面向玻璃幕墙的爬壁机器人及自动化检测方法
本公开涉及结构工程损伤检测领域,尤其涉及一种面向玻璃幕墙的爬壁机器人及自动化检测方法。
背景技术:
1、玻璃幕墙是一种集采光、遮雨、防风、保温多功能为一体的建筑外围护结构,随着城市建设的美观要求以及高层建筑的需求量增多,玻璃幕墙作为建筑技术、功能、结构和建筑艺术的综合体,已经被广泛应用于建筑结构领域,尤其是高层建筑领域。由于建筑设计的丰富多彩以及高层建筑所需求的结构特性,玻璃幕墙的形态、结构支撑形式也日趋复杂,在日常状态的风荷载与温度荷载的长期作用下,高层玻璃幕墙会随着时间的延长不可避免地出现一些缺陷,比如玻璃面板的划痕、自爆,结构胶的老化、腐蚀,支承结构的应力松弛、变形。
2、现有玻璃幕墙检测绝大多数应用蜘蛛人进行高空作业来针对每块玻璃的质量进行检测,人工检测效率低且成本高,危险系数高;此外,现有的自动化检测手段例如光弹法,光弹法是仅针对安全玻璃自爆缺陷的检测方法,又如固有振动法仅能针对底部幕墙结构体系的缺陷检测,却不能满足高层玻璃幕墙的综合性损伤检测需求。
3、综上,现有技术公开的方案无法实现对玻璃面板、结构胶、支撑结构等隐蔽损伤检测的综合检测,得到的检测结果比较片面,导致测试区域有限、检测周期长、检测精度低。
技术实现思路
1、有鉴于此,本公开实施例提供了一种面向玻璃幕墙的爬壁机器人及自动化检测方法,至少部分的解决现有技术中存在的检测周期长、检测结果片面、检测精度低的问题。
2、第一方面,本公开实施例提供了一种面向玻璃幕墙的爬壁机器人,包括:
3、机器人本体,所述机器人本体配置有无线传输装置、爬壁装置和支撑装置;
4、所述支撑装置包含支撑连接件以及带有空气减隔震单元的真空吸盘,其中真空吸盘用于吸附在待测玻璃幕墙单元的两侧相邻的单元上;
5、集成设置于所述机器人本体的多功能检测设备;所述多功能检测设备包括激励源设备和冲击感知设备和视觉检测设备,所述激励源设备用于提供预设质量激励源,所述冲击感知设备用于采集冲击感知信息,所述视觉检测设备用于采集图像信息。
6、可选的,所述激励源设备包括升降支架以及带有空气减隔震单元的高精度全自动力锤;
7、所述冲击感知设备包括低频加速度计、超声传感器、低频麦克风、微波雷达和微型激光多普勒测振仪;所述微型激光多普勒测振仪与所述微波雷达通过旋转装置装设于所述机器人本体;
8、所述视觉检测设备包括工业相机、高光谱传感器和3d扫描仪。
9、本申请的第二方面提供了一种面向玻璃幕墙的自动化检测方法,该方法包括:
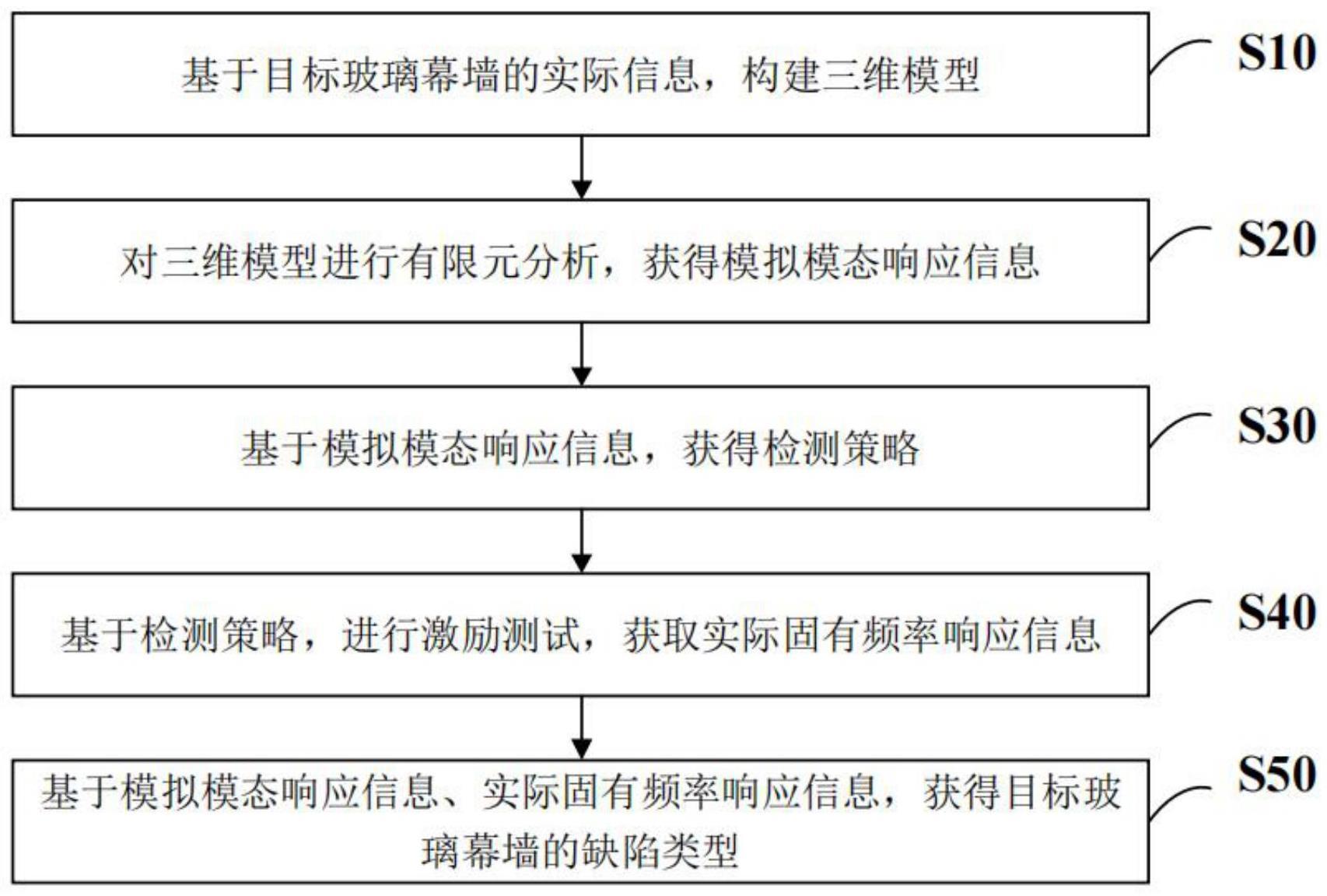
10、基于目标玻璃幕墙的实际信息,构建三维模型;
11、对所述三维模型进行有限元分析,获得模拟模态响应信息;其中,所述模拟模态响应信息包括若干阶模态振型、各阶模态振型对应的固有频率以及损伤等级范围;
12、基于所述模拟模态响应信息,获得检测策略;其中,所述检测策略包括模态实测传感器选型策略、模态实测检测点设置位置、模态实测机器人走行路径,且所述模态实测检测点设置位置为可以激励起全部目标模态的测点位置;
