一种无人驾驶小车前方障碍物距离测量方法
本发明属于激光雷达测距,具体涉及一种无人驾驶小车前方障碍物距离测量方法。
背景技术:
1、激光雷达,是一种用激光器作为发射光源,采用光电探测技术手段的主动遥感设备,其通过激光信号的时间差、或相位差确定与目标物的距离。激光雷达的探测距离较长,可达200米以上,且激光雷达在工作时,有可能受到外界光照条件的影响,因此,对于激光雷达测距准度的测试,通常在户外进行。
2、评估激光雷达测距准度的方法可以包括实验室测试、控制环境下的对比测试、地面真实场景测试等。具体的评估方法和指标可能会因不同的激光雷达系统和应用而有所不同。然而,由于固态激光雷达通常具有固定的视场角度,如果障碍物不在光束的中心位置,可能会对测量结果造成一定的影响。
技术实现思路
1、本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种无人驾驶小车前方障碍物距离测量方法,用于解决固态激光雷达易受外界干扰,以及固态激光雷达测距时固定视场角度的技术问题,能够提高获取的测距准度和鲁棒性。
2、本发明采用以下技术方案:
3、一种无人驾驶小车前方障碍物距离测量方法,其特征在于,包括以下步骤:
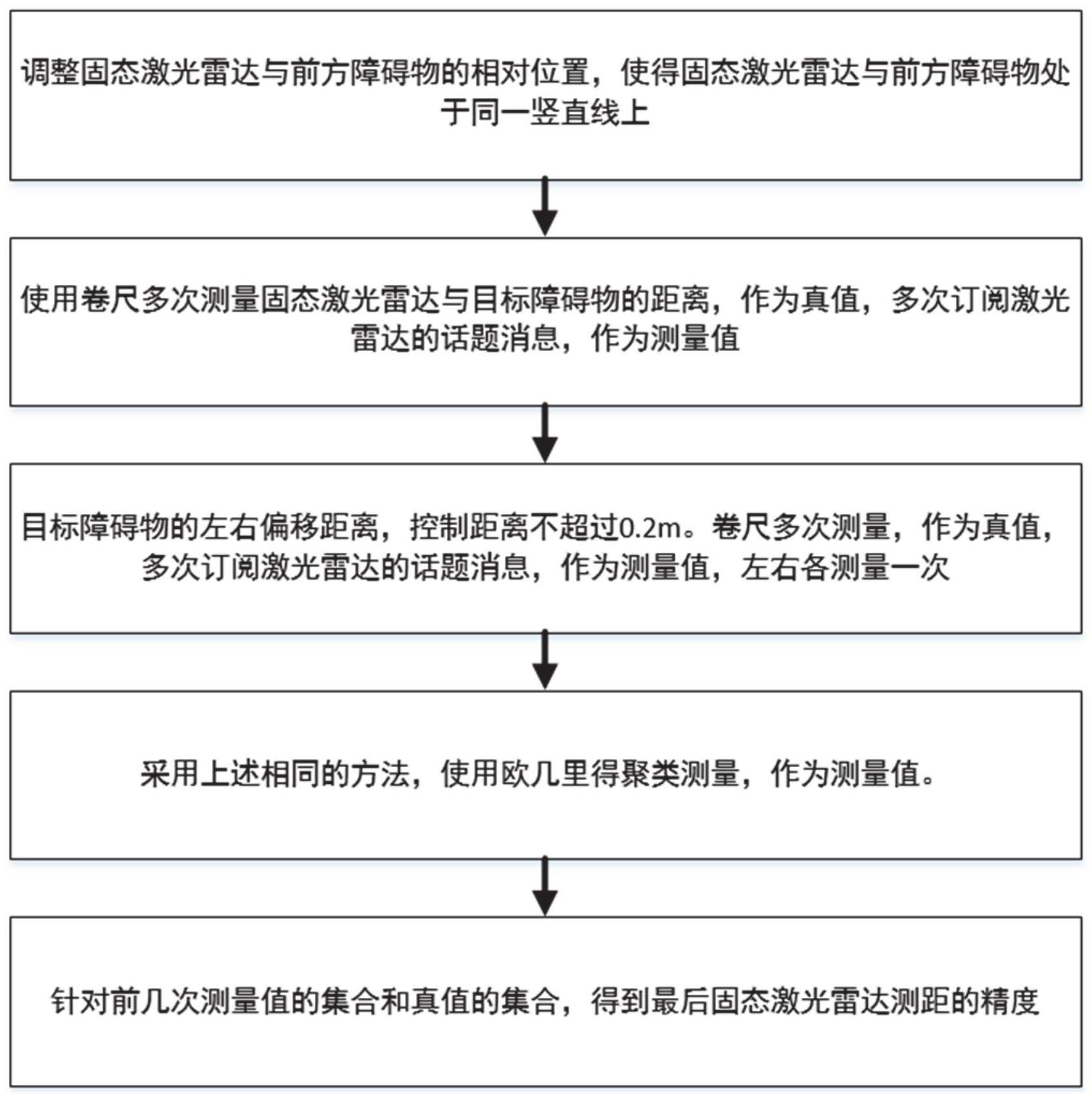
4、s1、调节无人驾驶小车车头的固态激光雷达,使得固态激光雷达与目标障碍物在一条竖直线上;
5、s2、测量雷达与障碍物的距离并作为距离真实值st;
6、s3、重复步骤s2得到多个距离真实值st构建得到真实距离集合c1,多次订阅激光雷达的节点话题,得到估计值集合c2;
7、s4、变换障碍物的横向位置,对步骤s3得到的真实距离集合c1和估计值集合c2,基于点云聚类处理获取得到真实距离集合c3和估计值集合c4;
8、s5、将步骤s4得到的真实距离集合c3和估计值集合c4进行比较,得到准确距离。
9、具体的,步骤s1中,激光雷达的入射光垂直入射障碍物。
10、具体的,步骤s4具体为:
11、s401、运行欧几里得聚类算法,变化所选障碍物的横向位置,保证其在所选的聚类框中,获取所得估计值的集合;
12、s402、对真实值的集合求平均,得到真实值平均值t1avg;
13、s403、再次使激光雷达与障碍物处于同一竖直线上,重新测量障碍物到固态激光雷达的距离得到真实距离集合c3;
14、s404、订阅欧几里得聚类后的距离信息,得到固态激光雷达到前方障碍物的距离,多次订阅后得到估计值集合c4。
15、进一步的,步骤s401具体为:
16、s4011、往左偏移0.2m,测量此时障碍物距离激光雷达的距离作为真实值,多次测量得到真实值集合c1l;
17、s4012、订阅激光雷达的节点话题,得到前方的距离,多次订阅得到估计值集合c2l;
18、s4013、往右偏移0.2m,测量此时障碍物距离激光雷达的距离作为真实值,多次测量得到真实值集合c1r;
