停车场环境下的汽车导航方法、计算机装置和存储介质与流程
本发明涉及汽车,尤其是一种停车场环境下的汽车导航方法、计算机装置和存储介质。
背景技术:
1、汽车延伸了人们的出行范围,使得人们有更大的可能到达之前未到达过的地方,从而产生了引导驾驶员前往目的地的需求。导航技术能够对终端进行实时的定位和导航,为人们的出行提供了极大的便利。目前的导航技术主要基于卫星定位技术或者室内定位技术等技术实现。然而,目前存在数量巨大的停车场位于室内甚至地下等位置,这些位置难以接收到卫星定位信号,因此无法使用基于卫星定位技术的导航技术对位于停车场内部的汽车进行导航;而室内定位技术通常需要在室内环境安装蓝牙设备等无线通信设备,这对于停车场是一笔较大的成本,因此并非所有的停车场都能配备这样的设备,也就没有实现室内定位技术的基础,因此也无法使用基于室内定位技术的导航技术。由于目前的导航技术通常难以应用在停车场环境下,因此驾驶员驾驶汽车进入停车场、在停车场内寻找车位、从停车场驶出时,只能依靠驾驶员观察停车场内的指示牌和划线等标记,并依靠自己的记忆力和空间想象力来确定自己所处的位置以及安排进场和离场的路线,这就对驾驶员的驾驶技能以及停车场设施的完备性提出了较高要求。由于现实情况下不容易同时满足这样的高要求,因此经常发生驾驶员驾驶汽车在停车场内迷路的现象,既浪费驾驶员的时间,又影响了停车场内的交通安全。
技术实现思路
1、针对目前的导航技术难以应用在停车场环境下,导致停车场环境下通常失去导航技术的支持而发生交通混乱等技术问题,本发明的目的在于提供一种停车场环境下的汽车导航方法、计算机装置和存储介质。
2、一方面,本发明实施例包括一种停车场环境下的汽车导航方法,所述停车场环境下的汽车导航方法包括以下步骤:
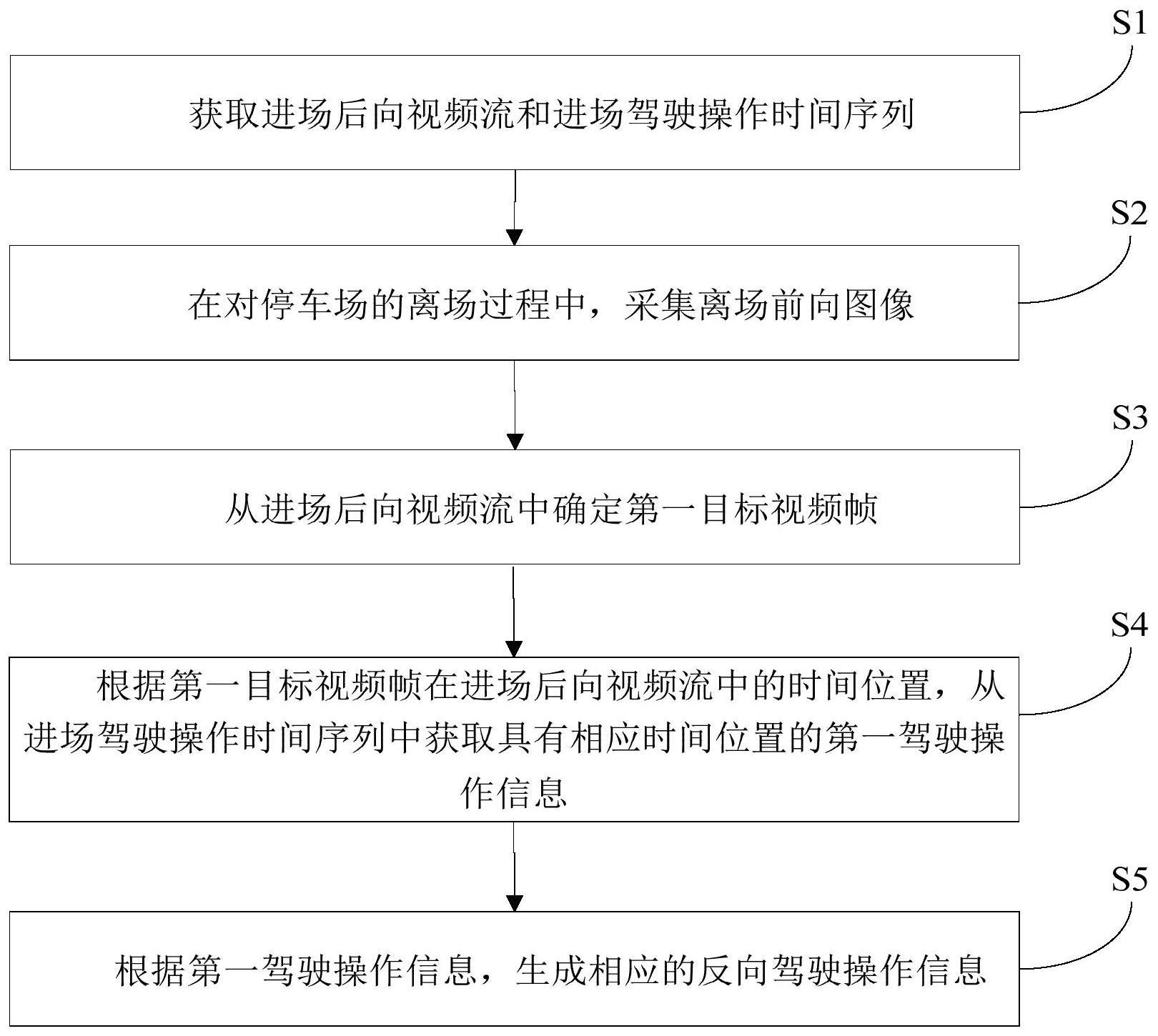
3、获取进场后向视频流和进场驾驶操作时间序列;所述进场后向视频流是在对停车场的进场过程中,从汽车的后向视角采集得到的视频流,所述进场驾驶操作时间序列是在对停车场的进场过程中,记录得到的驾驶操作信息形成的时间序列;
4、在对停车场的离场过程中,采集离场前向图像;所述离场前向图像是从汽车的前向视角采集得到的图像;
5、从所述进场后向视频流中确定第一目标视频帧;所述第一目标视频帧为所述进场后向视频流中的帧,所述第一目标视频帧与最新采集到的所述离场前向图像相匹配;
6、根据所述第一目标视频帧在所述进场后向视频流中的时间位置,从所述进场驾驶操作时间序列中获取具有相应时间位置的第一驾驶操作信息;
7、根据所述第一驾驶操作信息,生成相应的反向驾驶操作信息。
8、进一步地,所述停车场环境下的汽车导航方法还包括:
9、根据所述反向驾驶操作信息,生成导航信息和/或自动驾驶指令。
10、进一步地,所述停车场环境下的汽车导航方法还包括:
11、从所述第一目标视频帧所在位置开始,对所述进场后向视频流进行回放,获得回放视频流;
12、与所述反向驾驶操作信息的生成过程同步地播放所述回放视频流。
