一种基于三角波干涉的SAL振动误差补偿方法
本发明属于高分辨率sal成像,具体涉及一种基于三角波干涉的sal振动误差补偿方法。
背景技术:
1、合成孔径激光雷达是合成孔径技术与激光雷达技术相结合的新型雷达系统是合成孔径技术在光学频段的拓展,其理论分辨率不随探测距离的增加而下降。相比于微波信号,激光波束窄、能量集中、合成孔径时间短、频率特性接近可见光,因此,sal(激光合成孔径雷达)具备高分辨率、高数据率、精细化成像能力。
2、然而,激光信号的波长在微米量级,相干探测机制对振动非常敏感,机载平台微米量级的振动会在回波信号中引入较大的多普勒频移,降低了sal的高分辨成像能力。对于平台运动传感器而言,微米量级的振动是普遍存在且不易测量的,所以振动误差的估计与补偿是sal成像的关键问题之一。针对sal成像中误差的估计与补偿问题,目前多采用三类方法解决,包括,基于传感器的运动误差补偿方法、基于系统设计的振动误差补偿方法和基于信号处理的振动误差补偿方法。
3、其中,基于传感器的运动误差补偿方法的补偿精度依赖于pos(position andorientation system,定位定姿系统)系统的精度,而高精度pos系统的成本较高、重量相对较大,安装在机载平台上时需要综合考虑此类因素。此外,激光雷达波长较短,微米量级的振动都能产生相应的测距误差。pos系统能够初步补偿机载平台整体运动误差,但是难以捕捉到细微的振动误差。
4、基于系统设计的振动误差补偿方法需要增加额外的通道或改变硬件设备,同时会对机载平台雷达系统增加系统复杂度。
5、基于信号处理的振动误差补偿方法不需要改变系统设计,降低了硬件设计复杂度和成本。主要有三类代表方法:空间相关法主要适用于具有高脉冲重复频率的雷达发射信号。pga及其改进算法主要适用于无跨距离门徙动的场景。但是通常激光雷达的成像分辨率较高,振动误差在高分辨率条件下,不仅会产生方位向散焦,还会导致跨距离门徙动现象,导致pga算法效果欠佳。子孔径方法假设各子孔径时间内的振动速度误为匀速,不能估计每个脉冲的振动速度,限制了误差补偿精度。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种基于三角波干涉的sal振动误差补偿方法。本发明要解决的技术问题通过以下技术方案实现:
2、本发明提供了一种基于三角波干涉的sal振动误差补偿方法,包括:
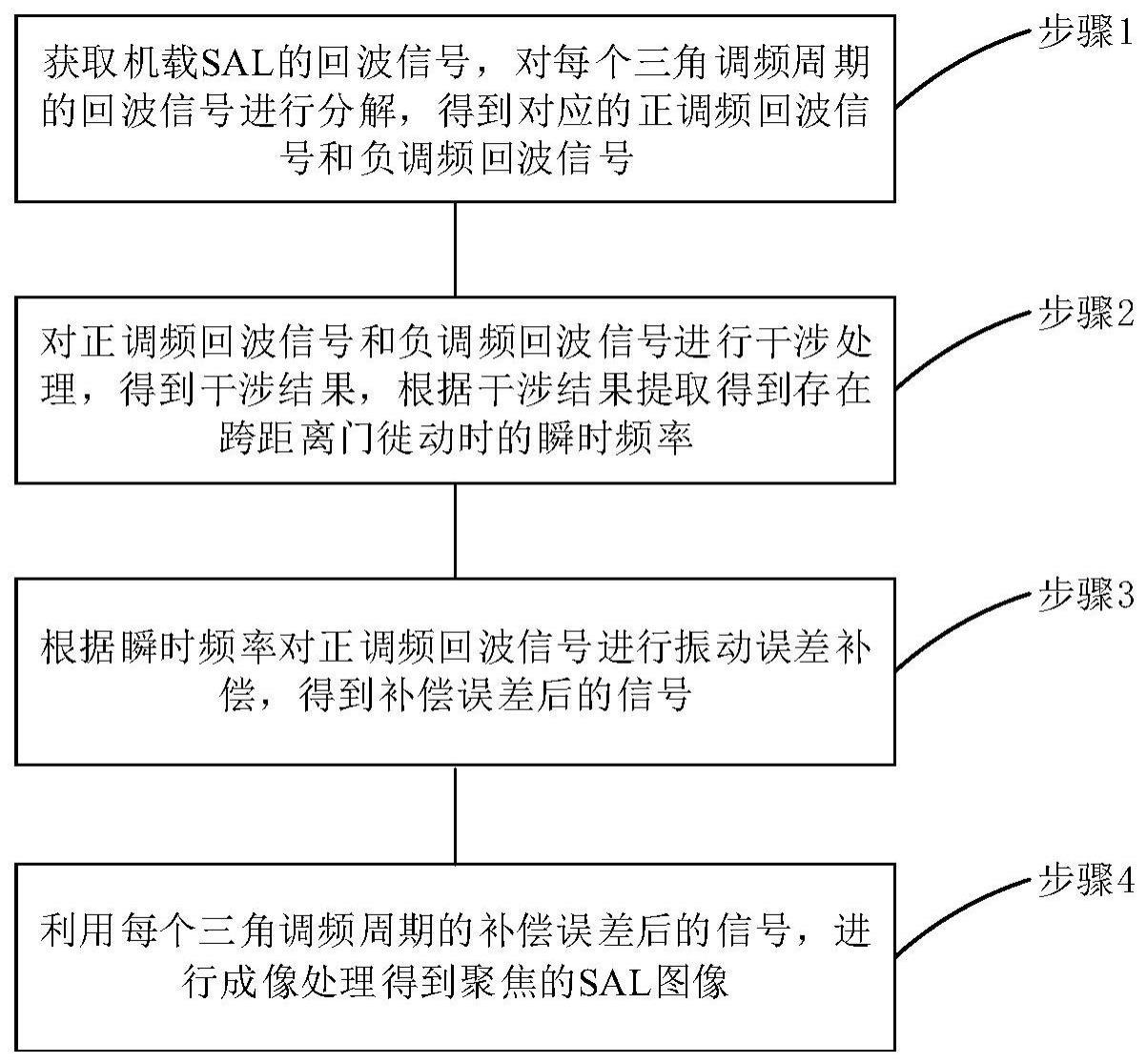
3、步骤1:获取机载sal的回波信号,对每个三角调频周期的回波信号进行分解,得到对应的正调频回波信号和负调频回波信号,其中,所述机载sal的发射信号为三角调频连续波;
4、步骤2:对所述正调频回波信号和所述负调频回波信号进行干涉处理,得到干涉结果,根据所述干涉结果提取得到存在跨距离门徙动时的瞬时频率;
5、步骤3:根据所述瞬时频率对所述正调频回波信号进行振动误差补偿,得到补偿误差后的信号;