19、s4014、订阅激光雷达的节点话题,得到前方的距离,多次订阅得到估计值集合c2r。
20、进一步的,步骤s402具体为:
21、s4021、对估计值的集合求平均,得到估计值的平均值e1avg;
22、s4022、计算固态激光雷达的测量误差,记直接订阅点云节点话题获得的距离的测量误差为σ1。
23、更进一步的,距离的测量误差为σ1为:
24、σ1=(e1avg-t1avg)/t1avg。
25、
26、进一步的,步骤s403中,将固态激光雷达的三维点云数据划分为一块块的障碍物点云簇,提取前方障碍物的点云信息,计算得到的前方障碍物距离信息d,通过话题发布的方式,将激光雷达到前方障碍物的点云信息进行发布。
27、更进一步的,聚类后点云簇x轴方向的形心坐标x为:
28、
29、聚类后点云簇y轴方向的形心坐标y为:
30、
31、聚类后点云簇z轴方向的形心坐标z为:
32、
33、聚类后障碍物长方体的长度l为:
34、l=|xmax-xmin|
35、聚类后障碍物长方体的宽度w为:
36、w=|ymax-ymin|
37、聚类后障碍物长方体的高度h为:
38、h=|zmax-zmin|
39、前方障碍物距离信息d为:
40、
41、其中,xi为点云簇第i个点的x坐标,n为点云簇中点云的数量,yi为点云簇第i个点的y轴坐标,zi为点云簇第i个点的z轴坐标,xmax为点云簇中点云x轴坐标的最大值,xmin为点云簇中点云x轴坐标的最小值,ymax为点云簇中点云y轴坐标的最大值,ymin为点云簇中点云y轴坐标的最小值,zmax为点云簇中点云z轴坐标的最大值,zmin为点云簇中点云z轴坐标的最小值。
42、具体的,步骤s404具体为:
43、使障碍物往左偏移0.2m,多次订阅得到固态激光雷达到前方障碍物的距离集合,作为估计值集合c4l;
44、使障碍物往左偏移0.2m,测量此时障碍物距固态激光雷达的距离作为真实值,多次测量得到真实值集合c3l;
45、使障碍物往右偏移0.2m,多次订阅得到固态激光雷达到前方障碍物的距离集合,作为估计值集合c4r;
46、使障碍物往右偏移0.2m,测量此时障碍物距固态激光雷达的距离记为真实值,多次测量得到真实值集合c3r;
47、根据真实值集合c3l和真实值集合c3r计算欧几里得聚类条件下三种不同位置距离真实值的平均值t2avg;
48、根据估计值集合c4l和估计值集合c4r计算欧几里得聚类条件下三种不同位置距离估计的平均值e2avg;
49、采用欧几里得聚类后获得距离的测量误差σ2。
50、进一步的,距离的测量误差σ2为:
51、σ2=(e2avg-t2avg)/t2avg。
52、
53、与现有技术相比,本发明至少具有以下有益效果:
54、一种无人驾驶小车前方障碍物距离测量方法,采用多次测量的方法求取平均值,并使用欧几里得聚类方法,得出距离,提高了距离测量的精确性。
55、进一步的,在测量距离时。多次变化障碍物与固态激光雷达的位置,但是始终保持障碍物在聚类的框内。