13、进一步地,所述获取进场后向视频流和进场驾驶操作时间序列,包括:
14、通过接收外部设备传输的数据,获得所述进场后向视频流和所述进场驾驶操作时间序列。
15、进一步地,所述获取进场后向视频流和进场驾驶操作时间序列,包括:
16、在对停车场的进场过程中,在本车采集所述进场后向视频流;
17、在采集所述进场后向视频流的过程中,在本车同步记录所述驾驶操作信息,获得所述进场驾驶操作时间序列。
18、进一步地,所述停车场环境下的汽车导航方法,还包括:
19、将本车采集得到的所述进场后向视频流和所述进场驾驶操作时间序列,共享至外部设备。
20、进一步地,所述停车场环境下的汽车导航方法,还包括:
21、对所述进场后向视频流进行离场标记信息搜索;
22、当从所述进场后向视频流中未搜索到所述离场标记信息,在对停车场的离场过程中,采集离场前向图像和离场后向图像;所述离场前向图像是从汽车的前向视角采集得到的图像,所述离场后向图像是从汽车的后向视角采集得到的图像;
23、从所述进场后向视频流中确定第二目标视频帧和第三目标视频帧;所述第二目标视频帧和所述第三目标视频帧均为所述进场后向视频流中的帧,所述第二目标视频帧与最新采集到的所述离场前向图像相匹配,所述第三目标视频帧与最新采集到的所述离场后向图像相匹配;
24、根据所述第二目标视频帧在所述进场后向视频流中的时间位置,从所述进场驾驶操作时间序列中获取具有相应时间位置的第二驾驶操作信息;
25、根据所述第三目标视频帧在所述进场后向视频流中的时间位置,从所述进场驾驶操作时间序列中获取具有相应时间位置的第三驾驶操作信息;
26、根据所述第二驾驶操作信息与所述第三驾驶操作信息,生成第四驾驶操作信息;所述第四驾驶操作信息与所述第二驾驶操作信息或者所述第三驾驶操作信息相容;
27、根据所述第四驾驶操作信息,生成导航信息和/或自动驾驶指令。
28、进一步地,所述停车场环境下的汽车导航方法,还包括:
29、获取进场前向视频流;所述进场前向视频流是在对停车场的进场过程中,从汽车的前向视角采集得到的视频流;
30、在停车场内的寻车过程中,采集移动端图像;
31、从所述进场后向视频流或所述进场前向视频流中确定第五目标视频帧;所述第五目标视频帧为所述进场后向视频流或所述进场前向视频流中的帧,所述第五目标视频帧与最新采集到的所述移动端图像相匹配;
32、根据所述第五目标视频帧在所述进场后向视频流或者所述进场前向视频流中的时间位置,从所述进场驾驶操作时间序列中获取具有相应时间位置的第五驾驶操作信息;
33、根据所述第五驾驶操作信息,确定目标位置;
34、根据所述目标位置进行寻车导航。
35、另一方面,本发明实施例还包括一种计算机装置,包括存储器和处理器,存储器用于存储至少一个程序,处理器用于加载至少一个程序以执行实施例中的一种停车场环境下的汽车导航方法。
36、另一方面,本发明实施例还包括一种存储介质,其中存储有处理器可执行的程序,处理器可执行的程序在由处理器执行时用于执行实施例中的一种停车场环境下的汽车导航方法。
