一种用于机械手感知物体可变形性的柔性触觉传感器
本发明涉及测量领域,尤其涉及的是一种用于机械手感知物体可变形性的柔性触觉传感器。
背景技术:
1、目前机器人的应用逐渐从工业场景扩展到日常生活场景,因此需要类似的触觉感知来达到人类水平的灵活性。在触觉感知中,变形相关属性的感知为区分、识别可变形物体以及制定适当的操作策略提供了有价值的触觉线索。在触觉感知领域的研究中,确定物体的可变形性尤其具有挑战性,因为它通常受到多个与变形相关的属性的影响,如杨氏模量、邵氏硬度和刚度。杨氏模量和邵氏硬度代表材料的固有可变形特性,而刚度描述的是物体对弹性变形的整体抵抗能力,这种抵抗能力受到各种因素的影响,包括物体尺寸、材料软硬度或可变形结构。日常生活中的可变形物体通常由可变形的材料和结构(如气球)或不同软硬度的材料(如橙子)组合而成。因此,在现实世界的非结构化环境中,实现机器人对可变形物体可变形性的感知需要多种变形属性的协同感知,如材料硬度、整体刚度等。
2、目前在机器人触觉感知领域,已经存在单独测量材料硬度的传感器,此种传感器通过一个1×3磁致伸缩触觉传感器来测量三个位点的压力,由于只能测量三个位点的压力,无法较为准确的测量材料硬度,也无法利用三个位点的压力数据对物体的整体刚度进行精准的计算,故无法较为准确的进行物体可变形性测量。
3、因此,现有技术存在缺陷,有待改进与发展。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种用于机械手感知物体可变形性的柔性触觉传感器,旨在解决现有技术中触觉传感器无法在测量材料硬度的同时测量整体刚度,无法较为准确的进行物体可变形性测量的问题。
2、本发明解决技术问题所采用的技术方案如下:
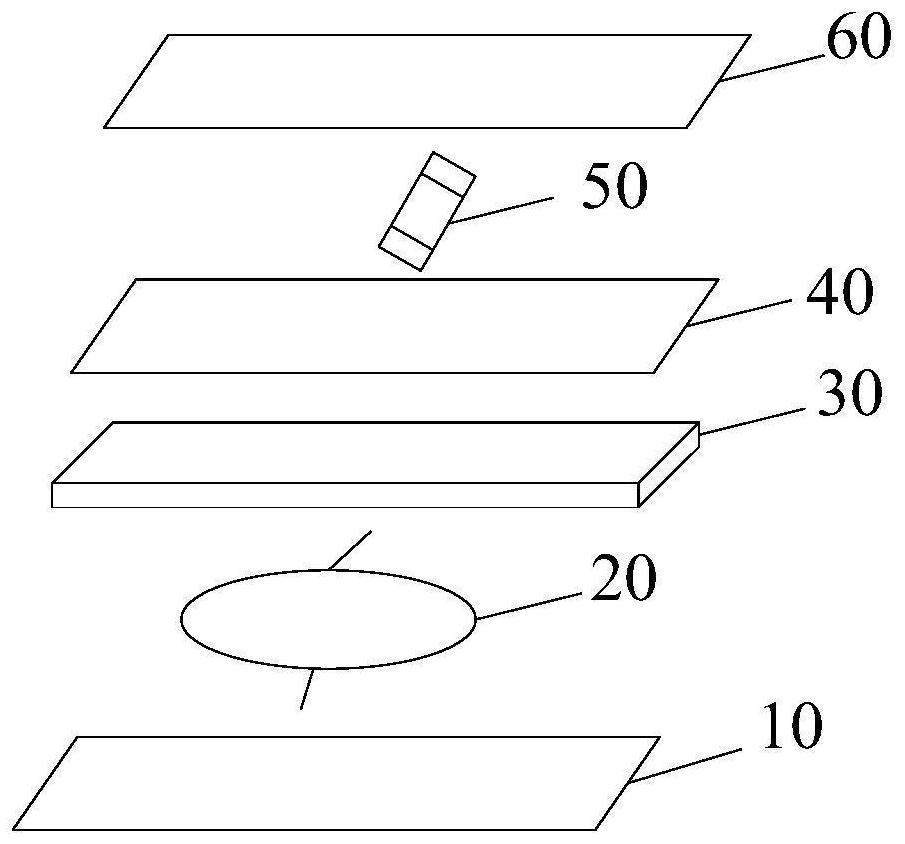
3、一种用于机械手感知物体可变形性的柔性触觉传感器,其中,包括:依次贴合连接的下柔性层、螺旋叉指电极、多孔压阻层、中间柔性层及上柔性层,所述上柔性层面向所述中间柔性层的一侧设置有还原氧化石墨烯层,所述还原氧化石墨烯层背离所述上柔性层的一侧与所述中间柔性层贴合连接。
4、进一步地,所述多孔压阻层是由导电填料、牺牲模板颗粒和弹性聚合物混合均匀后制得压阻片材,去除所述压阻片材中的牺牲模板颗粒后形成的。
5、进一步地,所述螺旋叉指电极面向所述多孔压阻层的一侧为裸露状态。
6、进一步地,所述还原氧化石墨烯层包括还原氧化石墨烯薄膜、涂覆在所述还原氧化石墨烯薄膜第一端的第一导电金属薄膜和涂覆在所述还原氧化石墨烯薄膜第二端的第二导电金属薄膜。
7、本发明还提供一种用于物体可变形性测量的测量方法,其中,包括:
8、获取利用如上所述的柔性触觉传感器进行物体可变形性测量所得的压力数据、应变数据,以及获取机械手的动觉数据;
9、将所述压力数据与预设接触压力进行比较,得到比较结果,根据所述比较结果确定机械手的当前状态;
10、当机械手处于接触状态时,根据所述动觉数据和所述压力数据得到待测物体的整体刚度的同时,根据所述压力数据和所述应变数据得到待测物体的材料硬度;
11、其中,所述柔性触觉传感器贴附于所述机械手表面。
12、进一步地,所述动觉数据包括不同时间点的待测物体的位移,所述压力数据包括不同时间点的压力值;所述根据所述动觉数据和所述压力数据得到待测物体的整体刚度,包括:
13、以所述位移作为横轴,以所述压力值作为纵轴,选取不同时间段对应的位移和压力值,生成位移-压力曲线;
14、对所述位移-压力曲线进行线性拟合,得到位移-压力曲线斜率,根据预设的所述位移-压力曲线斜率和整体刚度的对应关系得到待测物体的整体刚度。
15、进一步地,所述应变数据包括不同时间的应变值;所述根据所述压力数据和所述应变数据得到待测物体的材料硬度,包括:
16、利用时间滑动窗口截取所述压力数据和所述应变数据;
17、计算每个滑动时间窗口的信号特征;
18、将每个时间滑动窗口的所述信号特征输入已训练的多层感知器回归模型,得到待测物体的材料硬度。
19、进一步地,所述计算每个滑动时间窗口的信号特征,包括:
20、以所述应变值作为横轴,以所述压力值作为纵轴,选取不同时间段对应的应变值和压力值,生成应变-压力曲线,对所述应变-压力曲线进行线性拟合,得到应变-压力曲线斜率;