56、综上所述,本发明极大提高了测距的准确性。
57、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种无人驾驶小车前方障碍物距离测量方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的无人驾驶小车前方障碍物距离测量方法,其特征在于,步骤s1中,激光雷达的入射光垂直入射障碍物。
3.根据权利要求1所述的无人驾驶小车前方障碍物距离测量方法,其特征在于,步骤s4具体为:
4.根据权利要求3所述的无人驾驶小车前方障碍物距离测量方法,其特征在于,步骤s401具体为:
5.根据权利要求3所述的无人驾驶小车前方障碍物距离测量方法,其特征在于,步骤s402具体为:
6.根据权利要求5所述的无人驾驶小车前方障碍物距离测量方法,其特征在于,距离的测量误差为σ1为:
7.根据权利要求3所述的无人驾驶小车前方障碍物距离测量方法,其特征在于,步骤s403中,将固态激光雷达的三维点云数据划分为一块块的障碍物点云簇,提取前方障碍物的点云信息,计算得到的前方障碍物距离信息d,通过话题发布的方式,将激光雷达到前方障碍物的点云信息进行发布。
8.根据权利要求7所述的无人驾驶小车前方障碍物距离测量方法,其特征在于,聚类后点云簇x轴方向的形心坐标x为:
9.根据权利要求1所述的无人驾驶小车前方障碍物距离测量方法,其特征在于,步骤s404具体为:
10.根据权利要求9所述的无人驾驶小车前方障碍物距离测量方法,其特征在于,距离的测量误差σ2为:
技术总结
本发明公开了一种无人驾驶小车前方障碍物距离测量方法,调节无人驾驶小车车头的固态激光雷达,使得固态激光雷达与目标障碍物在一条竖直线上;测量雷达与障碍物的距离并作为距离真实值S<subgt;t</subgt;;重复得到多个距离真实值S<subgt;t</subgt;构建得到真实距离集合C<subgt;1</subgt;,多次订阅激光雷达的节点话题,得到估计值集合C<subgt;2</subgt;;变换障碍物的横向位置,对真实距离集合C<subgt;1</subgt;和估计值集合C<subgt;2</subgt;,基于点云聚类处理获取得到真实距离集合C<subgt;3</subgt;和估计值集合C<subgt;4</subgt;;将得到的真实距离集合C<subgt;3</subgt;和估计值集合C<subgt;4</subgt;进行比较,得到准确距离。本发明解决固态激光雷达易受外界干扰,以及固态激光雷达测距时固定视场角度的技术问题,能够提高获取的测距准度和鲁棒性。
技术研发人员:杜海林,仝秋红,王怡萌,张杭铖,王齐超,米奕桦,高飞,刘大鹏,张武,苏海东,潘龙
受保护的技术使用者:长安大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!