一种用于钢管混凝土拱结构脱空定位的智能机器人系统的制作方法
本发明属于机器人,特别涉及一种用于钢管混凝土拱结构脱空定位的智能机器人系统。
背景技术:
1、钢管混凝土拱桥及以钢管混凝土拱为骨架的混凝土拱桥近年来发展迅猛,持续引领着大跨拱桥的发展方向。钢管混凝土是一种性能优异的组合结构,但是由于受材料、工艺和环境等因素的影响,容易产生脱空缺陷,降低钢管混凝土拱桥的服役性能,对桥梁结构的安全影响不可忽视。因而必须建立相应的检测方法和系统。
2、钢管混凝土拱结构大多位于复杂山区环境,服役条件艰苦,传统的人工检测存在精度和效率低下、安全风险高等问题。目前,现有技术以爬壁机器人敲击代替人工完成敲击,通过爬壁机器人爬升后对检测目标进行锤击,再设置录音口完成声音采集,将声音信号转化为电信号进行脱空判断,但由于声频信号受外界噪音影响,存在检测精度不够等问题;超声波检测技术的精度相对较高,但与机器人技术的结合需要携带双探头且探头附壁,检测效率不高,还未见在钢管混凝土拱结构上有效应用。超声波技术与爬壁机器人的结合还需要进一步完善。无损检测技术中的冲击-回波技术与机器人技术结合用于钢管混凝土脱空病害快速定位检测是一个科学合理并具备广阔应用前景的方向。
技术实现思路
1、本发明的目的在于克服现有技术中声波法、超声波法与机器人技术结合实现钢管混凝土脱空无损检测所存在的检测效率和精度不足的问题,提供一种用于钢管混凝土拱结构脱空定位的智能机器人系统,将钢管混凝土脱空无损检测方法中的冲击-回波技术与爬壁机器人相结合,降低对检测环境要求的同时,显著提高钢管混凝土脱空无损检测的检测效率和检测精度。
2、为了实现上述发明目的,本发明提供了以下技术方案:
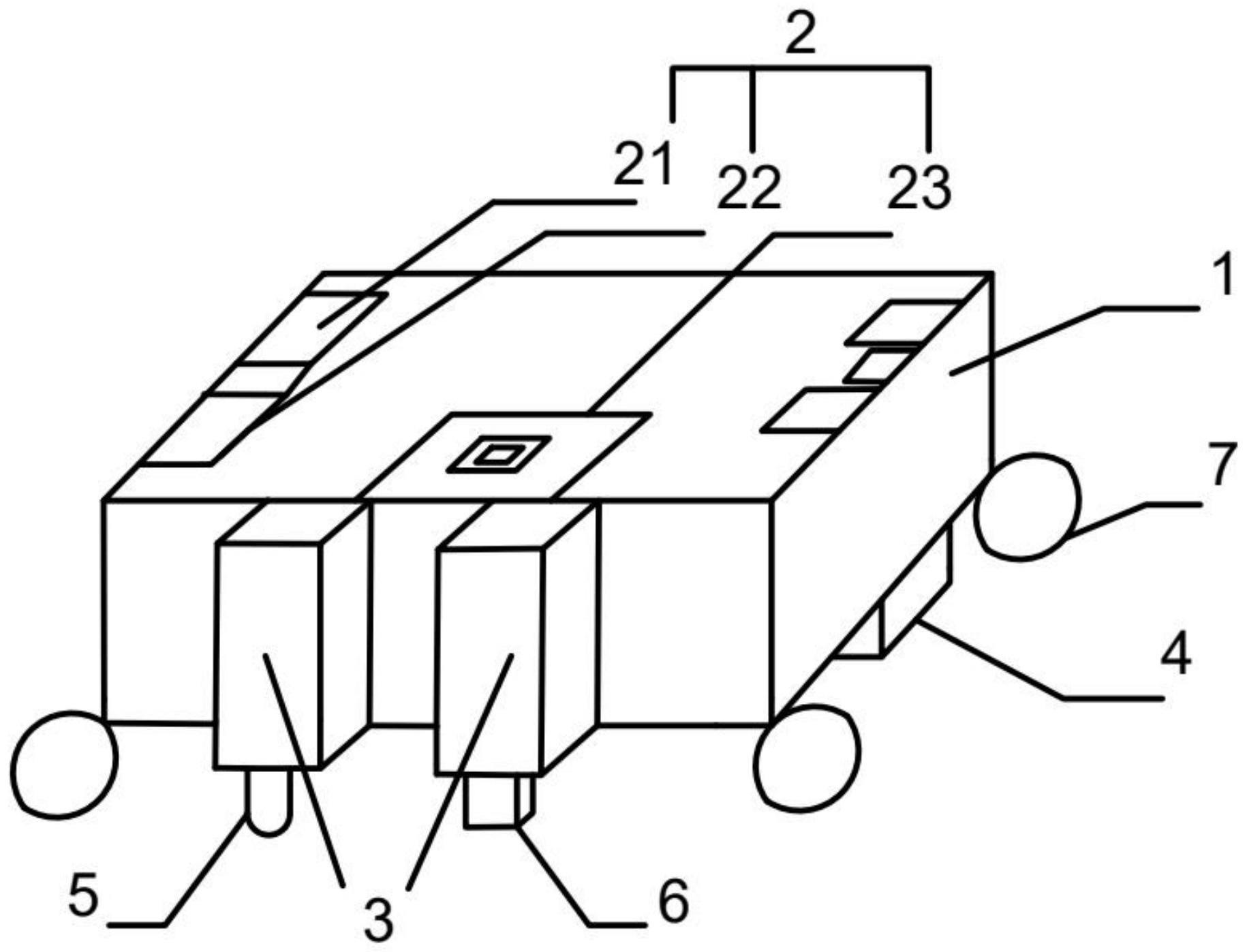
3、一种用于钢管混凝土拱结构脱空定位的智能机器人系统,所述智能机器人系统包括机器人主体、智能控制系统、伸缩调节装置、吸附装置、振动锤和信号接收传感器;
4、所述机器人主体底部四角固定连接麦克纳姆轮,所述麦克纳姆轮用于机器人的移动;
5、所述智能控制系统连接于所述机器人主体顶部;
6、所述吸附装置包括永磁铁和用于保护所述永磁铁的保护壳,所述吸附装置连接于所述机器人主体底部;
7、所述伸缩调节装置包括第一智能伸缩杆和第二智能伸缩杆,所述第一智能伸缩杆和所述第二智能伸缩杆均连接于所述机器人主体的同一侧边;
8、所述振动锤连接于所述第一智能伸缩杆底部;
9、所述信号接收传感器连接于所述第二智能伸缩杆底部。
10、进一步地,所述伸缩调节装置包括伸缩调节主控中心、中间传动装置、末端输出装置和位置传感器,所述中间传动装置连接于所述伸缩调节主控中心底部,所述末端输出装置一端连接于所述中间传动装置,另一端连接所述位置传感器,所述伸缩调节装置收缩状态如图2所示,所述伸缩调节主控中心根据所述位置传感器实时反馈其所连接的所述振动锤或所述信号接收传感器与桥面的距离,控制所述中间传动装置转动,以带动所述末端输出装置的伸缩,完成所述振动锤的敲击和所述信号接受传感器的附壁,所述伸缩调节装置伸展状态如图3所示。
11、进一步地,所述振动锤与所述信号接收传感器之间的距离为6cm,所述振动锤与所述信号接收传感器应尽可能保持较近的距离,以保证接收到的应力波的完整度和精确度,同时为避免所述第一智能伸缩杆和所述第二智能伸缩杆在运作时互相干扰,所述振动锤与所述信号接收传感器的距离设置为6cm。
