基于环境感知的巷道内轨道检测方法及相关设备与流程
本申请涉及智能检测领域,更具体地说,本发明涉及一种基于环境感知的巷道内轨道检测方法及相关设备。
背景技术:
1、煤矿井下斜井轨道是煤矿内煤炭和矿工运输的重要通道。障碍物的存在可能导致轨道堵塞、车辆脱轨等危险情况,严重影响井下运输的安全。通过斜井轨道障碍物检测,可以及时发现并报警未及时清理的障碍物,降低事故风险,保障工人的生命安全。在煤矿生产中,保持斜井轨道畅通对于煤炭和设备的运输至关重要。如果斜井轨道存在障碍物,将影响运输的流畅性和效率,增加了煤炭和物资的运输时间,降低了生产效率。障碍物检测可帮助及时发现并解决轨道问题,提高运输效率。随着技术的发展,煤矿生产逐渐向自动化和智能化方向发展。
2、目前,经常在斜井轨道两边工作的工人在两边工作的时候会不在意的把一些铲子等障碍物横放在轨道面上,这样会导致主运输车在运行的过程中碰到这些人为的障碍物而脱轨。另外在主运输车运行的过程中会存在煤渣掉落的情况下,有时候不能及时清理也会导致运输车脱轨。这些都会造成严重的生产事故,存在较大的人员安全和生产完全的隐患。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、为了解决在斜井轨道附近的工作人员及生产工具或主运输车运行的过程中会存在煤渣掉落等轨道障碍物影响运输的流畅性和效率甚至造成严重的生产事故的问题,第一方面,本发明提出一种基于环境感知的巷道内轨道检测方法,上述方法包括:
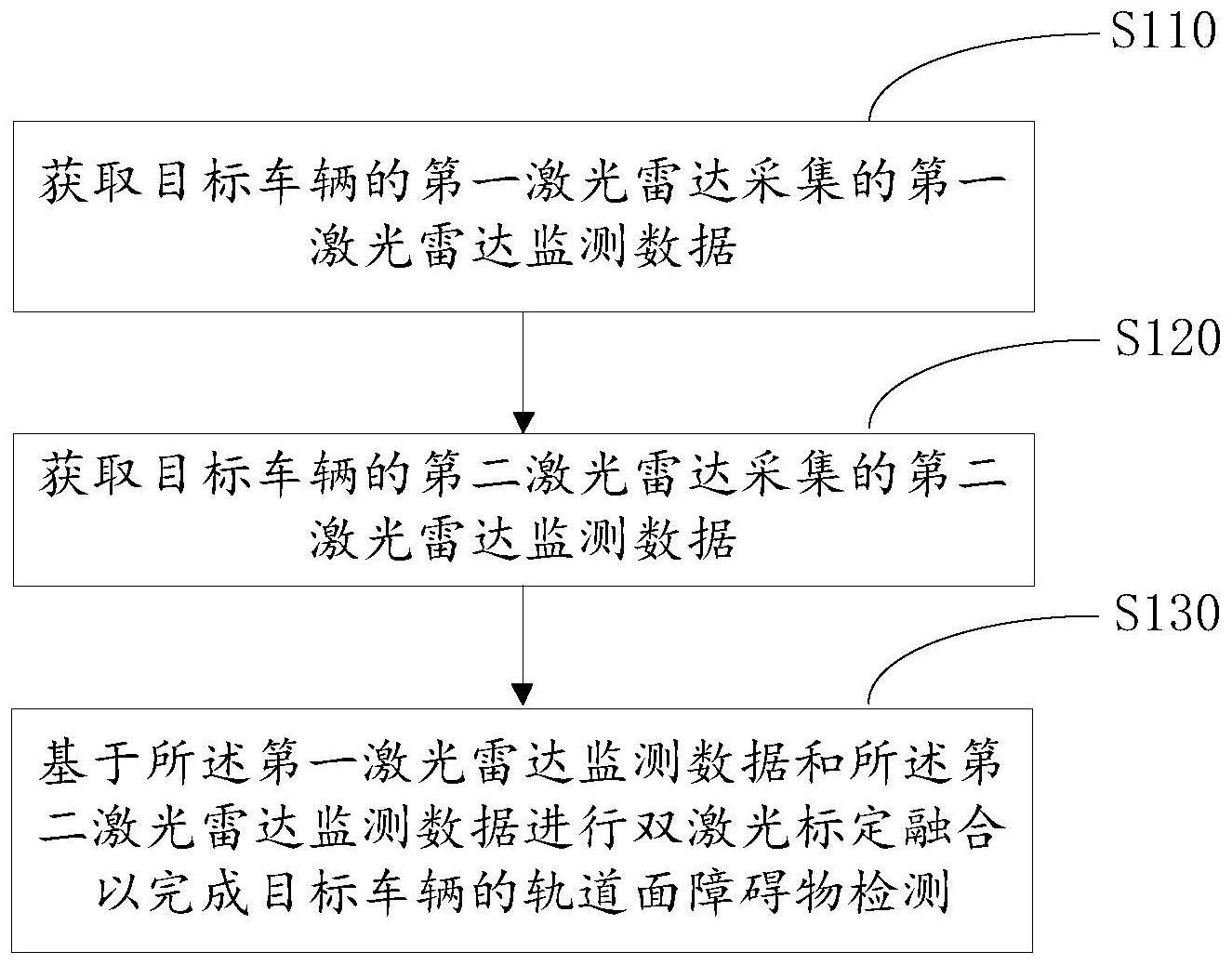
3、获取目标车辆的第一激光雷达采集的第一激光雷达监测数据,其中,所述第一激光雷达监测数据用于获取巷道面特征信息;
4、获取目标车辆的第二激光雷达采集的第二激光雷达监测数据,其中,所述第二激光雷达监测数据用于获取轨道面特征信息;
5、基于所述第一激光雷达监测数据和所述第二激光雷达监测数据进行双激光标定融合,以完成目标车辆的轨道面障碍物检测。
6、可选的,还包括:
7、基于所述第一激光雷达监测数据,确定所述目标车辆的行进位姿信息;
8、根据所述行进位姿信息优化所述第二激光雷达监测数据。
9、可选的,所述基于所述第一激光雷达监测数据和所述第二激光雷达监测数据进行双激光标定融合,包括:
10、通过多个标定点对第一激光雷达监测数据和所述第二激光雷达监测数据中的至少一组监测数据进行坐标系转换;
11、通过点云匹配和点云融合生成全局坐标系下的点云数据。
