一种基于激光雷达的空间量测方法及系统与流程
本发明涉及空间三维测量技术域,尤其涉及一种基于激光雷达的空间测量方法。
背景技术:
1、随着经济发展速度的加快,电力系统规模逐渐扩大,高压远距离架空输电线路日益增多,全国各地城市建设规模不断扩大,建设速度不断加快,据统计,违章行为所引发的外力破坏事故逐年上升,造成输电线路设备短路、倒杆、倒塔和停电等故障频发,国内外都发生过由于高压输电线路设施被盗而引发的电力系统瘫疾事故,这严重影响了线路的安全运行,增加了线路运行维护工作的难度。不仅给供电企业带来了巨额的损失,也对电网安全运行、人民生命财产构成了极大的威胁。为了保证电力系统的稳定运行,必须将电力设施保护工作提高到一个新的阶段,以快速检查输电线路,并对故障的输电线路进行恢复。
技术实现思路
1、本发明的目的是针对上述现有技术的不足,提出一种基于激光雷达的空间测量方法,能够提高识别输电线路上外破点的精确度,从而便于输电线路的检修和恢复。
2、本发明提供了一种基于激光雷达的空间量测方法,包括:
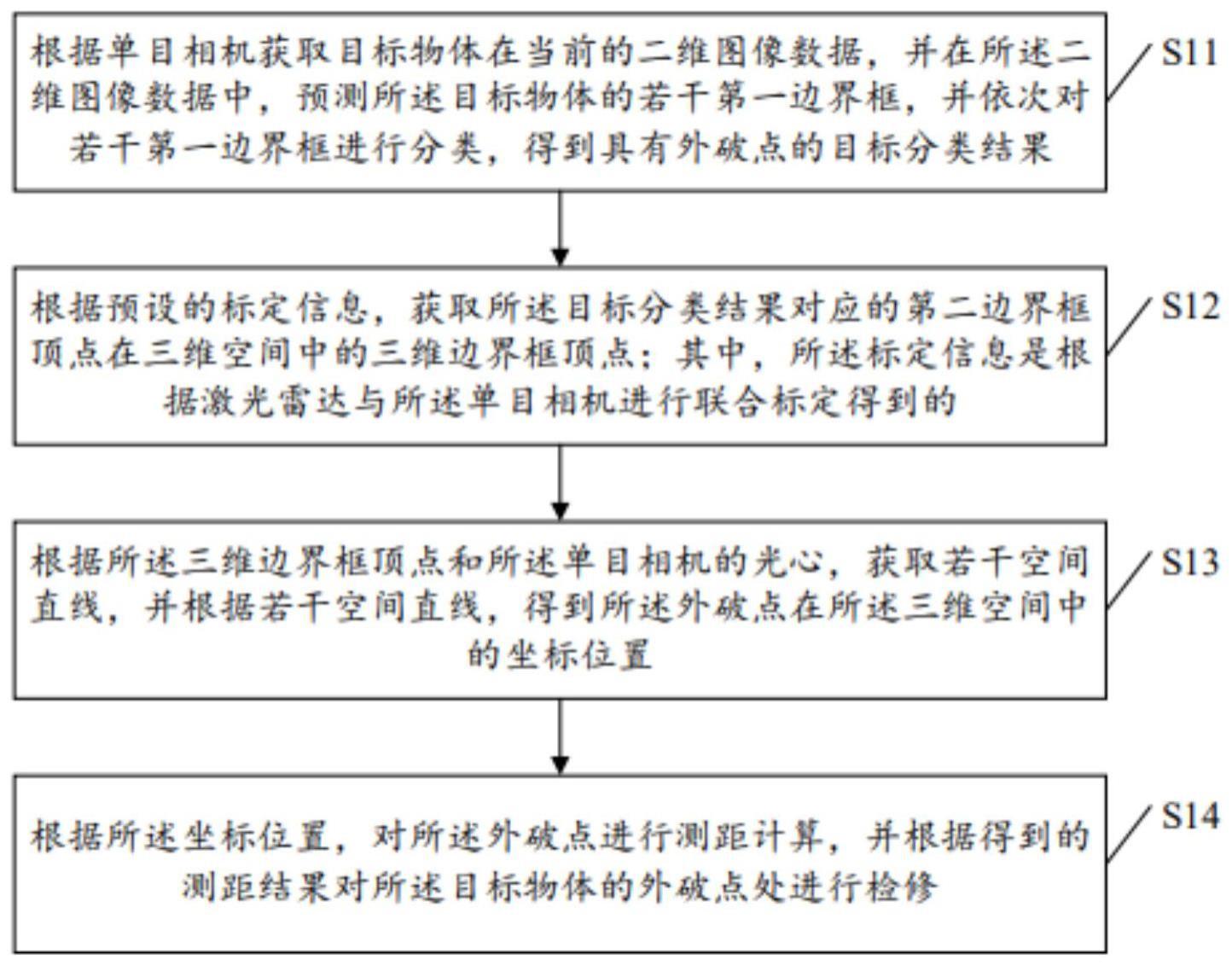
3、根据单目相机获取目标物体在当前的二维图像数据,并在所述二维图像数据中,预测所述目标物体的若干第一边界框,并依次对若干第一边界框进行分类,得到具有外破点的目标分类结果;
4、根据预设的标定信息,获取所述目标分类结果对应的第二边界框顶点在三维空间中的三维边界框顶点;其中,所述标定信息是根据激光雷达与所述单目相机进行联合标定得到的;
5、根据所述三维边界框顶点和所述单目相机的光心,获取若干空间直线,并根据若干空间直线,得到所述外破点在所述三维空间中的坐标位置;
6、根据所述坐标位置,对所述外破点进行测距计算,并根据得到的测距结果对所述目标物体的外破点处进行检修。
7、本发明采用通过单目相机获取图像数据和单目相机的光心,并根据激光雷达与所述单目相机进行联合标定得到的标定信息,构建若干空间直线,从而获取在二维图像上的外破点在三维点云数据中映射的坐标位置,将平面的外破点转换为由具有空间几何特征的空间直线进行表示,实现了在二维图像的外破点在三维空间坐标上的映射,能够便于基于图像的外破点在三维空间中的显示与对外破点进行精确定位,从而便于输电线路的检修和恢复。
8、进一步,所述根据预设的标定信息,获取所述目标分类结果对应的第二边界框顶点在三维空间中的三维边界框顶点,包括:
9、获取所述目标分类结果对应的第二边界框的若干边界框中点,并根据所述标定信息,分别获取所述边界框中点在所述三维空间中对应的三维边界框顶点;其中,所述边界框中点包括:上边界框中点和下边界框中点。
10、进一步,所述根据所述三维边界框顶点和所述单目相机的光心,获取若干空间直线,并根据若干空间直线,得到所述外破点在所述三维空间中的坐标位置,包括:
11、在所述三维空间中,作第一三维边界框顶点与所述单目相机的光心的第一空间直线;其中,所述第一三维边界框顶点是根据所述第二边界框顶点的上边界框中点得到的;