12、进一步地,智能控制系统包括pcm-9389主板、can通讯卡和信号识别装置,所述can通讯卡与所述pcm-9389主板连接,所述pcm-9389主板通过所述can通讯卡驱动所述麦克纳姆轮和所述伸缩调节装置工作,实现所述机器人主体移动,所述pcm-9389主板通过pc104总线与所述can通讯卡相结合,所述can通讯卡通过can总线与所述麦克纳姆轮和所述伸缩调节装置相连,驱动所述麦克纳姆轮和所述伸缩调节装置工作。
13、进一步地,所述吸附装置数量设置为2,分别连接于所述机器人主体底部异于所述伸缩调节装置的两侧的所述麦克纳姆轮中间。
14、进一步地,所述永磁铁采用吸附力为105n-115n的钕铁硼,钕铁硼磁力大并且材质轻,所述钕铁硼的磁力和自身重量可使所述使机器人主体在钢管混凝土拱结构的任意位置移动时,既可以快速移动,也可以稳固的附着。
15、进一步地,所述中间传动装置为行星齿轮减速机构,行星齿轮减速机构的传动效率高,所述末端输出装置为梯形螺纹机构,梯形螺纹机构可将所述末端输出装置的圆周运动转化为直线运动,获得较大的轴向力,提高所述末端输出装置的运动效率,从而提高所述伸缩调节装置的传动效率。
16、本发明还提供了上述一种用于钢管混凝土拱结构脱空定位的智能机器人系统的检测方法,包括以下步骤:
17、s1,远端控制处理平台将移动命令发送至所述智能控制系统,所述智能控制系统控制所述机器人主体移动到达指定测点,到达所述指定测点后停止移动,通过所述吸附装置使所述机器人主体稳固于待测钢管混凝土拱桥上;
18、s2,当所述机器人主体稳定于所述指定测点后,远程控制系统发出检测指令至所述伸缩调节主控中心,所述伸缩调节主控中心控制所述中间传动装置转动,所述中间传动装置带动所述末端输出装置伸缩运动,完成所述振动锤对所述指定测点的敲击和所述信号接收传感器的附壁;
19、s3,所述信号接收传感器接收到由所述振动锤敲击反射回来的应力波信号后,将所述应力波传入信号识别装置,所述信号识别装置完成对所述应力波信号的识别,并将识别信息反馈至无线控制中心;
20、s4,对多个指定测点重复步骤s1-s3,直至对整个钢管混凝土拱桥完成脱空定位检测。
21、进一步地,所述智能伸缩杆伸缩调节主控中心控制所述伸缩调节装置运动的具体方式为:基于所述位置传感器反馈所述伸缩调节装置与桥面的距离,控制所述第二智能伸缩杆伸长,使得所述信号接收传感器完全贴壁,并保持所述信号接收传感器贴壁状态,此时再控制所述第一智能伸缩杆反复伸缩,使所述振动锤完成对所述指定测点的敲击,产生应力波并由所述信号接收传感器接收。
22、与现有技术相比,本发明的有益效果:
23、本发明的一种用于钢管混凝土拱结构脱空定位的智能机器人系统适用于钢管混凝土拱桥等人工检测危险性较大的检测环境,无需搭设支架或辅助机械配合人工检测,可实现远程控制、消除检测人员的安全风险。同时,本发明实现了冲击-回波技术和爬壁机器人的结合,可以更快速、简便和有效地对钢管混凝土结构的脱空病害进行全结构巡检和指定测点重点检测,极大地提高了钢管混凝土脱空无损检测效率和精度。
技术特征:
1.一种用于钢管混凝土拱结构脱空定位的智能机器人系统,其特征在于,所述智能机器人系统包括机器人主体(1)、智能控制系统(2)、伸缩调节装置(3)、吸附装置(4)、振动锤(5)和信号接收传感器(6);