13、基于所述检测策略,进行激励测试,获取实际固有频率响应信息;其中,所述实际固有频率响应信息包括若干阶实际固有频率振型、各阶模态基频;
14、基于所述模拟模态响应信息、所述实际固有频率响应信息,获得目标玻璃幕墙的缺陷类型。
15、可选的,所述对所述三维模型进行有限元分析,获得模拟模态响应信息,包括:
16、基于所述三维模型,建立有限元模型;
17、基于预设参数对所述有限元模型进行分析,获得所述模拟模态响应信息;
18、所述预设参数包括材料特性和边界条件。
19、可选的,若干阶所述模态振型包括幕墙单元构件的第一阶模态振型、第二阶模态振型、第三阶模态振型、第四阶模态振型和第五阶模态振型。
20、可选的,所述损伤等级范围包括单一损伤范围和混合损伤范围,所述单一损伤范围包括无损伤段和多损伤段,所述混合损伤范围包括无-单损伤段、单-双损伤段和双-三损伤段。
21、可选的,所述基于所述检测策略,进行激励测试,获取实际固有频率响应信息,包括:
22、基于所述模态实测传感器选型策略,在所述模态实测检测点设置位置布设模态实测传感器,采用高精度全自动力锤进行激励,获取所述实际固有频率响应信息。
23、可选的,若干阶所述实际固有频率振型包括第一阶实际固有频率振型、第二阶实际固有频率振型、第三阶实际固有频率振型、第四阶实际固有频率振型和第五阶实际固有频率振型;
24、各阶模态基频包括第一阶振动频率、第二阶振动频率、第三阶振动频率、第四阶振动频率和第五阶振动频率。
25、可选的,所述基于所述模拟模态响应信息、所述实际固有频率响应信息,获得目标玻璃幕墙的缺陷类型,包括:
26、基于所述实际固有频率响应信息,获得固有频率测试频率;
27、判断所述固有频率测试频率是否属于所述单一损伤范围,若是,直接获得目标玻璃幕墙的缺陷类型;
28、若否,对所述固有频率测试频率按照预设误差进行处理,获得修正数据范围;
29、基于所述混合损伤范围,获得所述目标玻璃幕墙的缺陷类型。
30、可选的,在三维模型构建之前还包括:基于目标玻璃幕墙的实际信息,判断所述目标玻璃幕墙是否存在预设裂纹状态;
31、若是,则判定该目标玻璃幕墙为异常区域,并重新选取不存在所述预设裂纹状态的待检测目标区域;
32、基于待检测目标区域,构建更新的三维模型。
33、本申请公开的面向玻璃幕墙的爬壁机器人,能够进行自动化实测,实现高空和检测人员难以到达区域的玻璃幕墙损伤检测,同时能够实现对玻璃幕墙结构的无损检测。此外,该方案高效融合冲击-声振、冲击-响应、微波雷达、激光多普勒测振、机器视觉、高光谱测试方法,在检测过程中能够实现玻璃幕墙结构安全性能的高效检测与实时分析,有效提升玻璃幕墙结构损伤检测测试的精度和效率。
