行车路线偏离判定方法和装置与流程
本申请涉及计算机,具体涉及一种行车路线偏离判定方法和装置。
背景技术:
1、传统行车路线偏离判定方法,一般是由卫星定位装置将车辆的实时位置传输至后台服务器,后台服务器记录车辆当前位置,然后根据车辆行驶过程中记录的点位,生成车辆的实际运行线路,后将实际运行线路与预设线路进行对比,识别车辆是否偏离预设线路。
2、但传统方法是当出现偏离点即判定车辆发生偏离,忽略了偶发的点位漂移或由于突发原因造成的暂时偏离情况,导致判断准确度不足。
技术实现思路
1、本申请实施例提供一种行车路线偏离判定方法和装置,用以解决传统方法当出现偏离点即判定车辆发生偏离,忽略了偶发的点位漂移或由于突发原因造成的暂时偏离情况,导致判断准确度不足的技术问题。
2、第一方面,本申请实施例提供一种行车路线偏离判方法,包括:
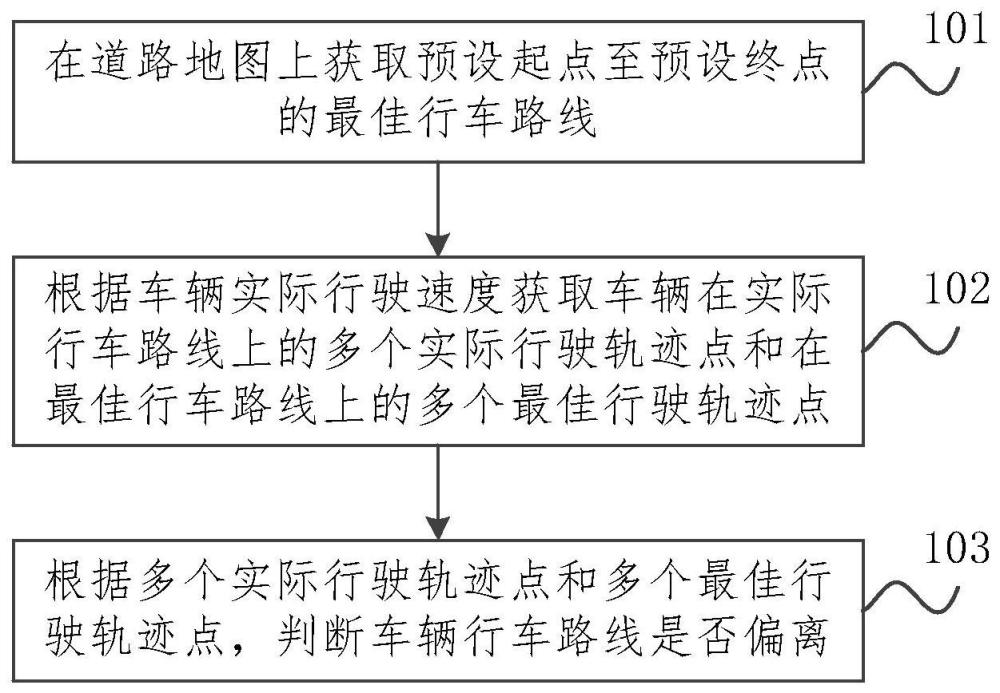
3、在道路地图上获取预设起点至预设终点的最佳行车路线;所述最佳行车路线根据路线总长度和路线所经过的红绿灯数量得到;
4、根据车辆实际行驶速度获取车辆在实际行车路线上的多个实际行驶轨迹点和在最佳行车路线上的多个最佳行驶轨迹点;所述实际行驶轨迹点和所述最佳行驶轨迹点在任一采样时刻一一对应,所述实际行驶轨迹点包括实际起点,所述最佳行驶轨迹点包括预设起点;
5、根据所述多个实际行驶轨迹点和所述多个最佳行驶轨迹点,判断车辆行车路线是否偏离。
6、在一个实施例中,所述根据所述多个实际行驶轨迹点和所述多个最佳行驶轨迹点,判断车辆行车路线是否偏离,包括:
7、根据连续两个采样时刻的实际行驶轨迹点与最佳行驶轨迹点,判断是否发出第一疑似偏离警告;
8、若发出第一疑似偏离警告,则根据所述连续两个采样时刻的车辆偏离夹角,判断是否发出第二疑似偏离警告或第三疑似偏离警告;所述第二疑似偏离警告的预警范围大于所述第一疑似偏离警告的预警范围,所述第三疑似偏离警告的预警范围大于所述第二疑似偏离警告的预警范围,所述第二疑似偏离警告的预警级别大于所述第一疑似偏离警告的预警级别,所述第三疑似偏离警告的预警级别大于所述第二疑似偏离警告的预警级别;
9、若发出第二疑似偏离警告或第三疑似偏离警告,则根据所述连续两个采样时刻的车辆偏离距离,判断车辆行车路线是否偏离。
10、在一个实施例中,所述根据连续两个采样时刻的实际行驶轨迹点与最佳行驶轨迹点,判断是否发出第一疑似偏离警告,包括:
11、若连续两个采样时刻的实际行驶轨迹点与最佳行驶轨迹点不一致,则发出第一疑似偏离警告。
12、在一个实施例中,所述根据所述连续两个采样时刻的车辆偏离夹角,判断是否发出第二疑似偏离警告或第三疑似偏离警告,包括:
13、所述连续两个采样时刻是第一采样时刻和第二采样时刻,所述第二采样时刻是所述第一采样时刻的后一采样时刻;
14、获取预设起点至其他最佳行驶轨迹点之间的直线线段,得到多条第一直线线段;
15、获取预设起点至实际起点之外的实际行驶轨迹点之间的直线线段,得到多条第二直线线段;
16、若第一车辆偏离夹角小于或等于夹角阈值,且第二车辆偏离夹角大于夹角阈值,则发出第二疑似偏离警告;所述第一车辆偏离夹角是所述第一采样时刻的实际行驶轨迹点对应的第二直线线段,与所述第一采样时刻的最佳行驶轨迹点对应的第一直线线段之间的夹角,所述第二车辆偏离夹角是所述第二采样时刻的实际行驶轨迹点对应的第二直线线段,与所述第二采样时刻的最佳行驶轨迹点对应的第一直线线段之间的夹角;
17、若第一车辆偏离夹角和第二车辆偏离夹角均大于夹角阈值,且第一车辆偏离夹角小于第二车辆偏离夹角,则发出第三疑似偏离警告。
18、在一个实施例中,所述根据所述连续两个采样时刻的车辆偏离距离,判断车辆行车路线是否偏离,包括:
19、所述连续两个采样时刻是第一采样时刻和第二采样时刻,所述第二采样时刻是所述第一采样时刻的后一采样时刻;
20、获取实际起点至其他实际行驶轨迹点之间的直线距离,得到多个第一直线距离;
21、获取实际起点至预设起点之间的直线距离,得到第二直线距离;
