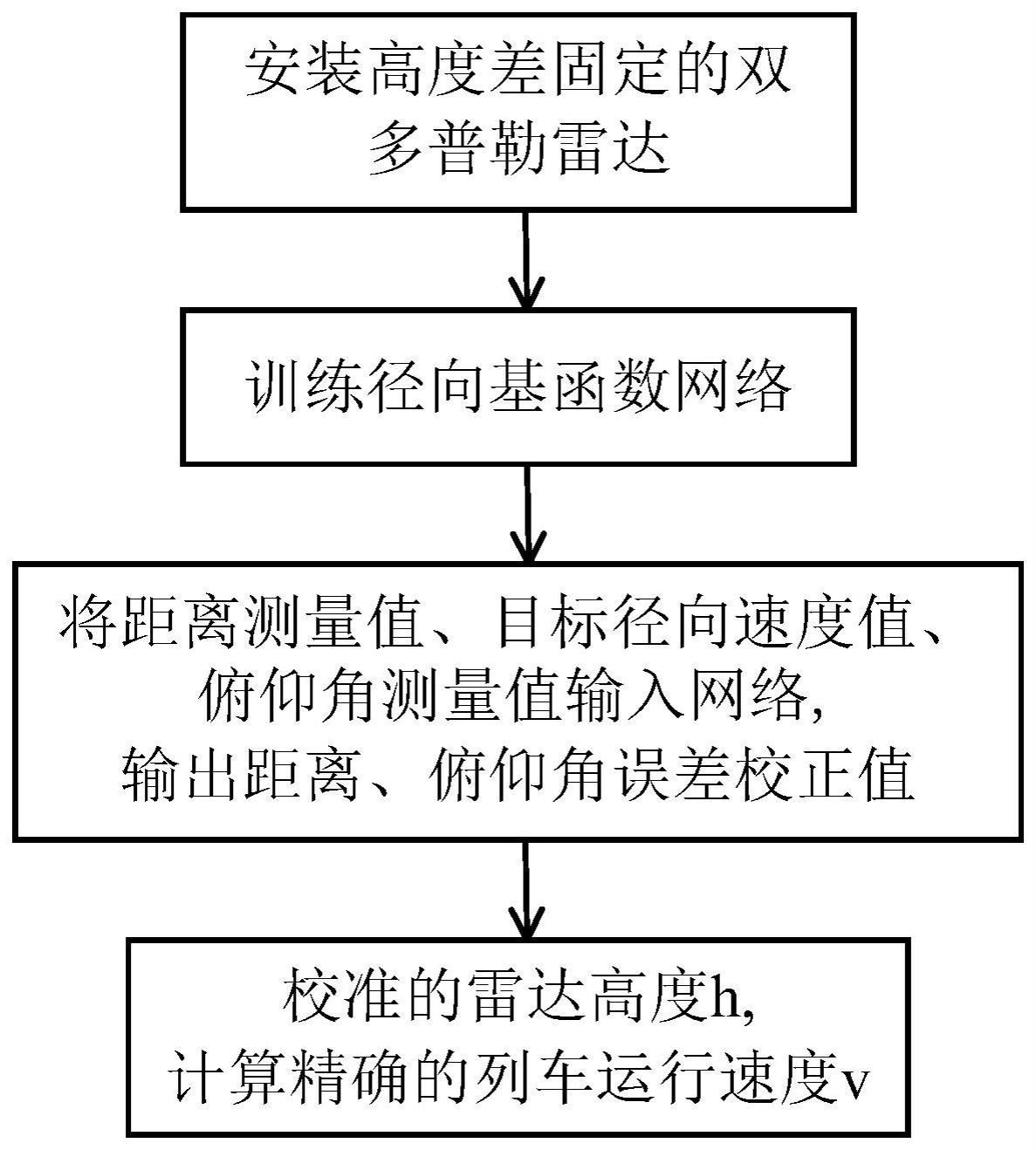
2、为了达到上述目的,本发明提供一种基于径向基函数网络的双雷达测速方法,采用具有固定高度差的两个雷达分别独立采集列车运行数据,将采集到的距离测量值r、目标径向速度值vd以及俯仰角测量值e输入训练好的径向基函数网络,径向基函数网络输出测量距离误差的补偿值δr和俯仰角的补偿值δe,利用补偿值来校正距离和俯仰角的测量值,得到校正后的距离值r'和俯仰角值e',根据校正后的距离值r'进行雷达高度h的校准,利用校正后的距离值r'和校准后的雷达高度h计算得到精确的列车运行速度v。
3、将两个多普勒雷达固定在特定的支架上,并将固定好的支架安装到列车底部,设置它们的波束擦地角分别为θ1和θ2,两个雷达的天线中心之间保持固定的差距为δh。
4、使用样本训练集数据来训练径向基函数网络,将距离测量值r、目标径向速度值vd、俯仰角测量值e作为神经网络的输入,并将雷达距离测量值误差、俯仰角测量值误差作为训练的输出,通过调整径向基函数网络的参数和权重,使其逐渐收敛。
5、选取某雷达的实测数据作为训练径向基函数网络所的样本数据集,将数据集随机划分为训练集、验证集以及测试集三部分,其中训练集占总数据量比例70%,测试集占20%,验证集占10%。
6、所述径向基函数网络的隐含层基函数φ为高斯函数:
7、
8、其中,φ表示径向基函数,x表示输入特征向量,c表示径向基函数的中心值参数;距离测量值、目标径向速度值和俯仰角测量值是三个输入特征向量x;使用k均值聚类对训练样本集进行聚类操作,通过对训练样本集进行迭代聚类,找到k个聚类中心,每个聚类中心对应一个径向基函数的中心值参数。
9、通过联立两个雷达修正后的距离测量值、目标径向速度与列车安装高度之间的关系,计算出雷达实际高度,并根据计算结果实时修正雷达安装高度,根据修正后的雷达安装高度,精确计算列车的运行速度;
10、雷达1和雷达2测量的列车速度分别为v1和v2;
11、
12、
13、其中,vd1和vd2分别为雷达1和雷达2测量的径向速度,r1'和r2'分别为校正后的雷达测量距离,h表示雷达1的高度值,δh表示雷达1和雷达2之间的高度差;
14、根据等式v1=v2,解算出列车高度的校准值h。
15、本发明能够准确预测和补偿测量误差,同时实时调整雷达安装高度以消除列车颠簸对测速结果的影响,具有高精度和可靠性,能够有效应对列车运行中的不确定因素,提高测速精度,为测速系统在轨道列车行驶控制中的应用提供了一种可行的解决方案,为保障列车安全、高效运行提供了有力支持,有望推动轨道交通行业的进一步发展和改善。
技术特征:
1.一种基于径向基函数网络的双雷达测速方法,其特征在于,采用具有固定高度差的两个雷达分别独立采集列车运行数据,将采集到的距离测量值r、目标径向速度值vd以及俯仰角测量值e输入训练好的径向基函数网络,径向基函数网络输出测量距离误差的补偿值δr和俯仰角的补偿值δe,利用补偿值来校正距离和俯仰角的测量值,得到校正后的距离值r'和俯仰角值e',根据校正后的距离值r'进行雷达高度h的校准,利用校正后的距离值r'和校准后的雷达高度h计算得到精确的列车运行速度v。
2.如权利要求1所述的基于径向基函数网络的双雷达测速方法,其特征在于,将两个多普勒雷达固定在特定的支架上,并将固定好的支架安装到列车底部,设置它们的波束擦地角分别为θ1和θ2,两个雷达的天线中心之间保持固定的差距为δh。
3.如权利要求2所述的基于径向基函数网络的双雷达测速方法,其特征在于,使用样本训练集数据来训练径向基函数网络,将距离测量值r、目标径向速度值vd、俯仰角测量值e作为神经网络的输入,并将雷达距离测量值误差、俯仰角测量值误差作为训练的输出,通过调整径向基函数网络的参数和权重,使其逐渐收敛。
4.如权利要求3所述的基于径向基函数网络的双雷达测速方法,其特征在于,选取某雷达的实测数据作为训练径向基函数网络所的样本数据集,将数据集随机划分为训练集、验证集以及测试集三部分,其中训练集占总数据量比例70%,测试集占20%,验证集占10%。
5.如权利要求4所述的基于径向基函数网络的双雷达测速方法,其特征在于,所述径向基函数网络的隐含层基函数φ为高斯函数:
6.如权利要求5所述的基于径向基函数网络的双雷达测速方法,其特征在于,通过联立两个雷达修正后的距离测量值、目标径向速度与列车安装高度之间的关系,计算出雷达实际高度,并根据计算结果实时修正雷达安装高度,根据修正后的雷达安装高度,精确计算列车的运行速度;
技术总结
一种基于径向基函数网络的双雷达测速方法,采用具有固定高度差的两个雷达分别独立采集列车运行数据,将采集到的距离测量值R、目标径向速度值v<supgt;d</supgt;以及俯仰角测量值E输入训练好的径向基函数网络,径向基函数网络输出测量距离误差的补偿值ΔR和俯仰角的补偿值ΔE,利用补偿值来校正距离和俯仰角的测量值,得到校正后的距离值R'和俯仰角值E',根据校正后的距离值R'进行雷达高度h的校准,利用校正后的距离值R'和校准后的雷达高度h计算得到精确的列车运行速度v。本发明显著提高了测速的精确性和稳定性。
技术研发人员:柯文雄,魏维伟,付朝伟,席光荣,李由之,尹洁珺,李小柳,郑成鑫,刘涛,王士铎
受保护的技术使用者:上海无线电设备研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!