目标边界框的确定方法、装置、设备及存储介质与流程
本申请属于车辆,尤其涉及一种目标边界框的确定方法、装置、设备及存储介质。
背景技术:
1、随着车辆科技的不断发展和辅助驾驶的深入研究,在车辆驾驶时,为了给车辆规划合理路径,并在突发状况时做出正确决策,需要准确感知车辆在行驶环境中的目标对象。现有技术可以通过在车辆上装载摄像头感知目标对象,并确定目标对象的边界框,但摄像头对于距离不敏感,目标对象边界框的确定不够准确。
技术实现思路
1、本申请实施例提供一种目标边界框的确定方法、装置、设备及存储介质,能够准确测量距离,从而准确确定目标对象的边界框。
2、第一方面,本申请实施例提供一种目标边界框的确定方法,应用于车辆,方法包括:
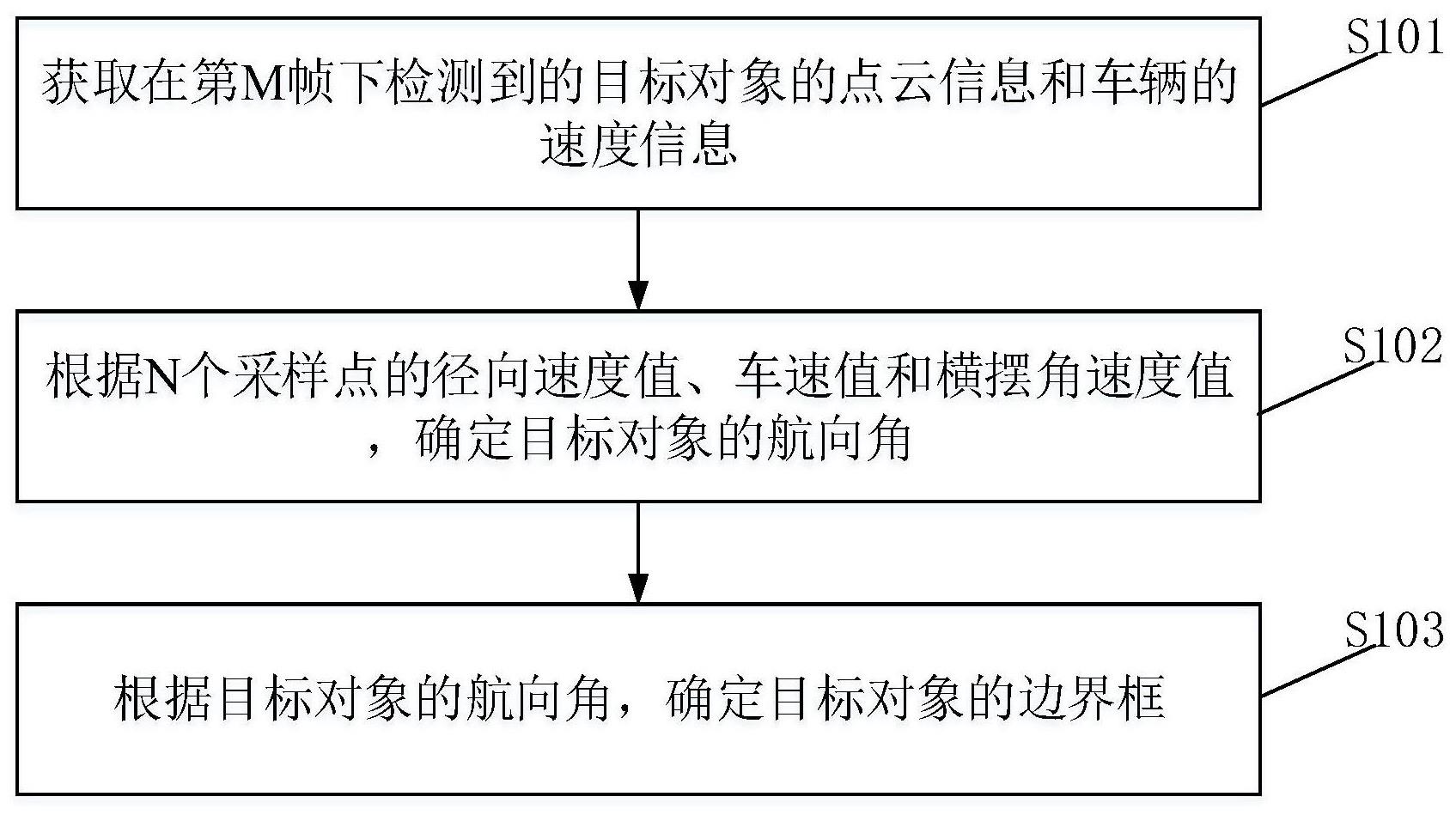
3、获取在第m帧下检测到的目标对象的点云信息和所述车辆的速度信息,所述速度信息包括车速值和横摆角速度值,所述点云信息包括n个采样点的点信息,所述点信息包括径向速度值,所述m为正整数,所述n为正整数;
4、根据所述n个采样点的径向速度值、所述车速值和所述横摆角速度值,确定所述目标对象的航向角,所述航向角用于表示所述目标对象与所述车辆航向之间的夹角;
5、根据所述目标对象的航向角,确定所述目标对象的边界框。
6、第二方面,本申请实施例提供了一种目标边界框的确定装置,应用于车辆,装置包括:
7、获取模块,用于获取在第m帧下检测到的目标对象的点云信息和所述车辆的速度信息,所述速度信息包括车速值和横摆角速度值,所述点云信息包括n个采样点的点信息,所述点信息包括径向速度值,所述m为正整数,所述n为正整数;
8、第一确定模块,用于根据所述n个采样点的径向速度值、所述车速值和所述横摆角速度值,确定所述目标对象的航向角,所述航向角用于表示所述目标对象与所述车辆航向之间的夹角;
9、第二确定模块,用于根据所述目标对象的航向角,确定所述目标对象的边界框。
10、第三方面,本申请实施例提供了一种电子设备,设备包括:处理器以及存储有计算机程序指令的存储器;所述处理器执行所述计算机程序指令时实现如上任意一项所述的目标边界框的确定方法。
11、第四方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现如上任意一项所述的目标边界框的确定方法。
12、第五方面,本申请实施例提供了一种计算机程序产品,所述计算机程序产品中的指令由电子设备的处理器执行时,使得所述电子设备执行如上任意一项所述的目标边界框的确定方法。
13、第六方面,本申请实施例提供了一种车辆,包括:电子设备,所述电子设备用于实现如上任意一项所述的目标边界框的确定方法。