22、若第一车辆偏离距离或第二车辆偏离距离与所述第二直线距离之间的比值大于比值阈值,则确定车辆行车路线发生偏离,并发出偏离警告;所述第一车辆偏离距离是所述第一采样时刻的实际行驶轨迹点对应的第一直线距离,所述第二车辆偏离距离是所述第二采样时刻的实际行驶轨迹点对应的第一直线距离,所述偏离警告的预警范围大于所述第三疑似偏离警告的预警范围,所述偏离警告的预警级别大于所述第三疑似偏离警告的预警级别。
23、第二方面,本申请实施例提供一种行车路线偏离判定装置,包括:
24、最佳行车路线获取模块,用于:在道路地图上获取预设起点至预设终点的最佳行车路线;所述最佳行车路线根据路线总长度和路线所经过的红绿灯数量得到;
25、轨迹点获取模块,用于:根据车辆实际行驶速度获取车辆在实际行车路线上的多个实际行驶轨迹点和在最佳行车路线上的多个最佳行驶轨迹点;所述实际行驶轨迹点和所述最佳行驶轨迹点在任一采样时刻一一对应,所述实际行驶轨迹点包括实际起点,所述最佳行驶轨迹点包括预设起点;
26、偏离判定模块,用于:根据所述多个实际行驶轨迹点和所述多个最佳行驶轨迹点,判断车辆行车路线是否偏离。
27、第三方面,本申请实施例提供一种电子设备,包括处理器和存储有计算机程序的存储器,所述处理器执行所述程序时实现第一方面所述的行车路线偏离判定方法的步骤。
28、第四方面,本申请实施例提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现第一方面所述的行车路线偏离判定方法的步骤。
29、本申请提供的行车路线偏离判定方法和装置,在道路地图上获取预设起点至预设终点的最佳行车路线;根据车辆实际行驶速度获取车辆在实际行车路线上的多个实际行驶轨迹点和在最佳行车路线上的多个最佳行驶轨迹点;根据多个实际行驶轨迹点和多个最佳行驶轨迹点,判断车辆行车路线是否偏离。由于采用多个实际行驶轨迹点和多个最佳行驶轨迹点的联合判定方式,避免了传统判断方式中根据孤立的偏离点进行车辆行车偏离判定的偶发性和突发性因素,提高了判定的准确性。
技术特征:
1.一种行车路线偏离判定方法,其特征在于,包括:
2.根据权利要求1所述的行车路线偏离判定方法,其特征在于,所述根据所述多个实际行驶轨迹点和所述多个最佳行驶轨迹点,判断车辆行车路线是否偏离,包括:
3.根据权利要求2所述的行车路线偏离判定方法,其特征在于,所述根据连续两个采样时刻的实际行驶轨迹点与最佳行驶轨迹点,判断是否发出第一疑似偏离警告,包括:
4.根据权利要求2所述的行车路线偏离判定方法,其特征在于,所述根据所述连续两个采样时刻的车辆偏离夹角,判断是否发出第二疑似偏离警告或第三疑似偏离警告,包括:
5.根据权利要求2所述的行车路线偏离判定方法,其特征在于,所述根据所述连续两个采样时刻的车辆偏离距离,判断车辆行车路线是否偏离,包括:
6.一种行车路线偏离判定装置,其特征在于,包括:
7.一种电子设备,包括处理器和存储有计算机程序的存储器,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至5任一项所述的行车路线偏离判定方法的步骤。
8.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至5任一项所述的行车路线偏离判定方法的步骤。
技术总结
本申请涉及计算机技术领域,提供一种行车路线偏离判定方法和装置。所述方法包括:在道路地图上获取预设起点至预设终点的最佳行车路线;根据车辆实际行驶速度获取车辆在实际行车路线上的多个实际行驶轨迹点和在最佳行车路线上的多个最佳行驶轨迹点;根据所述多个实际行驶轨迹点和所述多个最佳行驶轨迹点,判断车辆行车路线是否偏离。本申请实施例提供的行车路线偏离判定方法和装置由于采用多个实际行驶轨迹点和多个最佳行驶轨迹点的联合判定方式,避免了传统判断方式中根据孤立的偏离点进行车辆行车偏离判定的偶发性和突发性因素,提高了判定的准确性。
技术研发人员:王建永,林超,郑杰生,吴鹏毅,吴天磊
受保护的技术使用者:南方电网数字企业科技(广东)有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!