基于边缘检测的接触网几何参数走行式智能测量仪及方法与流程
本发明涉及接触网测量,具体而言,涉及一种基于边缘检测的接触网几何参数走行式智能测量仪及方法。
背景技术:
1、接触网几何参数测量仪是目前铁路上常用的接触网测量、检修设备。
2、目前主流的测距方式有相位式激光测距和激光雷达测距两种方案。相位式激光测距方案准确度高(最高可达到±1mm的测距准确度),但工作频率低,无法实现接触网轮廓的快速识别,需要手动旋转激光测距模块对准接触网进行测量,工作流程复杂,工作效率低;激光雷达测距方案工作频率高,可实现推行测量与自动测量,但准确度较低,无法满足现行《jjg(铁道)150-2020接触网几何参数测量仪》计量检定规程中对于最大允许误差和重复性的要求。
技术实现思路
1、为提高测量精度和效率,本发明提供一种基于边缘检测的接触网几何参数走行式智能测量仪及方法。
2、本发明采取的技术方案如下:
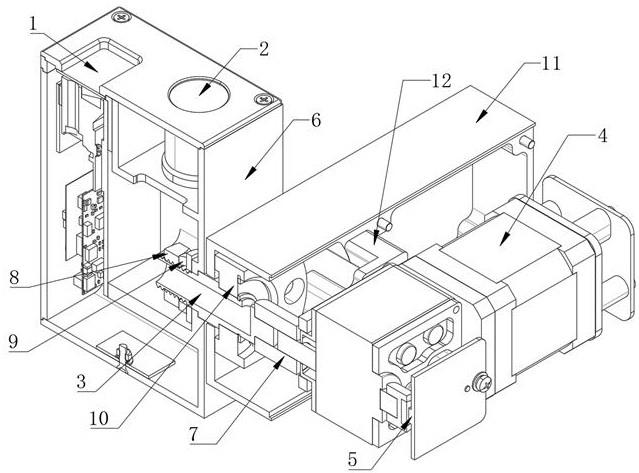
3、第一方面,本发明提供一种接触网几何参数走行式智能测量仪,包括:
4、装配有电子磁编码器的闭环减速电机;
5、驱动轴,其一端通过联轴器同轴连接所述闭环减速电机的转轴;
6、前端封装壳体,固定于所述驱动轴的另一端;
7、相位式激光测距模块,安装于所述前端封装壳体,且垂直于所述驱动轴;
8、摄像头,安装于所述前端封装壳体,平行于所述相位式激光测距模块,且摄像方向与所述相位式激光测距模块的激光测距方向相同。
9、在本发明的一较佳实施方式中,所述闭环减速电机通过电机固定架安装于后端封装壳体,所述驱动轴穿出所述后端封装壳体后,延伸至所述前端封装壳体内。
10、在本发明的一较佳实施方式中,所述后端封装壳体内设置轴承座,所述驱动轴转动装配于所述轴承座。
11、在本发明的一较佳实施方式中,所述前端封装壳体内设置锁紧螺母和垫片,所述驱动轴通过所述锁紧螺母和垫片固定于所述驱动轴。
12、第二方面,本发明提供一种基于边缘检测的接触网几何参数走行式智能测量方法,采用了第一方面所述的接触网几何参数走行式智能测量仪,且包括以下步骤:
13、s1、通过摄像头采集目标接触线图像,基于canny边缘检测算法从中找到接触线边缘,计算目标接触线中心点位置;
14、s2、计算摄像头当前角度位置与目标接触线中心点位置的角度差值;
15、s3、闭环减速电机以角度差值作为反馈形成闭环,结合pid算法进行转动不断调节摄像头角度,直至摄像头中心对准目标接触线中心;
16、s4、启动激光测距模块测量目标接触线和接触线下方轨平面之间的距离,并返回距离测量结果;
17、s5、若距离测量结果位于距离阈值区间范围内,则保存距离测量结果,否则丢弃距离测量结果。
18、距离阈值区间范围是指设定的接触网高度范围,标准中是5.2米至6.5米之间,在本发明中,设置5米至7米之间。
19、在本发明的一较佳实施方式中,步骤s1中,目标接触线中心点位置的计算方法包括:
20、首先将目标接触线图像经过5×5高斯滤波器滤除图像中的噪声,然后按照如下公式获得目标接触线的边缘梯度和角度:
21、,
22、其中,gx和gy分别代表图像横向和纵向的梯度;
23、最后检查目标接触线的边缘梯度和角度是否为渐变方向上的局部最大值,若不是渐变方向上的局部最大值,则丢弃;若是渐变方向上的局部最大值,否则保留该局部最大值,并将目标接触线的边缘梯度和角度与边缘预设阈值比较,得到准确的目标接触线边缘,根据目标接触线的两侧边缘求解出目标接触线中心点坐标。
24、在本发明的一较佳实施方式中,步骤s2具体包括以下步骤:
25、s21、计算目标接触线中心点位置与摄像头中心点的像素差值;
26、s22、使闭环减速电机转动固定角度,获取该过程中电子磁编码器的位置变化信息;
27、s23、根据位置变化信息和像素差值计算摄像头的转动步进;
28、s24、根据像素差值和转动步进计算摄像头当前角度位置与目标接触线中心点位置的角度差值。在本发明的一较佳实施方式中,在完成步骤s5后,跳转至步骤s1,以实现目标跟随测量。