6、步骤4:利用每个三角调频周期的补偿误差后的信号,进行成像处理得到聚焦的sal图像。
7、与现有技术相比,本发明的有益效果在于:
8、1.本发明的基于三角波干涉的sal振动误差补偿方法,相比于pos传感器补偿的运动误差,能够捕捉到细微的振动误差,适用于对振动敏感的sal信号;
9、2.本发明的基于三角波干涉的sal振动误差补偿方法,在数据域完成振动误差补偿,不需要增加额外的通道,降低了硬件设计复杂度,有利于系统轻量化设计;
10、3.本发明的基于三角波干涉的sal振动误差补偿方法,根据t-fmcw(三角调频连续波)信号频谱对称特性及振动相位历程引入的时频信息,可消除振动误差引入的跨距离门徙动和方位相位误差。
11、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
技术特征:
1.一种基于三角波干涉的sal振动误差补偿方法,其特征在于,包括:
2.根据权利要求1所述的基于三角波干涉的sal振动误差补偿方法,其特征在于,在一个三角调频周期内,所述正调频回波信号和所述负调频回波信号,表示为:
3.根据权利要求2所述的基于三角波干涉的sal振动误差补偿方法,其特征在于,所述步骤2包括:
4.根据权利要求3所述的基于三角波干涉的sal振动误差补偿方法,其特征在于,所述复数相乘的干涉信号和所述共轭相乘的干涉信号,表示为:
5.根据权利要求3所述的基于三角波干涉的sal振动误差补偿方法,其特征在于,所述步骤2.2包括:
6.根据权利要求5所述的基于三角波干涉的sal振动误差补偿方法,其特征在于,根据所述复数相乘的干涉信号提取得到第一瞬时频率,根据所述共轭相乘的干涉信号提取得到第二瞬时频率,根据所述第一瞬时频率和所述第二瞬时频率得到存在跨距离门徙动时的瞬时频率,包括:
7.根据权利要求1所述的基于三角波干涉的sal振动误差补偿方法,其特征在于,所述步骤3包括:
8.根据权利要求7所述的基于三角波干涉的sal振动误差补偿方法,其特征在于,所述振动误差补偿滤波器,表示为:
技术总结
本发明涉及一种基于三角波干涉的SAL振动误差补偿方法,包括:步骤1:获取机载SAL的回波信号,对每个三角调频周期的回波信号进行分解,得到对应的正调频回波信号和负调频回波信号,其中,机载SAL的发射信号为三角调频连续波;步骤2:对正调频回波信号和负调频回波信号进行干涉处理,得到干涉结果,根据干涉结果提取得到存在跨距离门徙动时的瞬时频率;步骤3:根据瞬时频率对正调频回波信号进行振动误差补偿,得到补偿误差后的信号;步骤4:利用每个三角调频周期的补偿误差后的信号,进行成像处理得到聚焦的SAL图像。本发明的方法,能够捕捉到细微的振动误差,降低了硬件设计复杂度,有利于系统轻量化设计。
技术研发人员:王蓉蓉,刘宏伟,纠博,党旭东,贾天一
受保护的技术使用者:西安电子科技大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!