12、可选的,基于所述第一激光雷达监测数据和所述第二激光雷达监测数据进行双激光标定融合,以完成目标车辆的轨道面障碍物检测,包括:
13、基于全局坐标系下的点云数据获得前端里程计信息;
14、通过图优化的方式对前端里程计信息进行后端优化进行环境感知建图以完成目标车辆的轨道面障碍物检测。
15、可选的,还包括:
16、采用回环检测的方式对建立的地图和定位信息进行优化;
17、采用ransac模型拟合算法基于优化后的地图和定位信息生成轨道面的包络面数据,以完成目标车辆的轨道面障碍物检测。
18、可选的,所述第一激光雷达为相对车辆或轨道面平置的激光雷达,所述第二激光雷达为相对车辆或轨道面斜置的激光雷达。
19、可选的,还包括:
20、在检测到轨道障碍物的情况下,通过计算所述目标车辆当前与所述轨道障碍物的距离以及障碍物的点云数据推测障碍物的尺寸;
21、在所述轨道障碍物的尺寸大于预设尺寸的情况下,获取轨道障碍物的与轨道面的接触特征,所述接触特征包括轨道障碍物与轨道面的接触面与轨道障碍物表面的比例关系,在所述比例关系小于预设比例的情况下保持所述目标车辆的运行,否则,生成停车告警。
22、第二方面,本发明还提出一种基于环境感知的巷道内轨道检测装置,包括:
23、接收单元,用于接收目标配送订单的目标地址信息;
24、预测单元,用于根据所述目标地址信息预测配送场景信息;
25、确定单元,用于基于所述配送场景信息确定目标取货验证等级,以完成物品的配送。
26、第三方面,一种电子设备,包括:存储器、处理器以及存储在上述存储器中并可在上述处理器上运行的计算机程序,上述处理器用于执行存储器中存储的计算机程序时实现如上述的第一方面任一项的基于环境感知的巷道内轨道检测方法的步骤。
27、第四方面,本发明还提出一种计算机可读存储介质,其上存储有计算机程序,上述计算机程序被处理器执行时实现第一方面上述任一项的基于环境感知的巷道内轨道检测方法。
28、综上,本申请提出的基于环境感知的巷道内轨道检测方法,通过获取目标车辆的第一激光雷达采集的第一激光雷达监测数据,其中,所述第一激光雷达监测数据用于获取巷道面特征信息;获取目标车辆的第二激光雷达采集的第二激光雷达监测数据,其中,所述第二激光雷达监测数据用于获取轨道面特征信息;基于所述第一激光雷达监测数据和所述第二激光雷达监测数据进行双激光标定融合,以完成目标车辆的轨道面障碍物检测。由此,使得车辆可以主动识别前方铁轨上和铁轨附近的物体、潜在障碍物。采用双激光雷达配合使用的方法进行数据配准。因为在煤矿井下巷道中实现,煤矿中的巷道壁特征非常丰富,便于做单激光雷达的slam。两个激光雷达相互配合提升点云数据密度,更好的做障碍物检测。
