导线弧垂值的确定方法、装置及电子设备与流程
本发明涉及导线领域,具体而言,涉及一种导线弧垂值的确定方法、装置及电子设备。
背景技术:
1、架空电力线路是电力网络的主要组成部分,是结构较为复杂的超大规模系统,其安全稳定运行是保证电网整体可靠性良好的重要基础,电力线路一旦故障跳闸往往对电网造成巨大冲击。架空电力线路分布区域广阔,自然环境、人类活动、线路本体等方面相关不稳定因素均可能危及线路安全。
2、导线弧垂是线路本体的关键参数且长期持续动态变化,受环境温度、线路负载、覆冰程度等多种因素综合影响,弧垂大小显著影响线路在大风、冰雪等天气下的安全稳定程度,线路运维工作需要经常计算校核弧垂,对于不合格情况及时处置,保障电网安全稳定运行。
3、现有弧垂计算方法往往需要借助大量的导线材料力学参数与较为复杂的数学公式,且计算过程一般需要借助电子计算工具,无法满足工作现场计算的时效性、便捷性。
4、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种导线弧垂值的确定方法、装置及电子设备,以至少解决相关技术中确定导线弧垂值时确定过程困难的技术问题。
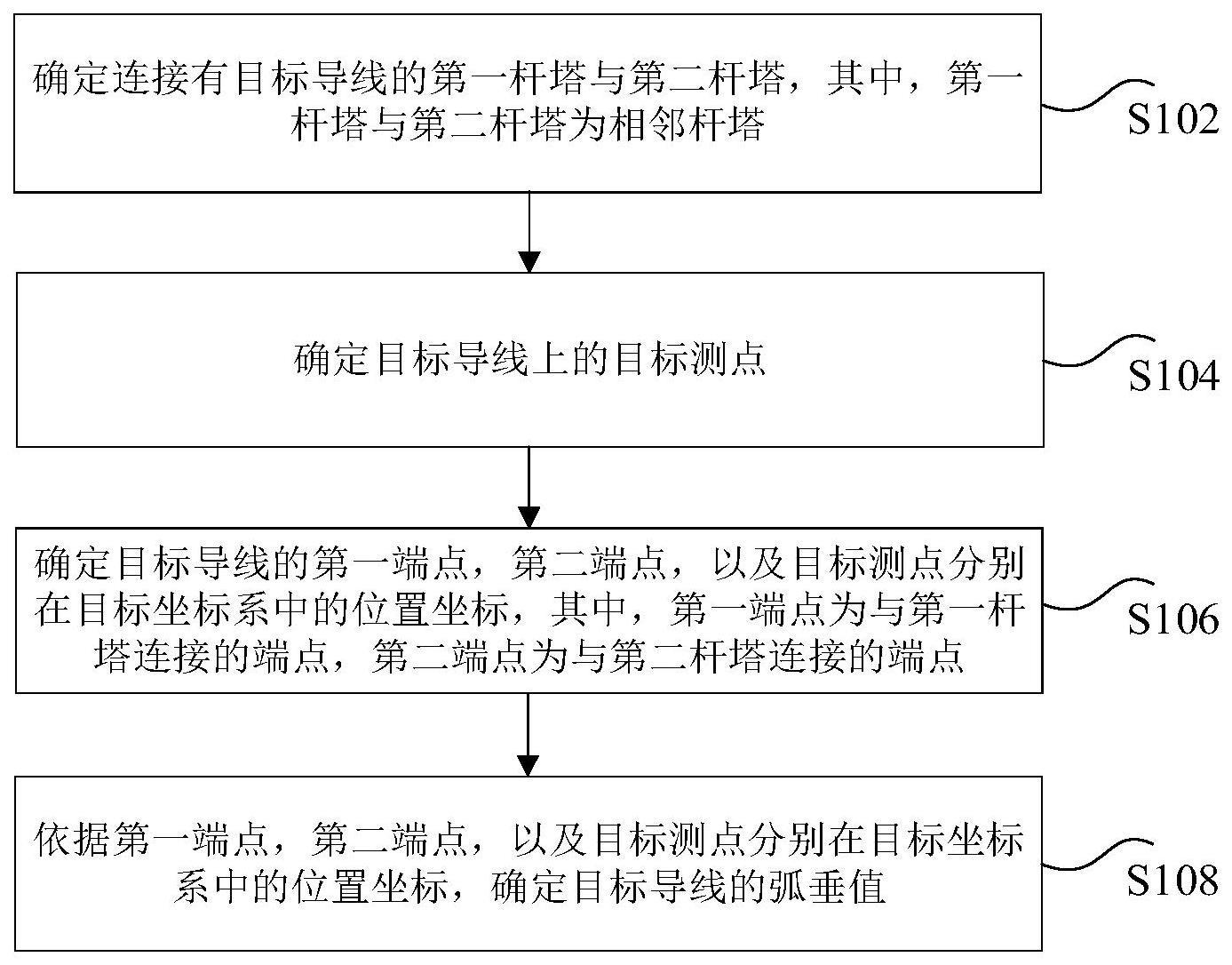
2、根据本发明实施例的一个方面,提供了一种导线弧垂值的确定方法,包括:确定连接有目标导线的第一杆塔与第二杆塔,其中,所述第一杆塔与所述第二杆塔为相邻杆塔;确定所述目标导线上的目标测点;确定所述目标导线的第一端点,第二端点,以及所述目标测点分别在目标坐标系中的位置坐标,其中,所述第一端点为与所述第一杆塔连接的端点,所述第二端点为与所述第二杆塔连接的端点;依据所述第一端点,所述第二端点,以及所述目标测点分别在所述目标坐标系中的位置坐标,确定所述目标导线的弧垂值。
3、可选地,所述确定所述目标导线的第一端点,第二端点,以及所述目标测点分别在目标坐标系中的位置坐标之前,还包括:确定所述第一杆塔对应的第一中心底点,以及所述第二杆塔对应的第二中心底点,其中,所述第一中心底点为所述第一杆塔在目标水平面上横截面的中心点,所述第二中心底点为所述第二杆塔在所述目标水平面上横截面的中心点;构建以所述第一中心底点为原点,第一中心底点向所述第二中心底点延伸的方向为横轴正方向,以第一中心底点向上为纵轴正方向的所述目标坐标系。
4、可选地,所述确定所述目标导线的第一端点,第二端点,以及所述目标测点分别在目标坐标系中的位置坐标,包括:确定所述第一端点与所述第一中心底点的第一横向距离,所述第一端点与所述第一中心底点的第一纵向距离,所述第二端点与所述第一端点的第二横向距离,所述第二端点与所述第二中心底点的第二纵向距离;依据所述第一横向距离,所述第一纵向距离,所述第二横向距离,所述第二纵向距离,确定所述第一端点与所述第二端点分别在所述目标坐标系中的位置坐标;确定所述目标测点与目标端点的第三横向距离与第三纵向距离,其中,所述目标端点至少包括以下至少之一:所述第一端点,所述第二端点;依据所述第三横向距离,所述第三纵向距离以及所述目标端点在所述目标坐标系中的位置坐标,得到所述目标测定在所述目标坐标系中的位置坐标。
