一种旋转调制捷联惯导系统姿态提取方法与流程
本发明属于惯性导航,尤其涉及一种旋转调制捷联惯导系统姿态提取方法。
背景技术:
1、惯性导航系统精度受惯性器件自身漂移的影响,为提高系统长航时条件下的导航精度,人们提出了用旋转调制的方法来对惯性器件误差进行调制,使误差在一个周期内的积分值近似为零,从而使得惯导系统导航精度得以提高。
2、旋转调制捷联惯导系统航解算出来的姿态信息是imu的姿态信息。因此,需要利用转位机构测得的角位置信息,进行imu姿态矩阵到载体姿态矩阵的变换,得到载体的姿态信息。转位机构存在误差,这对姿态精度要求苛刻的测量仪器,是不可忽视的。因此研究旋转调制捷联惯导系统姿态提取方法具有重要意义。
技术实现思路
1、为解决上述问题,本发明提供一种旋转调制捷联惯导系统姿态提取方法,补偿转位机构的角度误差和方向误差,能够精确提取旋转调制捷联惯导系统姿态。
2、一种旋转调制捷联惯导系统姿态提取方法,包括以下步骤:
3、分别获取每个采样时刻ti时,用于安装惯导系统的转位机构的实际角度位置与转位机构的理论角度位置之间的误差
4、获取转位机构的转轴在imu坐标系中的三轴投影角θx,θy,θz;
5、根据误差和三轴投影角θx,θy,θz获取惯导系统在转位机构当前任意理论角度θcur下的姿态矩阵cins。
6、进一步地,惯导系统在转位机构当前任意理论角度θcur下的姿态矩阵cins的获取方法为:
7、在所有采样时刻ti对应的理论角度位置中,将小于θcur的所有中的最大值作为angs,并将angs对应的误差作为errs;同时,将大于θcur的所有中的最小值作为ange,并将ange对应的误差作为erre;
8、根据误差和误差计算转位机构当前的实际角度θact:
9、θact=θcur+(1-p)*errs+p*erre
10、其中,p为辅助变量,且有:
11、
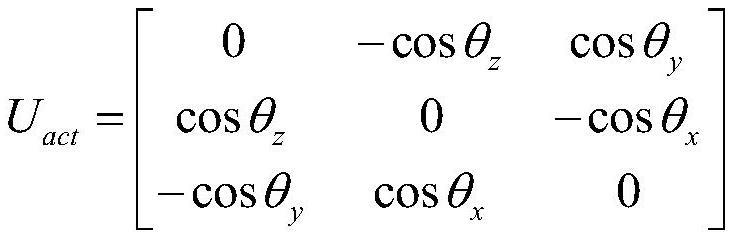
12、根据三轴投影角θx,θy,θz计算转位机构当前的实际姿态uact:
13、
14、根据实际姿态uact计算转位机构与惯导系统之间的转移矩阵ctrans:
15、ctrans=i+sin(θact)*uact+(1-cos(θact))*uact*uact
16、其中,i为单位矩阵;
17、根据转移矩阵ctrans计算姿态矩阵cins如下:
18、cins=cins*ctranst
19、其中,t表示转置。
20、进一步地,每个采样时刻ti时的误差计算方法如下:
21、惯导系统开机,转位机构控制imu旋转到角度值0,进行初始对准,直到对准完成,记录imu此时的姿态矩阵cz;
22、转位机构控制imu正向旋转360°,并采集每个采样时刻ti时,陀螺输出的imu三轴角增量imu姿态矩阵转位机构的理论角度位置其中,i代表采样时刻序号,i=1,2,3,...,len,len代表采集数据最终时刻的序号;
23、计算每个采样时刻ti时,陀螺测量的转位机构的三轴角速度如下:
24、
25、其中,为地球自转角速度在地理坐标系中的投影角速度;
26、计算每个采样时刻ti时,陀螺测量的转位机构的实际角度位置如下:
27、
28、其中,初始值
29、计算每个转位机构的理论角度位置处,与转位机构的实际角度位置的误差
30、进一步地,转位机构的转轴在imu坐标系中的三轴投影角θx,θy,θz的获取方法如下:
31、重复q次正转反转操作,得到q对姿态矩阵,其中,正转反转操作为:转位机构控制imu正向旋转到角度值posk,并记录imu此时的姿态矩阵转位机构控制imu反向旋转到角度值360°-posk,并记录imu此时的姿态矩阵其中,k代表序号,k=1,2,3,...,q;
32、根据q对姿态矩阵计算辅助矩阵u如下:
33、