14、本申请实施例的目标边界框的确定方法、装置、设备及存储介质,应用于车辆,可以根据在第m帧下检测到的目标对象的点云信息和车辆的速度信息,确定目标对象的航向角,速度信息包括车速值和横摆角速度值,点云信息包括n个采样点的点信息,点信息包括径向速度值,并根据目标对象的航向角,可以确定目标对象的边界框。如此,本申请实施例,通过雷达检测目标对象的点云信息和车辆的速度信息,确定目标对象的边界框,相较于现有车载摄像头感知目标对象的边界框而言,可以准确测量距离,从而准确确定目标对象的边界框。
技术特征:
1.一种目标边界框的确定方法,其特征在于,应用于车辆,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述点信息还包括坐标信息、方位角度值和俯仰角度值,所述坐标信息用于表征所述采样点在所述车辆的坐标系中位置信息;
3.根据权利要求2所述的方法,其特征在于,所述根据所述n个采样点的径向速度值、方位角度值和俯仰角度值,确定所述目标对象的相对航向信息,包括:
4.根据权利要求2所述的方法,其特征在于,所述目标对象的坐标信息包括所述目标对象的横坐标值和所述目标对象的纵坐标值,所述相对航向信息包括相对横向子信息和相对纵向子信息,所述绝对航向信息包括绝对横向子信息和绝对纵向子信息;
5.根据权利要求1所述的方法,其特征在于,所述根据所述目标对象的航向角,确定所述目标对象的边界框,包括:
6.根据权利要求1所述的方法,其特征在于,在所述根据所述目标对象的航向角,确定所述目标对象的边界框之前,还包括:
7.根据权利要求6所述的方法,其特征在于,所述点信息还包括信噪比值;
8.根据权利要求7所述的方法,其特征在于,所述根据所述n个采样点的坐标信息,计算所述旋转角集合中各所述旋转角的目标距离集合,包括:
9.根据权利要求7所述的方法,其特征在于,在所述在各所述旋转角的得分中,将最小得分对应的所述旋转角确定为所述目标对象的目标旋转角之后,还包括:
10.一种目标边界框的确定装置,其特征在于,应用于车辆,所述装置包括:
技术总结
本申请公开了一种目标边界框的确定方法、装置、设备及存储介质,涉及车辆技术领域。应用于车辆,其方法包括:获取在第M帧下检测到的目标对象的点云信息和车辆的速度信息,速度信息包括车速值和横摆角速度值,点云信息包括N个采样点的点信息,点信息包括径向速度值,M为正整数,N为正整数;根据N个采样点的径向速度值、车速值和横摆角速度值,确定目标对象的航向角,航向角用于表示目标对象与车辆航向之间的夹角;根据目标对象的航向角,确定目标对象的边界框。根据本申请实施例,能够准确测量距离,从而准确确定目标对象的边界框。
技术研发人员:杜红灯,张姣姣,武帅,周城宇
受保护的技术使用者:北京经纬恒润科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!