5、可选地,所述依据所述第一端点,所述第二端点,以及所述目标测点分别在所述目标坐标系中的位置坐标,确定所述目标导线的弧垂值,包括:依据所述第一端点,所述第二端点,以及所述目标测点分别在所述目标坐标系中的位置坐标,确定所述目标导线的目标二次函数;依据所述目标二次函数,确定所述目标导线的所述弧垂值。
6、可选地,所述依据所述第一端点,所述第二端点,以及所述目标测点分别在所述目标坐标系中的位置坐标,确定所述目标导线的目标二次函数,包括:在所述目标测定包括多个的情况下,从多个目标测点中取预定间隔距离的多个间隔测点,所述多个目标测点中其余的测定作为校正测点;依据所述第一端点,所述第二端点,以及所述多个间隔测点分别在所述目标坐标系中的位置坐标,确定所述目标导线的初始二次函数;依据所述校正测点分别在所述目标坐标系中的位置坐标,校正所述初始二次函数,得到所述目标二次函数。
7、可选地,所述依据所述第一端点,所述第二端点,以及所述目标测点分别在所述目标坐标系中的位置坐标,确定所述目标导线的弧垂值,包括:依据所述第一端点,所述第二端点分别在所述目标坐标系中的位置坐标,确定所述目标导线的目标一次函数;确定所述目标二次函数与所述目标一次函数的差值,得到目标差值函数;确定所述目标差值函数的最大值,得到所述弧垂值。
8、可选地,所述依据所述第一端点,所述第二端点,以及所述目标测点分别在所述目标坐标系中的位置坐标,确定所述目标导线的弧垂值,包括:在所述目标测点在所述目标坐标系中的位置坐标于预定时间段内不变化的情况下,依据所述第一端点,所述第二端点,以及所述目标测点分别在所述目标坐标系中的位置坐标,确定所述弧垂值。
9、根据本发明实施例的一个方面,提供了一种导线弧垂值的确定装置,包括:第一确定模块,用于确定连接有目标导线的第一杆塔与第二杆塔,其中,所述第一杆塔与所述第二杆塔为相邻杆塔;第二确定模块,用于确定所述目标导线上的目标测点;第三确定模块,用于确定所述目标导线的第一端点,第二端点,以及所述目标测点分别在目标坐标系中的位置坐标,其中,所述第一端点为与所述第一杆塔连接的端点,所述第二端点为与所述第二杆塔连接的端点;第四确定模块,用于依据所述第一端点,所述第二端点,以及所述目标测点分别在所述目标坐标系中的位置坐标,确定所述目标导线的弧垂值。
10、根据本发明实施例的一个方面,提供了一种电子设备,包括:处理器;用于存储所述处理器可执行指令的存储器;其中,所述处理器被配置为执行所述指令,以实现上述任一项所述的导线弧垂值的确定方法。
