基于车道线的移动路侧感知基站检测区域的自动调整方法
本发明属于路侧感知设备,涉及一种基于车道线的移动路侧感知基站检测区域的自动调整方法。
背景技术:
1、现有的路侧感知设备分为两种,一种是安装在路侧的l型支架上,由人工去调整位置和角度的路侧感知设备,一旦调试好之后路侧感知设备就会被固定下来,如图1所示;另一种是固定安装在移动小车上的路侧感知设备,由工作人员对其角度和方向进行调整,如图2所示。第一种的路侧感知设备通常适用于场景不变的固定路口,感知设备调试一次并进行固定即可。第二种的路侧感知设备则适用于临时性作业场景,例如,作为道路养护的防撞机器人、教学用的数据采集系统等。由于第二种的路侧感知设备面对的环境的多变性和不确定性,每一次使用之前,均需要工作人员对其进行角度和方向的调整,使用起来非常的不方便。
技术实现思路
1、针对上述技术问题,本发明的目的是提供一种基于车道线的移动路侧感知基站检测区域的自动调整方法,通过设置路侧感知基站的最佳视野区域即预设检测区域,并对车道线进行检测,判断车道线与预设检测区域之间的关系,从而对摄像头和激光雷达的姿态进行自动调整,使得路侧感知基站能够自动调整姿态进入最佳观测姿态,无需工作人员的参与,提高了位姿调整的效率和准确率。
2、为了实现上述目的,本发明提供了如下技术方案:
3、一种基于车道线的移动路侧感知基站检测区域的自动调整方法,所述移动路侧感知基站包括移动车体、交换机、边缘处理器、摄像头、激光雷达和检测器姿态调整装置;其中,所述交换机和边缘处理器置于移动车体的空腔内,所述摄像头和激光雷达通过检测器姿态调整装置并列安装在移动车体上;所述边缘处理器分别与交换机、检测器姿态调整装置、摄像头和激光雷达电连接;所述检测器姿态调整装置能够对摄像头和激光雷达的水平高度、水平角度和俯仰角度进行精确调整。所述自动调整方法包括如下步骤:
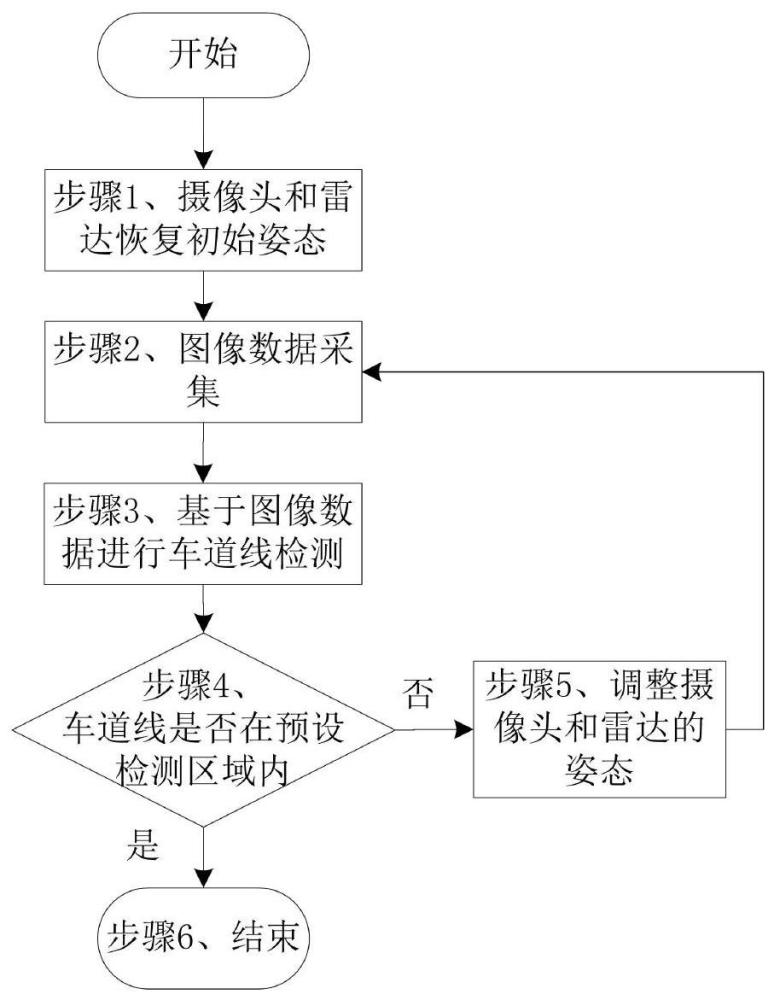
4、s1、恢复初始姿态;
5、启动移动路侧感知基站的检测器姿态调整装置,将摄像头和激光雷达的水平高度、水平角度和俯仰角度恢复至初始状态;
6、s2、数据采集;
7、通过摄像头或激光雷达对当前路段进行图像数据采集或点云数据采集,获得待检测数据;
8、s3、基于待检测数据进行车道线检测;
9、所述待检测数据为图像数据时,采用现有的边缘检测、色彩分割、滤波图像处理技术或深度学习方法来检测出图像中的车道线;
10、所述待检测数据为点云数据时,采用现有的点云聚类算法来检测出图像中的车道线;
11、s4、根据车道线调整摄像头和激光雷达的姿态;
12、s4.1、判断步骤s3检测到的车道线数量是否等于路段内所有车道的车道线数量之和;如果步骤s3检测到的车道线数量等于路段内所有车道的车道线数量之和,则进行下一步判断;否则,通过检测器姿态调整装置调整摄像头和激光雷达的姿态,并重复步骤s2~s4;
13、s4.2、判断步骤s3检测到的车道线中两条最外侧的车道线是否位于摄像头或激光雷达的最佳视野区域,即预设检测区域内;如果两条最外侧的车道线位于预设检测区域内,则进行下一步判断;否则,通过检测器姿态调整装置调整摄像头和激光雷达的姿态,并重复步骤s2~s4;
14、s4.3、判断步骤s3检测到的车道线中两条最外侧的车道线的中线与预设检测区域的中心点之间的距离是否小于距离阈值;如果两条最外侧的车道线的中线与预设检测区域的中心点之间的距离小于距离阈值,则进行下一步判断;否则,通过检测器姿态调整装置调整摄像头和激光雷达的姿态,并重复步骤s2~s4;
15、s4.4、判断步骤s3检测到的车道线中两条最外侧的车道线的中线与预设检测区域的中线之间的夹角是否小于角度阈值;如果两条最外侧的车道线的中线与预设检测区域的中线之间的夹角小于角度阈值,则自动调整方法结束;否则,通过检测器姿态调整装置调整摄像头和激光雷达的姿态,并重复步骤s2~s4。
16、所述步骤s2中,通过摄像头对当前路段进行图像数据采集时,采集多帧图像数据,从采集到的多帧图像数据中选择场景相对稳定的图像数据作为待检测数据。