34、其中,表示第k次正转反转操作时的imu联合姿态矩阵,且有:
35、
36、其中,姿态矩阵cz为惯导系统开机时,转位机构控制imu旋转到角度值0°,进行初始对准,直到对准完成时imu的姿态矩阵;
37、根据辅助矩阵u计算三轴投影角θx,θy,θz如下:
38、θx=arccos(u(3,2)),θy=arccos(u(1,3)),θz=arccos(u(2,1))
39、其中,u(3,2)为辅助矩阵u第3行第2列的元素,u(1,3)为辅助矩阵u第1行第3列的元素,u(2,1)为辅助矩阵u第2行第1列的元素。
40、进一步地,将每个采样时刻ti时的理论角度位置误差以及三轴投影角θx,θy,θz存储在惯导系统中,以供获取惯导系统在转位机构当前任意理论角度θcur下的姿态矩阵cins时进行实时调用。
41、有益效果:
42、1、本发明提供一种旋转调制捷联惯导系统姿态提取方法,获取每个采样时刻ti时转位机构的实际角度位置与转位机构的理论角度位置之间的误差相当于补偿转位机构的角度误差;然后再获取转位机构的转轴在imu坐标系中的三轴投影角θx,θy,θz,相当于补偿转位机构的方向误差;最后才用补偿了角度误差和方向误差的转位机构获取惯导系统的姿态矩阵,能够精确提取旋转调制捷联惯导系统姿态。
43、2、本发明提供一种旋转调制捷联惯导系统姿态提取方法,利用陀螺角速度测量精度高的优点,对转位机构的角位置进行了校正,不仅提高了惯导系统的姿态提取精度,也提高了转位机构的控制精度。
44、3、本发明提供一种旋转调制捷联惯导系统姿态提取方法,利用imu姿态信息,对转位机构的旋转轴进行了标定,配合校正后的角位置,可提供精确的姿态信息。
45、4、本发明提供一种旋转调制捷联惯导系统姿态提取方法,将每个采样时刻ti时的理论角度位置误差以及三轴投影角θx,θy,θz存储在惯导系统中,以供获取惯导系统在转位机构当前任意理论角度θcur下的姿态矩阵cins时进行实时调用,能够提高姿态提取的效率。
技术特征:
1.一种旋转调制捷联惯导系统姿态提取方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种旋转调制捷联惯导系统姿态提取方法,其特征在于,惯导系统在转位机构当前任意理论角度θcur下的姿态矩阵cins的获取方法为:
3.如权利要求1所述的一种旋转调制捷联惯导系统姿态提取方法,其特征在于,每个采样时刻ti时的误差计算方法如下:
4.如权利要求1所述的一种旋转调制捷联惯导系统姿态提取方法,其特征在于,转位机构的转轴在imu坐标系中的三轴投影角θx,θy,θz的获取方法如下:
5.如权利要求1~4任一权利要求所述的一种旋转调制捷联惯导系统姿态提取方法,其特征在于,将每个采样时刻ti时的理论角度位置误差以及三轴投影角θx,θy,θz存储在惯导系统中,以供获取惯导系统在转位机构当前任意理论角度θcur下的姿态矩阵cins时进行实时调用。
技术总结
本发明提供一种旋转调制捷联惯导系统姿态提取方法,获取每个采样时刻t<subgt;i</subgt;时转位机构的实际角度位置与转位机构的理论角度位置之间的误差相当于补偿转位机构的角度误差;然后再获取转位机构的转轴在IMU坐标系中的三轴投影角θ<subgt;x</subgt;,θ<subgt;y</subgt;,θ<subgt;z</subgt;,相当于补偿转位机构的方向误差;最后才用补偿了角度误差和方向误差的转位机构获取惯导系统的姿态矩阵,能够精确提取旋转调制捷联惯导系统姿态。
技术研发人员:牛亚辉,姜校亮,可伟,黄科,段明月
受保护的技术使用者:河北汉光重工有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!