11、根据本发明实施例的一个方面,提供了一种计算机可读存储介质,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行上述任一项所述的导线弧垂值的确定方法。
12、在本发明实施例中,确定连接有目标导线的第一杆塔与第二杆塔,其中,第一杆塔与第二杆塔为相邻杆塔,确定目标导线的与第一杆塔连接的第一端点,与第二杆塔连接的第二端点,以及选定的一个目标测点分别在目标坐标系中的位置坐标。依据第一端点,第二端点,以及目标测点分别在目标坐标系中的位置坐标,即可确定出目标导线的弧垂值,通过该方式,能够快速、简便地确定出目标导线的弧垂值,进而解决了相关技术中确定导线弧垂值时确定过程困难的技术问题。
技术特征:
1.一种导线弧垂值的确定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述确定所述目标导线的第一端点,
3.根据权利要求2所述的方法,其特征在于,所述确定所述目标导线的第一端点,
4.根据权利要求1所述的方法,其特征在于,所述依据所述第一端点,所述第二端点,以及所述目标测点分别在所述目标坐标系中的位置坐标,确定所述目标导线的弧垂值,包括:
5.根据权利要求4所述的方法,其特征在于,所述依据所述第一端点,所述第二端点,以及所述目标测点分别在所述目标坐标系中的位置坐标,确定所述目标导线的目标二次函数,包括:
6.根据权利要求4所述的方法,其特征在于,所述依据所述第一端点,所述第二端点,以及所述目标测点分别在所述目标坐标系中的位置坐标,确定所述目标导线的弧垂值,包括:
7.根据权利要求1至6中任意一项所述的方法,其特征在于,所述依据所述第一端点,所述第二端点,以及所述目标测点分别在所述目标坐标系中的位置坐标,确定所述目标导线的弧垂值,包括:
8.一种导线弧垂值的确定装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行如权利要求1至7中任一项所述的导线弧垂值的确定方法。
技术总结
本发明公开了一种导线弧垂值的确定方法、装置及电子设备。其中,该方法包括:确定连接有目标导线的第一杆塔与第二杆塔,其中,第一杆塔与第二杆塔为相邻杆塔;确定目标导线上的目标测点;确定目标导线的第一端点,第二端点,以及目标测点分别在目标坐标系中的位置坐标,其中,第一端点为与第一杆塔连接的端点,第二端点为与第二杆塔连接的端点;依据第一端点,第二端点,以及目标测点分别在目标坐标系中的位置坐标,确定目标导线的弧垂值。本发明解决了相关技术中确定导线弧垂值时确定过程困难的技术问题。
技术研发人员:李鸿达,周恺,叶宽,赵建勇,王雅妮,张睿哲,蔡瀛淼,李春生
受保护的技术使用者:国网北京市电力公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!