12、作第二三维边界框顶点与所述单目相机的光心的第二空间直线,并得到所述第二空间直线与三维空间地面相交的地面点;其中,所述第二三维边界框顶点是根据所述第二边界框顶点的下边界框中点得到的;
13、根据所述地面点和所述第一空间直线,得到所述外破点在三维点云数据中的坐标位置。
14、进一步,所述根据所述地面点和所述第一空间直线,得到所述外破点在三维点云数据中的坐标位置,包括:
15、由所述地面点作垂直于地面的垂线,将所述垂线与所述第一空间直线的交点作为外破点顶点,并将所述外破点顶点作为所述外破点在三维空间中的坐标位置。
16、进一步,所述标定信息是根据激光雷达与所述单目相机进行联合标定得到的,包括:
17、根据所述激光雷达获取历史点云数据,并对所述历史点云数据进行预处理后,依次获取所述历史点云数据中每个点的shot特征描述;其中,所述预处理包括:去噪、滤波和点云配;
18、依次获取所述二维图像数据的surf特征描述;其中,所述二维图像数据与所述历史点云数据的时间戳是同步的;
19、根据所述shot特征描述和surf特征描述,建立三维点云数据与二维图像数据的映射关系,并根据所述映射关系,得到标定信息。
20、进一步,所述根据所述shot特征描述和surf特征描述,建立三维点云数据与二维图像数据的映射关系,并根据所述映射关系,得到标定信息,包括:
21、根据特征的相似性,对所述shot特征描述和surf特征描述进行特征匹配,得到三维点云数据与二维图像数据的映射关系,根据所述映射关系,估计所述单目相机的姿态,并根据所述姿态,将所述历史点云数据与所述图像数据进行融合,得到所述标定信息。
22、本发明采用根据历史点云数据的特征和当前的二维图像数据的特征相似性,能够获取到图像点与三维空间点之间更加精确的映射关系,从而能够提供更准确的外破点定位结果,进而便于输电线路的检修和恢复,保障输电线路的安全。
23、进一步,所述将所述历史点云数据与所述图像数据进行融合,得到所述标定信息,包括:
24、将所述历史点云数据与所述图像数据进行融合,根据非线性优化算法,得到所述激光雷达与所述单目相机的转换矩阵,将所述转换矩阵作为标定信息。
25、进一步,所述在所述二维图像数据中,预测所述目标物体的若干第一边界框,包括:
26、将所述二维图像数据划分为若干个面积相同的网格,依次预测每个网格中若干第一边界框及第一边界框对应的置信度,并从若干第一边界框中筛选出置信度大于第一置信度阈值的若干第三边界框;
27、根据非极大值抑制算法,从若干第三边界框中剔除重叠边界框中置信度低于第二置信度阈值,得到所述目标物体的若干第一边界框。
28、进一步,所述依次预测每个网格中若干第一边界框及第一边界框对应的置信度,包括:
29、依次预测每个第一边界框的目标分类和所述第一边界框的坐标信息,分别得到对应的多维张量结果。
30、进一步,在所述分别得到对应的多维张量结果之后,依次对若干第一边界框进行分类,得到具有外破点的目标分类结果,包括:
31、根据目标分类的个数,依次从所述多维张量结果中提取对应第一边界框的目标分类信息;
32、根据预设的外破点类别判断条件,得到目标分类结果;其中,所述外破点类别判断条件包括:若至少存在一个第一边界框的目标分类信息为外破点,则所述二维图像数据存在外破点,并得到所述外破点对应的第二边界框顶点;其中,所述目标分类结果包括第二边界框顶点。
技术特征:
1.一种基于激光雷达的空间量测方法,其特征在于,包括:
2.如权利要求1所述的基于激光雷达的空间量测方法,其特征在于,所述根据预设的标定信息,获取所述目标分类结果对应的第二边界框顶点在三维空间中的三维边界框顶点,包括:
3.如权利要求1所述的基于激光雷达的空间量测方法,其特征在于,所述根据所述三维边界框顶点和所述单目相机的光心,获取若干空间直线,并根据若干空间直线,得到所述外破点在所述三维空间中的坐标位置,包括:
4.如权利要求3所述的基于激光雷达的空间量测方法,其特征在于,所述根据所述地面点和所述第一空间直线,得到所述外破点在三维点云数据中的坐标位置,包括:
5.如权利要求1所述的基于激光雷达的空间量测方法,其特征在于,所述标定信息是根据激光雷达与所述单目相机进行联合标定得到的,包括:
6.如权利要求5所述的基于激光雷达的空间量测方法,其特征在于,所述根据所述shot特征描述和surf特征描述,建立三维点云数据与二维图像数据的映射关系,并根据所述映射关系,得到标定信息,包括:
7.如权利要求6所述的基于激光雷达的空间量测方法,其特征在于,所述将所述历史点云数据与所述图像数据进行融合,得到所述标定信息,包括:
8.如权利要求1所述的基于激光雷达的空间量测方法,其特征在于,所述在所述二维图像数据中,预测所述目标物体的若干第一边界框,包括:
9.如权利要求8所述的基于激光雷达的空间量测方法,其特征在于,所述依次预测每个网格中若干第一边界框及第一边界框对应的置信度,包括:
10.如权利要求9所述的基于激光雷达的空间量测方法,其特征在于,在所述分别得到对应的多维张量结果之后,依次对若干第一边界框进行分类,得到具有外破点的目标分类结果,包括:
技术总结
本发明公开了一种基于激光雷达的空间量测方法,包括:根据单目相机获取目标物体在当前的二维图像数据,并在二维图像数据中,预测目标物体的若干第一边界框,并依次对若干第一边界框进行分类,得到具有外破点的目标分类结果;根据预设的标定信息,获取目标分类结果对应的第二边界框顶点在三维空间中的三维边界框顶点;根据三维边界框顶点和单目相机的光心,获取若干空间直线,并根据若干空间直线,得到外破点在三维空间中的坐标位置;根据坐标位置,对外破点进行测距计算,并根据得到的测距结果对目标物体的外破点处进行检修;采用本发明能够提高识别输电线路上外破点的精确度,从而便于输电线路的检修和恢复。
技术研发人员:刘高,李端姣,廖建东,唐子峰,郭圣,王年孝,饶成成,李昌煜,陈斯炯
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!