一种具有视觉分析的玻璃基板良品检测机器人的制作方法
本发明涉及视觉分析领域,更具体地说,尤其是涉及到一种具有视觉分析的玻璃基板良品检测机器人。
背景技术:
1、视觉检测就是用机器代替人眼来做测量和判断,视觉检测是指通过机器视觉产品将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,通过具有视觉分析的检测机器人能够对玻璃基板进行检测,检测出玻璃基板属于良品(是指保证用户可以稳定使用的产品)还是次品(是指不符合质量标准的产品);
2、但是由于具有视觉分析的检测机器人在对玻璃基板进行检测时存在以下不足:玻璃基板通过输送的方式输送进入到检测机器人内部进行检测,而输送的过程中玻璃基板表面静电容易吸附空气中的灰尘和杂质,导致检测时灰尘和杂质在玻璃基板表面形成黑点,使得视觉分析出误检测出玻璃基板存在缺陷问题,容易将良品检测为次品,并且检测机器人在对玻璃基板进行透光检测时,通过单个的光学检测头垂直对玻璃基板进行照射检测,检测的过程中光学检测头产生的照射光线容易发生散光,降低玻璃基板透光检测的准确性。
技术实现思路
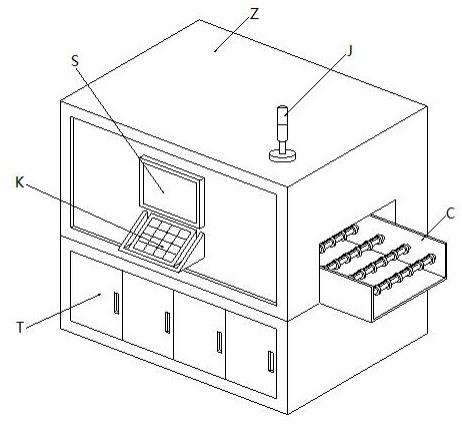
1、本发明实现技术目的所采用的技术方案是:该一种具有视觉分析的玻璃基板良品检测机器人,其结构包括检测机构、机箱、警报灯、视觉显示器、操控键盘、收纳箱,所述检测机构贯穿安装在机箱内部中端,并且机箱顶部安装有警报灯,所述警报灯和操控键盘均与视觉显示器电连接,所述视觉显示器与检测机构电连接,所述收纳箱安装在机箱内部下端。
2、作为本发明的进一步改进,所述检测机构包括护板架、清灰机构、输送机构、视觉摄像头、透光检测机构,所述护板架中部上端从右到左分别设有清灰机构、视觉摄像头和透光检测机构,所述输送机构安装在护板架下端内侧,所述输送机构设有十三个,并且呈横向等距分布在护板架下端内侧。
3、作为本发明的进一步改进,所述清灰机构包括压簧、铰接架、转动杆、扭力轴、毛刷,所述压簧上端固定安装在护板架中部上端,并且压簧下端与铰接架顶部相焊接,所述铰接架下端内侧通过扭力轴与转动杆相铰接,所述转动杆下端设有毛刷,所述压簧设有九个,并且等距分布在护板架上端与铰接架顶部之间,所述铰接架下端内侧与转动杆外侧连接两端均设有一个扭力轴。
4、作为本发明的进一步改进,所述输送机构包括电转杆、刷板、承托轮、分流管、喷气孔,所述电转杆上端设有刷板,所述电转杆贯穿于承托轮中心并且同步转动,所述分流管采用间隙配合安装在电转杆内部,并且喷气孔贯穿于电转杆内部下端,所述承托轮设有七个,呈横向等距分布在电转杆外侧处于同一轴心上,并且承托轮采用绝缘橡胶材质,具有较好的绝缘性和回弹性。
5、作为本发明的进一步改进,所述透光检测机构包括处理器、连接架、竖向光学检测头、调节光学检测头,所述处理器固定安装在护板架中部上端,并且处理器设在连接架顶部,所述处理器底部中端设有竖向光学检测头并且电连接,所述调节光学检测头安装在连接架下端,并且调节光学检测头与处理器电连接,所述调节光学检测头设有两个,并且呈左右对称安装在连接架下端两侧,并且两侧的调节光学检测头呈对向倾斜安装。
6、作为本发明的进一步改进,所述调节光学检测头包括滑动轴、检测头、导光机构、铰接板、支撑杆,所述滑动轴设在检测头顶部,并且滑动轴滑动安装在连接架下端内部,所述检测头下端连接有导光机构,并且导光机构外侧中端与铰接板轴连接,所述铰接板设有两个,并且两个铰接板之间通过支撑杆进行伸缩连接配合,所述滑动轴采用弹性材质,能够在连接架下端内部进行挤压滑动并且定位。
7、作为本发明的进一步改进,所述导光机构包括导光管、缩口镜面,所述导光管连接在检测头下端,并且导光管内部设有缩口镜面,所述导光管外侧中端与铰接板轴连接,所述缩口镜面设有十二个,并且四个为一组,四组的缩口镜面等距分布在导光管内部。
8、本发明的有益效果在于:
9、1.通过电转杆的转动带动承托轮进行转动从而对玻璃基板进行输送,刷板在转动的过程中能够对玻璃基板避免进行清刷,当电转杆下端的喷气孔转动到上时,与分流管进行贯通连接,这时分流管内部的气体从喷气孔内部往上喷出,对玻璃基板进行喷气清灰,提高玻璃基板底面的清洁度;
10、2.玻璃基板输送到清灰机构正下方时,玻璃基板上端面与毛刷发生接触,通过扭力轴为转动杆施加弹性扭力,使得转动杆能够带动及毛刷进行弹性摆动,提高毛刷对玻璃基板上表面的清扫力度,能够有效的避免灰尘以及杂质在玻璃基板表面形成黑点,防止将玻璃基板良品检测为次品;
11、3.经过视觉摄像头的视觉检测后,玻璃基板继续进行输送,输送到透光检测机构的正下方时,通过竖向光学检测头以及两侧的调节光学检测头配合形成三向照射光线照射在下端的玻璃基板表面,提高对玻璃基板透光性进行检测的准确性;