29、在本发明的一较佳实施方式中,得到目标接触线边缘的具体方法包括:通过计算像素梯度的幅值得到边缘强度,边缘预设阈值包括高阈值和低阈值两个阈值,低阈值的值为高阈值的一半;将强度分为强边缘、弱边缘和非边缘三类,如果边缘强度高于高阈值,则被标记为强边缘;如果边缘强度低于低阈值,则被标记为非边缘;如果边缘强度介于两个阈值之间,则被标记为弱边缘;梯度角度用于确定边缘的准确位置和方向;在边缘检测中,梯度角度用于判断梯度幅值是否为局部最大值,在非极大值抑制过程中,沿着梯度方向上的两个邻近像素的梯度幅值与当前像素的梯度幅值进行比较,只有当当前像素的梯度幅值是沿着梯度方向上的最大值时,才会被保留为候选边缘点,否则会被抑制;在边缘连接过程中,梯度角度用于判断是否将位于低阈值和高阈值之间的梯度幅值像素与强边缘像素连接起来,只有当位于低阈值和高阈值之间的梯度幅值像素与强边缘像素在梯度方向上相邻,才会被保留为边缘点之一。
30、与现有技术相比,本发明的有益效果是:
31、1)结合了canny边缘检测算法的高频率与相位式激光测距的高准确度,实现了高精度的自动测量;
32、2)使用常规的摄像头模组(即低成本的摄像头模组,比如电脑摄像头,或者常见的usb摄像头模组)与相位式激光测距模组就可实施本技术方案,实施简单,成本低;
33、3)使用激光测距数据校验图像识别结果,剔除误识别项,提高自动测量准确度。
34、为使本发明的上述目的、特征和优点能更明显易懂,下文特举本发明实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种接触网几何参数走行式智能测量仪,其特征在于,包括:
2.根据权利要求1所述的接触网几何参数走行式智能测量仪,其特征在于,所述闭环减速电机通过电机固定架安装于后端封装壳体,所述驱动轴穿出所述后端封装壳体后,延伸至所述前端封装壳体内。
3.根据权利要求2所述的接触网几何参数走行式智能测量仪,其特征在于,所述后端封装壳体内设置轴承座,所述驱动轴转动装配于所述轴承座。
4.根据权利要求2所述的接触网几何参数走行式智能测量仪,其特征在于,所述前端封装壳体内设置锁紧螺母和垫片,所述驱动轴通过所述锁紧螺母和垫片固定于所述驱动轴。
5.一种基于边缘检测的接触网几何参数走行式智能测量方法,其特征在于,采用了权利要求1~4任一项所述的接触网几何参数走行式智能测量仪,且包括以下步骤:
6.根据权利要求5所述基于边缘检测的接触网几何参数走行式智能测量方法,其特征在于,步骤s1中,目标接触线中心点位置的计算方法包括:
7.根据权利要求5所述基于边缘检测的接触网几何参数走行式智能测量方法,其特征在于,步骤s2具体包括以下步骤:
8.根据权利要求5所述基于边缘检测的接触网几何参数走行式智能测量方法,其特征在于,在完成步骤s5后,跳转至步骤s1,以实现目标跟随测量。
9.根据权利要求5所述基于边缘检测的接触网几何参数走行式智能测量方法,其特征在于,得到目标接触线边缘的具体方法包括:通过计算像素梯度的幅值得到边缘强度,边缘预设阈值包括高阈值和低阈值两个阈值,低阈值的值为高阈值的一半;将强度分为强边缘、弱边缘和非边缘三类,如果边缘强度高于高阈值,则被标记为强边缘;如果边缘强度低于低阈值,则被标记为非边缘;如果边缘强度介于两个阈值之间,则被标记为弱边缘;梯度角度用于确定边缘的准确位置和方向;在边缘检测中,梯度角度用于判断梯度幅值是否为局部最大值,在非极大值抑制过程中,沿着梯度方向上的两个邻近像素的梯度幅值与当前像素的梯度幅值进行比较,只有当当前像素的梯度幅值是沿着梯度方向上的最大值时,才会被保留为候选边缘点,否则会被抑制;在边缘连接过程中,梯度角度用于判断是否将位于低阈值和高阈值之间的梯度幅值像素与强边缘像素连接起来,只有当位于低阈值和高阈值之间的梯度幅值像素与强边缘像素在梯度方向上相邻,才会被保留为边缘点之一。
技术总结
本发明公开了一种基于边缘检测的接触网几何参数走行式智能测量仪及方法,装置包括摄像头、驱动轴、相位式激光测距模块和装配有电子磁编码器的闭环减速电机。方法包括:通过摄像头采集目标接触线图像,基于Canny边缘检测算法从中找到接触线边缘,计算目标接触线中心点位置;闭环减速电机根据角度差值转动,采用PID算法不断调节摄像头角度,直至摄像头中心对准目标接触线中心;启动激光测距模块测量目标接触线和摄像头之间的距离,并返回距离测量结果;若距离测量结果位于距离阈值区间范围内,则保存距离测量结果,否则丢弃距离测量结果。本发明结合了Canny边缘检测算法的高频率与相位式激光测距的高准确度,实现了高精度的自动测量。
技术研发人员:李佶林,张晓光,白玉发,金宝瞳,徐平,严荣春
受保护的技术使用者:领视科技成都有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!