29、本发明的基于环境感知的巷道内轨道检测方法,本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
技术特征:
1.一种基于环境感知的巷道内轨道检测方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,还包括:
3.如权利要求1所述的方法,其特征在于,所述基于所述第一激光雷达监测数据和所述第二激光雷达监测数据进行双激光标定融合,包括:
4.如权利要求3所述的方法,其特征在于,基于所述第一激光雷达监测数据和所述第二激光雷达监测数据进行双激光标定融合,以完成目标车辆的轨道面障碍物检测,包括:
5.如权利要求4所述的方法,其特征在于,还包括:
6.如权利要求1至5中任一项所述的方法,其特征在于,所述第一激光雷达为相对车辆或轨道面平置的激光雷达,所述第二激光雷达为相对车辆或轨道面斜置的激光雷达。
7.如权利要求1至5中任一项所述的方法,其特征在于,还包括:
8.一种基于环境感知的巷道内轨道检测装置,其特征在于,包括:
9.一种电子设备,包括:存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器用于执行存储器中存储的计算机程序时实现如权利要求1-7中任一项所述的基于环境感知的巷道内轨道检测方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1-7中任一项所述的基于环境感知的巷道内轨道检测方法。
技术总结
本发明公开了一种基于环境感知的巷道内轨道检测方法及相关设备。上述方法包括:获取目标车辆的第一激光雷达采集的第一激光雷达监测数据,其中,所述第一激光雷达监测数据用于获取巷道面特征信息;获取目标车辆的第二激光雷达采集的第二激光雷达监测数据,其中,所述第二激光雷达监测数据用于获取轨道面特征信息;基于所述第一激光雷达监测数据和所述第二激光雷达监测数据进行双激光标定融合,以完成目标车辆的轨道面障碍物检测。能够融合不同激光雷达采集的数据来识别障碍物,解决在斜井轨道附近的工作人员及生产工具或主运输车运行的过程中会存在煤渣掉落等轨道障碍物影响运输的流畅性和效率甚至造成严重的生产事故的问题。
技术研发人员:陶永亮,陈红涛
受保护的技术使用者:沈阳盛科御旷科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!