12、4.两侧的调节光学检测头通过滑动轴在连接架下端内部进行上下挤压滑动并且定位,使得检测头上端进行上下滑动,配合铰接板和支撑杆的伸缩连接,对检测头下端的导光机构进行左右移动调节,从而使得检测头的倾斜角度能够调节并且固定,提高检测头照射光线的多角度方位对玻璃基板进行透光检测;
13、5.检测头产生的照射光线通过导光管进行传导照射光线,传导的过程中通过导光管内部的四个缩口镜面能够对导光管内部的管径进行内缩,确保检测头的照射光线在导光管内部进行直线照射,避免照射光线在照射的过程中发生散光的情况。
技术特征:
1.一种具有视觉分析的玻璃基板良品检测机器人,其结构包括检测机构(c)、机箱(z)、警报灯(j)、视觉显示器(s)、操控键盘(k)、收纳箱(t),其特征在于:
2.根据权利要求1所述的一种具有视觉分析的玻璃基板良品检测机器人,其特征在于:所述检测机构(c)包括护板架(c5)、清灰机构(c1)、输送机构(c8)、视觉摄像头(c6)、透光检测机构(c3),所述护板架(c5)中部上端从右到左分别设有清灰机构(c1)、视觉摄像头(c6)和透光检测机构(c3),所述输送机构(c8)安装在护板架(c5)下端内侧。
3.根据权利要求2所述的一种具有视觉分析的玻璃基板良品检测机器人,其特征在于:所述清灰机构(c1)包括压簧(c14)、铰接架(c12)、转动杆(c19)、扭力轴(c17)、毛刷(c15),所述压簧(c14)上端固定安装在护板架(c5)中部上端,并且压簧(c14)下端与铰接架(c12)顶部相焊接,所述铰接架(c12)下端内侧通过扭力轴(c17)与转动杆(c19)相铰接,所述转动杆(c19)下端设有毛刷(c15)。
4.根据权利要求2所述的一种具有视觉分析的玻璃基板良品检测机器人,其特征在于:所述输送机构(c8)包括电转杆(c82)、刷板(c83)、承托轮(c85)、分流管(c88)、喷气孔(c86),所述电转杆(c82)上端设有刷板(c83),所述电转杆(c82)贯穿于承托轮(c85)中心并且同步转动,所述分流管(c88)采用间隙配合安装在电转杆(c82)内部,并且喷气孔(c86)贯穿于电转杆(c82)内部下端。
5.根据权利要求2所述的一种具有视觉分析的玻璃基板良品检测机器人,其特征在于:所述透光检测机构(c3)包括处理器(c33)、连接架(c36)、竖向光学检测头(c38)、调节光学检测头(c31),所述处理器(c33)固定安装在护板架(c5)中部上端,并且处理器(c33)设在连接架(c36)顶部,所述处理器(c33)底部中端设有竖向光学检测头(c38)并且电连接,所述调节光学检测头(c31)安装在连接架(c36)下端,并且调节光学检测头(c31)与处理器(c33)电连接。
6.根据权利要求5所述的一种具有视觉分析的玻璃基板良品检测机器人,其特征在于:所述调节光学检测头(c31)包括滑动轴(1z)、检测头(1j)、导光机构(1d)、铰接板(1v)、支撑杆(1g),所述滑动轴(1z)设在检测头(1j)顶部,并且滑动轴(1z)滑动安装在连接架(c36)下端内部,所述检测头(1j)下端连接有导光机构(1d),并且导光机构(1d)外侧中端与铰接板(1v)轴连接,所述铰接板(1v)设有两个,并且两个铰接板(1v)之间通过支撑杆(1g)进行伸缩连接配合。
7.根据权利要求6所述的一种具有视觉分析的玻璃基板良品检测机器人,其特征在于:所述导光机构(1d)包括导光管(d3)、缩口镜面(d8),所述导光管(d3)连接在检测头(1j)下端,并且导光管(d3)内部设有缩口镜面(d8),所述导光管(d3)外侧中端与铰接板(1v)轴连接。
技术总结
本发明公开了一种具有视觉分析的玻璃基板良品检测机器人,其结构包括护板架、清灰机构、输送机构、视觉摄像头、透光检测机构,玻璃基板输送到清灰机构正下方时,玻璃基板上端面与毛刷发生接触,通过扭力轴为转动杆施加弹性扭力,使得转动杆能够带动及毛刷进行弹性摆动,提高毛刷对玻璃基板上表面的清扫力度,能够有效的避免灰尘以及杂质在玻璃基板表面形成黑点,防止将玻璃基板良品检测为次品;检测头产生的照射光线通过导光管进行传导照射光线,传导的过程中通过导光管内部的四个缩口镜面能够对导光管内部的管径进行内缩,确保检测头的照射光线在导光管内部进行直线照射,避免照射光线在照射的过程中发生散光的情况。
技术研发人员:杨泽敏,沈超,孟庆辉,闫志新,余丽霞
受保护的技术使用者:上海中电电子系统科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!