一种应用于脉冲星自主导航系统的导航单元及方法与流程
本发明涉及空间飞行器脉冲星自主导航,具体涉及一种应用于脉冲星自主导航系统的导航单元及方法。
背景技术:
1、脉冲星自主导航技术是航天器实现自主导航的新手段。由于宇宙中的脉冲星发出的信号普遍较弱,为了保证脉冲星探测器收集到足够多的脉冲星光子信息,近年来,国内外学者和技术人员将单航天器脉冲星自主导航方式进行了拓展,实现了多航天器脉冲星自主导航的方法。这种利用多个航天器共同实现脉冲星自主导航的方法在本专利中被称为分布式或分布集群式脉冲星自主导航方法。
2、分布式脉冲星自主导航利用多颗不同的航天器对某些特定脉冲星进行观测,获得脉冲相位观测量,基于星间链路提供的星间测距等数据以及通信支持,在导航数据处理单元中对不同的脉冲星相位观测量进行滤波处理,从而实现自主导航定位。但是,分布式脉冲星导航存在如下问题:
3、(1)不具备测量筛选处理功能,由于脉冲到达时间需要经过复杂的数据处理过程,部分航天器观测到的脉冲到达时间(toa)与真实值可能存在较大的偏差,或者一些脉冲toa计算值与均值差别较大,影响后续处理。传统的导航滤波器仅对这些数据进行阈值剔除,即对超出阈值的脉冲toa做剔除,这损失了一定的观测信息。
4、(2)不具备序贯处理功能,在分布集群式航天器系统的庞大网络中,信息的传递难以达到同步,也就是说,同一周期内的各航天器脉冲toa观测量实际传递中不是同时到达中央导航处理单元的。传统批处理方式要等待所有观测量都到达后再构建统一的测量方程,统一进行滤波处理,这无疑浪费了等待时间,浪费了计算资源。因而对这些脉冲toa信息根据到达先后分别进行序贯处理是十分必要的。
5、(3)不具备错序处理功能,分布集群导航方式将脉冲星导航滤波周期大大缩减,但由于星间链路的资源分配和航天器空间位置限制,部分航天器的脉冲toa观测量可能不会在当前导航周期内传递给中央导航处理单元,为了不浪费这些脉冲toa观测资源,导航算法需要能够在当前周期处理来自上一周期的延迟观测量。
技术实现思路
1、本发明提供了一种应用于脉冲星自主导航系统的导航单元及方法,其目的在于解决现有技术存在的问题,进一步提高脉冲星导航效能。
2、为实现上述目的,本发明的技术方案为:
3、本发明提供了一种应用于脉冲星自主导航系统的导航单元及方法,所述的导航单元附着于分布式航天器系统中,所述的方法基于导航单元实现;所述的导航单元包括:
4、脉冲toa筛选模块,根据下述阈值设定模块设定的脉冲toa阈值,对每个航天器获取的脉冲toa信号进行筛选;当观测脉冲toa信号超过阈值时,重新赋予其指定值,并将筛选处理后的脉冲toa观测量及相关标志参数传递给下述错序判定模块进一步处理;其中,脉冲toa是指脉冲到达时间;
5、阈值设定模块,与中央导航滤波计算模块进行双向数据交换;并利用预置的脉冲星数据库,结合各航天器的轨道参数,确定各航天器的脉冲toa观测量的置信范围,从而确定toa阈值;
6、错序判定模块,判定所获得的脉冲toa信息对应的导航滤波周期,并通过相应的标志位告知中央导航滤波计算模块;
7、中央导航滤波计算模块,利用各航天器经过筛选后的脉冲toa数据,并结合错序判定模块的相关信息,完成导航定位解算;
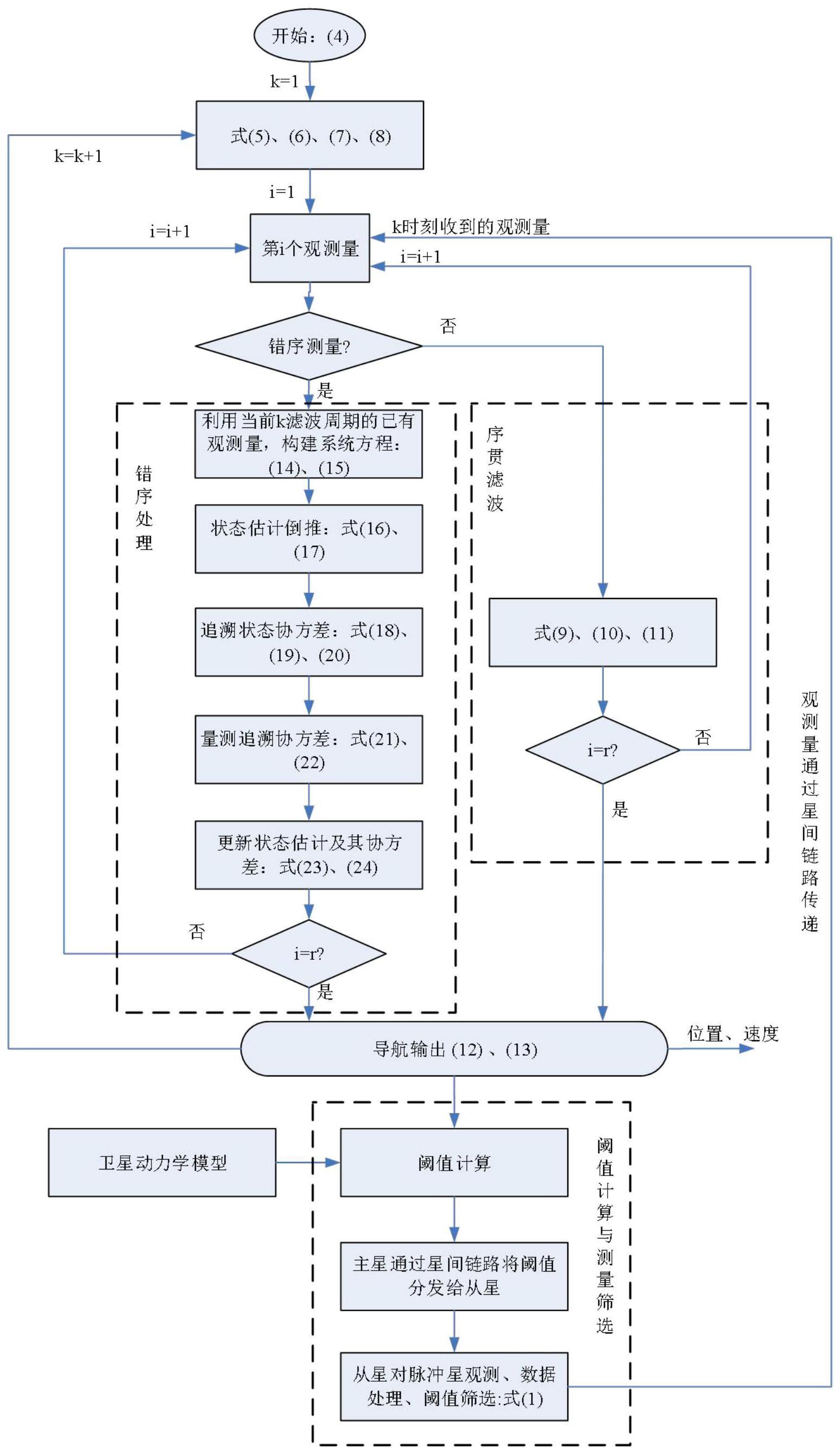
8、所述的方法包括以下步骤:
9、步骤1,主星开启任务,赋予初始位置、速度预估值x0和初始状态估计方差p0,
10、
11、步骤2,初始k=1,利用以下公式进行k时刻的状态和协方差初值计算:
12、
13、
14、
15、
16、步骤3,初始i=1,准备对接收的第i个观测量进行处理;
17、步骤4,判断是否为错序测量;是,转步骤6;否,转步骤5;
18、步骤5,进入序贯处理流程,通过以下公式处理第i个观测量:
19、
20、
21、
22、之后,转步骤7;
23、步骤6,进入错序处理流程,通过以下公式处理第i个观测量,
24、利用当前k滤波周期的已有观测量,构建系统方程:
25、xk=fkxk-1+wk-1(14)
26、
27、状态估计倒推:
28、
29、
30、追溯状态协方差:
31、
32、
33、
34、量测追溯协方差:
35、
36、
37、更新状态估计及其协方差:
38、
39、
40、步骤7,判断是否处理完当前周期所有观测量;是,转步骤8;否,i=i+1,之后转步骤3;
41、步骤8,进入导航输出计算模块,利用下述公式(12)(13)进行导航位置、速度计算;输出位置速度计算结果,并将该结果传递给步骤9;最后,令k=k+1,转步骤2,开始新一轮导航解算;
42、
43、
44、步骤9,接收步骤8传递过来的位置速度计算结果,进行新的阈值计算和测量筛选流程,并将筛选后的观测量纳入到新一轮导航解算流程中。
45、进一步,步骤9中所述的新的阈值计算和测量筛选流程包括以下步骤:
46、步骤91,进行阈值计算;
47、步骤92,主星通过星间链路将阈值分发给从星;
48、步骤93,从星对脉冲星进行观测、数据处理和阈值筛选;