2.如权利要求1所述的一种用于钢管混凝土拱结构脱空定位的智能机器人系统,其特征在于,所述伸缩调节装置(3)包括伸缩调节伸缩调节主控中心(31)、中间传动装置(32)、末端输出装置(33)和位置传感器(34),所述中间传动装置(32)连接于所述伸缩调节主控中心(31)底部,所述末端输出装置(33)一端连接于所述中间传动装置(32),另一端连接所述位置传感器(34)。
3.如权利要求2所述的一种用于钢管混凝土拱结构脱空定位的智能机器人系统,其特征在于,所述中间传动装置(32)为行星齿轮,所述末端输出装置(33)为梯形螺纹结构。
4.如权利要求1所述的一种用于钢管混凝土拱结构脱空定位的智能机器人系统,其特征在于,所述振动锤(5)与所述信号接收传感器(6)之间的距离为6cm。
5.如权利要求1所述的一种用于钢管混凝土拱结构脱空定位的智能机器人系统,其特征在于,智能控制系统(2)包括pcm-9389主板(21)、can通讯卡(22)和信号识别装置(23),所述can通讯卡(22)与所述pcm-9389主板(21)连接,所述pcm-9389主板(21)通过所述can通讯卡(22)驱动所述麦克纳姆轮(7)和所述伸缩调节装置(3)工作。
6.如权利要求1所述的一种用于钢管混凝土拱结构脱空定位的智能机器人系统,其特征在于,所述吸附装置(5)数量设置为2,分别连接于所述机器人主体(1)底部异于所述伸缩调节装置(4)的两侧的所述麦克纳姆轮(7)中间。
7.如权利要求1所述的一种用于钢管混凝土拱结构脱空定位的智能机器人系统,其特征在于,所述吸附装置(4)的永磁铁采用吸附力为105n-115n的钕铁硼。
8.如权利要求5所述的一种用于钢管混凝土拱结构脱空定位的智能机器人系统,其特征在于,还包括通过冲击-回波技术检测脱空缺陷以及预测缺陷高度的方法,具体步骤包括:
9.一种用于钢管混凝土拱结构脱空定位的智能机器人系统的检测方法,其特征在于,包括以下步骤:
10.如权利要求9所述的一种用于钢管混凝土拱结构脱空定位的智能机器人系统的检测方法,其特征在于,所述智能伸缩杆伸缩调节主控中心(21)控制所述伸缩调节装置(3)运动的具体方式为:基于所述位置传感器(34)反馈所述伸缩调节装置(3)与桥面的距离,控制所述第二智能伸缩杆伸长,使得所述信号接收传感器(6)完全贴壁,并保持所述信号接收传感器(6)贴壁状态,此时再控制所述第一智能伸缩杆反复伸缩,使所述振动锤(5)完成对所述指定测点的敲击,产生应力波并由所述信号接收传感器(6)接收。
技术总结
本发明公开了一种用于钢管混凝土拱结构脱空定位的智能机器人系统,包括机器人主体、智能控制系统、伸缩调节装置、吸附装置、振动锤和信号接收传感器;所述吸附装置使所述机器人主体附着于钢管混凝土拱结构;所述振动锤和所述信号接收传感器分开连接于不同的伸缩调节装置,所述振动锤通过伸缩调节装置进行敲击产生应力波信号,所述信号接收传感器接收所述应力波信号并传送给所述智能控制系统。本发明还公开了一种用于钢管混凝土拱结构脱空定位的智能机器人系统的检测方法。本发明实现远程控制爬壁机器人移动并开展脱空无损检测,代替了人工检测,同时实现了冲击‑回波技术和爬壁机器人的结合,可以更高效的进行脱空无损检测。
技术研发人员:王建军,安永辉,马晨宁,李军,莫友君,刘家兴
受保护的技术使用者:广西路桥工程集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!