37、本发明的有益效果是:实施例中的停车场环境下的汽车导航方法,无需依赖卫星导航技术以及基于无线通信的室内导航技术,因此在信号不佳的地下停车场等环境也能够适用;通过进场过程和离场过程拍摄所得的图像分析,生成的反向驾驶操作信息能够有效引导驾驶员或者汽车自动驾驶系统执行正确的驾驶操作,从而安全驾驶汽车原路返回实现离场;而且所生成的反向驾驶操作信息容易与汽车导航技术以及自动驾驶技术相衔接,从而为语音导航或者自动驾驶等技术提供数据支持。
技术特征:
1.一种停车场环境下的汽车导航方法,其特征在于,所述停车场环境下的汽车导航方法包括:
2.根据权利要求1所述的停车场环境下的汽车导航方法,其特征在于,所述停车场环境下的汽车导航方法还包括:
3.根据权利要求2所述的停车场环境下的汽车导航方法,其特征在于,所述停车场环境下的汽车导航方法还包括:
4.根据权利要求1所述的停车场环境下的汽车导航方法,其特征在于,所述获取进场后向视频流和进场驾驶操作时间序列,包括:
5.根据权利要求1所述的停车场环境下的汽车导航方法,其特征在于,所述获取进场后向视频流和进场驾驶操作时间序列,包括:
6.根据权利要求5所述的停车场环境下的汽车导航方法,其特征在于,所述停车场环境下的汽车导航方法,还包括:
7.根据权利要求1-6任一项所述的停车场环境下的汽车导航方法,其特征在于,所述停车场环境下的汽车导航方法,还包括:
8.根据权利要求1-6任一项所述的停车场环境下的汽车导航方法,其特征在于,所述停车场环境下的汽车导航方法,还包括:
9.一种计算机装置,其特征在于,包括存储器和处理器,存储器用于存储至少一个程序,处理器用于加载至少一个程序以执行权利要求1-8任一项所述的停车场环境下的汽车导航方法。
10.一种计算机可读存储介质,其中存储有处理器可执行的程序,其特征在于,处理器可执行的程序在由处理器执行时用于执行权利要求1-8任一项所述的停车场环境下的汽车导航方法。
技术总结
本发明公开了一种停车场环境下的汽车导航方法、计算机装置和存储介质,本发明通过获取反向驾驶操作信息,能够引导驾驶员或者汽车自动驾驶系统通过原路返回进行离场,无需依赖卫星导航技术以及基于无线通信的室内导航技术,因此在信号不佳的地下停车场等环境也能够适用;通过进场过程和离场过程拍摄所得的图像分析,生成的反向驾驶操作信息能够有效引导驾驶员或者汽车自动驾驶系统执行正确的驾驶操作,从而安全驾驶汽车原路返回实现离场;而且所生成的反向驾驶操作信息容易与汽车导航技术以及自动驾驶技术相衔接,从而为语音导航或者自动驾驶等技术提供数据支持。本发明可以为语音导航或者自动驾驶等技术提供支持。本发明广泛应用于汽车技术领域。
技术研发人员:吴秀冰,陈海旋,刘小锐,陈英贤
受保护的技术使用者:广汽本田汽车有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!