49、其中,阈值筛选利用下述公式:
50、
51、本发明所达到的有益效果为:
52、(1)提供了一套新的具有测量筛选与错序处理功能的脉冲星导航序贯滤波单元组成及实现方法。在序贯滤波过程中,能够同时进行测量筛选处理与错序处理。
53、(2)专门设置了脉冲toa阈值设定和筛选模块,对各个航天器进行脉冲星探测获得的脉冲toa测量值进行动态阈值设定,并利用设定阈值进行脉冲toa测量值的筛选,提供了针对筛选测量的滤波方法,实现了脉冲toa测量值筛选条件下的脉冲星导航滤波计算。
54、(3)由于星间传递延迟等原因,当前滤波周期可能收到上一滤波周期的脉冲toa测量值,针对这种测量值跨周期错序到达的问题,专门设置了脉冲toa测量值错序判定模块,用于判断当前测量值对应的滤波周期,并提供了错序测量处理方法,能够实现对错序测量的处理。
55、(4)在同一滤波周期内,针对各航天器探测到的脉冲toa测量值到达主星时刻不同步的问题,提供了序贯处理的方法。该方法可以直接实时处理不同步的脉冲toa测量值,具有很好的时效性,并合理分配计算资源。而不必等待所有脉冲toa测量值都具备才进行统一处理。
技术特征:
1.一种应用于脉冲星自主导航系统的导航单元及方法,所述的导航单元附着于分布式航天器系统中,所述的方法基于导航单元实现;其特征在于,所述的导航单元包括:
2.根据权利要求1所述的一种应用于脉冲星自主导航系统的导航单元及方法,其特征在于,步骤9中所述的新的阈值计算和测量筛选流程包括以下步骤:
技术总结
本发明涉及空间飞行器脉冲星自主导航技术领域,具体涉及一种应用于脉冲星自主导航系统的导航单元及方法。所述的导航单元附着于分布式航天器系统中,所述的方法基于导航单元实现。首先将各航天器收集的脉冲TOA信息进行阈值筛选,筛选后的TOA信息不会被完全剔除,而是在替换为设定的阈值后送入中央导航滤波计算模块中,然后在中央导航滤波计算模块中进行序贯滤波计算,该计算过程能够对筛选后的所有信息进行序贯地滤波处理。中央导航滤波计算模块也能够结合运动状态信息对各航天器的脉冲TOA筛选阈值进行设定,并可接收其发送的脉冲TOA数据及筛选状态信息,从而实现高精度的滤波计算。本发明在序贯滤波过程中,能够同时进行测量筛选处理与错序处理。
技术研发人员:李璟璟,欧阳晨,宋娟,王博,徐振华,刘金胜,王文丛,徐延庭
受保护的技术使用者:山东航天电子技术研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!