21、根据滑动时间窗口内的每个压力值得到压力平均值;
22、根据滑动时间窗口内的每个应变值得到应变平均值;
23、将应变-压力曲线斜率、压力平均值以及应变平均值作为每个滑动时间窗口的信号特征。
24、本发明还提供一种用于物体可变形性测量的设备,其中,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上进行运行的用于物体可变形性测量的测量程序,所述测量程序被所述处理器执行时实现如上所述的测量方法的步骤。
25、本发明还提供一种计算机可读存储介质,其中,所述计算机可读存储介质存储有计算机程序,所述计算机程序能够被执行以用于实现如上所述的测量方法的步骤。
26、本发明所提供的一种用于机械手感知物体可变形性的柔性触觉传感器,包括:依次贴合连接的下柔性层、螺旋叉指电极、多孔压阻层、中间柔性层及上柔性层,所述上柔性层面向所述中间柔性层的一侧设置有还原氧化石墨烯层,所述还原氧化石墨烯层背离所述上柔性层的一侧与所述中间柔性层贴合连接。本发明通过将多孔压阻层和还原氧化石墨烯层设置在同一触觉传感器中,实现了同时获取物体的压力数据和应变数据,进而可支持同时测量物体的材料硬度和整体刚度,可较为准确的进行物体可变形性测量。
技术特征:
1.一种用于机械手感知物体可变形性的柔性触觉传感器,其特征在于,包括:依次贴合连接的下柔性层、螺旋叉指电极、多孔压阻层、中间柔性层及上柔性层,所述上柔性层面向所述中间柔性层的一侧设置有还原氧化石墨烯层,所述还原氧化石墨烯层背离所述上柔性层的一侧与所述中间柔性层贴合连接。
2.根据权利要求1所述的用于机械手感知物体可变形性的柔性触觉传感器,其特征在于,所述多孔压阻层是由导电填料、牺牲模板颗粒和弹性聚合物混合均匀后制得压阻片材,去除所述压阻片材中的牺牲模板颗粒后形成的。
3.根据权利要求1所述的用于机械手感知物体可变形性的柔性触觉传感器,其特征在于,所述螺旋叉指电极面向所述多孔压阻层的一侧为裸露状态。
4.根据权利要求1所述的用于机械手感知物体可变形性的柔性触觉传感器,其特征在于,所述还原氧化石墨烯层包括还原氧化石墨烯薄膜、涂覆在所述还原氧化石墨烯薄膜第一端的第一导电金属薄膜和涂覆在所述还原氧化石墨烯薄膜第二端的第二导电金属薄膜。
5.一种用于物体可变形性测量的测量方法,其特征在于,包括:
6.根据权利要求5所述的测量方法,其特征在于,所述动觉数据包括不同时间点的待测物体的位移,所述压力数据包括不同时间点的压力值;所述根据所述动觉数据和所述压力数据得到待测物体的整体刚度,包括:
7.根据权利要求6所述的测量方法,其特征在于,所述应变数据包括不同时间的应变值;所述根据所述压力数据和所述应变数据得到待测物体的材料硬度,包括:
8.根据权利要求7所述的测量方法,其特征在于,所述计算每个滑动时间窗口的信号特征,包括:
9.一种用于物体可变形性测量的设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上进行运行的用于物体可变形性测量的测量程序,所述测量程序被所述处理器执行时实现如权利要求5-8任一项所述的测量方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序能够被执行以用于实现如权利要求5-8任一项所述的测量方法的步骤。
技术总结
本发明所提供的一种用于机械手感知物体可变形性的柔性触觉传感器,包括:依次贴合连接的下柔性层、螺旋叉指电极、多孔压阻层、中间柔性层及上柔性层,所述上柔性层面向所述中间柔性层的一侧设置有还原氧化石墨烯层,所述还原氧化石墨烯层背离所述上柔性层的一侧与所述中间柔性层贴合连接。本发明通过将多孔压阻层和还原氧化石墨烯层设置在同一触觉传感器中,实现了同时获取物体的压力数据和应变数据,进而可支持同时测量物体的材料硬度和整体刚度,可较为准确的进行物体可变形性测量。
技术研发人员:王子娅,彭争春
受保护的技术使用者:深圳大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!