17、所述步骤s4中,根据检测的误差要求,设定距离阈值和角度阈值。
18、所述步骤s4中,摄像头和激光雷达的姿态调整包括摄像头和激光雷达的水平高度、水平角度和俯仰角度调整;通过调整后的检测结果与上一次的检测结果进行对比,不断修正摄像头和激光雷达的姿态。
19、所述步骤s4.1中,当检测到的车道线数量小于路段内所有车道的车道线数量之和时,优先调整摄像头和激光雷达的水平高度。
20、所述步骤s4.2中,当车道线中两条最外侧的车道线未完全落入预设检测区域时,优先调整摄像头和激光雷达的水平高度。
21、所述步骤s4.3和s4.4中,优先调整摄像头和激光雷达的水平角度和/或俯仰角度。
22、所述步骤s4中,以一定预设距离步长调整摄像头和激光雷达的水平高度;以一定预设角度步长调整摄像头和激光雷达的水平角度和/或俯仰角度。
23、与现有技术相比,本发明的有益效果在于:
24、本发明通过设置路侧感知基站的最佳视野区域即预设检测区域,并对车道线进行检测,判断车道线与预设检测区域之间的关系,从而对摄像头和激光雷达的姿态进行自动调整,使得路侧感知基站能够自动调整姿态进入最佳观测姿态,无需工作人员的参与,提高了位姿调整的效率和准确率。
技术特征:
1.一种基于车道线的移动路侧感知基站检测区域的自动调整方法,所述移动路侧感知基站包括移动车体、交换机、边缘处理器、摄像头、激光雷达和检测器姿态调整装置;其中,所述交换机和边缘处理器置于移动车体的空腔内,所述摄像头和激光雷达通过检测器姿态调整装置并列安装在移动车体上;所述边缘处理器分别与交换机、检测器姿态调整装置、摄像头和激光雷达电连接;所述检测器姿态调整装置能够对摄像头和激光雷达的水平高度、水平角度和俯仰角度进行精确调整,其特征在于,所述自动调整方法包括如下步骤:
2.根据权利要求1所述的自动调整方法,其特征在于,所述步骤s2中,通过摄像头对当前路段进行图像数据采集时,采集多帧图像数据,从采集到的多帧图像数据中选择场景相对稳定的图像数据作为待检测数据。
3.根据权利要求1所述的自动调整方法,其特征在于,所述步骤s4中,根据检测的误差要求,设定距离阈值和角度阈值。
4.根据权利要求1所述的自动调整方法,其特征在于,所述步骤s4中,摄像头和激光雷达的姿态调整包括摄像头和激光雷达的水平高度、水平角度和俯仰角度调整;通过调整后的检测结果与上一次的检测结果进行对比,不断修正摄像头和激光雷达的姿态。
5.根据权利要求1所述的自动调整方法,其特征在于,所述步骤s4.1中,当检测到的车道线数量小于路段内所有车道的车道线数量之和时,优先调整摄像头和激光雷达的水平高度。
6.根据权利要求1所述的自动调整方法,其特征在于,所述步骤s4.2中,当车道线中两条最外侧的车道线未完全落入预设检测区域时,优先调整摄像头和激光雷达的水平高度。
7.根据权利要求1所述的自动调整方法,其特征在于,所述步骤s4.3和s4.4中,优先调整摄像头和激光雷达的水平角度和/或俯仰角度。
8.根据权利要求1所述的自动调整方法,其特征在于,所述步骤s4中,以一定预设距离步长调整摄像头和激光雷达的水平高度;以一定预设角度步长调整摄像头和激光雷达的水平角度和/或俯仰角度。
技术总结
本发明属于路侧感知设备技术领域,涉及一种基于车道线的移动路侧感知基站检测区域的自动调整方法。所述自动调整方法包括如下步骤:S1、恢复初始姿态;S2、数据采集;S3、基于待检测数据进行车道线检测;S4、根据车道线调整摄像头和激光雷达的姿态。本发明通过设置路侧感知基站的最佳视野区域即预设检测区域,并对车道线进行检测,判断车道线与预设检测区域之间的关系,从而对摄像头和激光雷达的姿态进行自动调整,使得路侧感知基站能够自动调整姿态进入最佳观测姿态,无需工作人员的参与,提高了位姿调整的效率和准确率。
技术研发人员:杜梓平,查艳芳,程曦浩,杨帆
受保护的技术使用者:苏州工业园区服务外包职业学院(苏州市服务外包人才培养实训中心)
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!