34、本公开实施例提供的玻璃幕墙结构缺陷自动化检测方法,本申请首先进行目标玻璃幕墙的实际信息采集,保证构建的模型与目标玻璃幕墙信息一致;然后在理想状态下对构建的三维模型进行模拟分析,获得理论数据信息,来对目标玻璃幕墙实测进行指导;最后,对实测的数据进行对比分析,能够精准、全面地获得目标玻璃幕墙的缺陷类型,自动化程度高,精度高、可靠性强、安全等级高。
35、上述说明仅是本公开技术方案的概述,为了能更清楚了解本公开的技术手段,而可依照说明书的内容予以实施,并且为让本公开的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
技术特征:
1.一种面向玻璃幕墙的爬壁机器人,其特征在于,包括:
2.根据权利要求1所述的面向玻璃幕墙的爬壁机器人,其特征在于,所述激励源设备包括升降支架以及带有空气减隔震单元的高精度全自动力锤;
3.一种面向玻璃幕墙的自动化检测方法,其特征在于,该方法包括:
4.根据权利要求3所述的玻璃幕墙结构缺陷自动化检测方法,其特征在于,所述对所述三维模型进行有限元分析,获得模拟模态响应信息,包括:
5.根据权利要求4所述的玻璃幕墙结构缺陷自动化检测方法,其特征在于,若干阶所述模态振型包括幕墙单元构件的第一阶模态振型、第二阶模态振型、第三阶模态振型、第四阶模态振型和第五阶模态振型。
6.根据权利要求5所述的玻璃幕墙结构缺陷自动化检测方法,其特征在于,所述损伤等级范围包括单一损伤范围和混合损伤范围,所述单一损伤范围包括无损伤段和多损伤段,所述混合损伤范围包括无-单损伤段、单-双损伤段和双-三损伤段。
7.根据权利要求6所述的玻璃幕墙结构缺陷自动化检测方法,其特征在于,所述基于所述检测策略,进行激励测试,获取实际固有频率响应信息,包括:
8.根据权利要求7所述的玻璃幕墙结构缺陷自动化检测方法,其特征在于,若干阶所述实际固有频率振型包括第一阶实际固有频率振型、第二阶实际固有频率振型、第三阶实际固有频率振型、第四阶实际固有频率振型和第五阶实际固有频率振型;
9.根据权利要求8所述的玻璃幕墙结构缺陷自动化检测方法,其特征在于,所述基于所述模拟模态响应信息、所述实际固有频率响应信息,获得目标玻璃幕墙的缺陷类型,包括:
10.根据权利要求3所述的玻璃幕墙结构缺陷自动化检测方法,其特征在于,在三维模型构建之前还包括:
技术总结
本申请公开了一种面向玻璃幕墙的爬壁机器人及自动化检测方法。其中,爬壁机器人包括机器人本体以及集成设置于该机器人本体的多功能检测设备,机器人本体配置有无线传输装置和爬壁装置;多功能检测设备包括激励源设备和冲击感知设备和视觉检测设备,激励源设备用于提供预设质量激励源,冲击感知设备用于采集冲击感知信息,视觉检测设备用于采集图像信息;该申请能够实现目标玻璃幕墙的全面自动化检测,实现目标玻璃幕墙的缺陷高效、精准的检测,自动化水平高,检测周期短,同时大大提高安全系数。
技术研发人员:庞鑫,陈洪兵,许镇,王江,岳清瑞
受保护的技术使用者:北京科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!