一种基于机器视觉的农作物植株高遥测方法及系统
本发明属于农作物高度测量,更具体地,涉及一种基于机器视觉的农作物株高遥测方法及系统。
背景技术:
1、及时掌握作物性状对科学指导农业生产及研究具有重要意义。株高是动态衡量作物健康和整体生长状况的关键指标,广泛用于估测作物的生物学产量和最终籽粒产量,而传统的人工测量方式存在规模小、效率低以及耗时长等问题。
2、因此,如何解决各大高校农学院及育种研究机构在测量作物性状时由人力不足导致的测量规模小、效率低以及耗时长等问题,实现全自动测量以节约人工成本,成为了本发明的出发点。
3、基于上述原因,本发明提出了一种借助深度相机获取植物根部与顶部深度信息,借助小型履带车在田间泥泞地形下自由穿梭,从而自主测量农作物高度的农作物株高遥测系统,以帮助各大高校农学院及育种研究机构在测量农作物株高时,提高测量效率,降低测量误差。
4、同时,自动化测量设备在运行过程中,也有概率会遭遇杆架歪斜,突发停电等意外情况,对此,应做好相应的处理措施,保证测量的进度和数据储存。
5、随着机器学习、计算机视觉技术的不断发展,目前在农作物高度测量领域,已有利用通过搭建在三脚架上的普通相机拍摄标准刻度尺和植株来获取植株高度的植株高度测量设备,这些设备在一定程度上弥补了传统的人工测量方式存在的规模小、效率低以及误差大等问题。
6、然而,在当前已有的研究中,多点自动旋转式无损双目视觉监测系统虽然实现了极高的精度,但操作步骤复杂,需要五个距离不同的红色特征点组成的自制的校验标靶,操作难度大且繁琐;而标点好的单目数码相机,需要将棉花植株上事先做好的标记点转化为二维空间下的两个关键点坐标,再利用相机参数及约束限定条件,求得植株在世界坐标系中的三维坐标,进而计算株高,该方法无法保证测量精度,误差较大,且需要事先对所要测量的植株进行处理;而平行相机对单株玉米进行高度测量,却仍然受限于只能对单一植株进行静态测量。
7、更为重要的一点是,在实际测量过程中,玉米之间的垄距只有60-70厘米,普通单目相机受限于相机视野无法同时获取玉米根部与顶部的深度信息。
8、针对这些问题,我们在本次创新实验中,运用两个深度相机实现近距离测量,利用深度相机与立体视觉将计算模型简化同时提高精度,利用小型履带车实现对各植株的动态测量,利用机载电脑运行自编程序使图像采集、特征提取、处理一体化,大大简化了操作步骤,提高了效率。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种基于机器视觉的农作物植株高遥测方法,包括:
2、s1、通过深度相机获得农作物植株深度图像;
3、s2、以棋盘格为参照物,计算像素坐标长度与实际长度的转换比例;
4、转换比例k的计算公式如下:
5、
6、式中,lreal为棋盘格的实际长度,lvirtual为棋盘格像素坐标长度,k是转换比例;
7、s3、计算得到农作物植株高的实际长度,实际长度=深度图像的像素坐标长度×转化比例k。
8、进一步地,在相机杆和植株均垂直于水平面的情况下,两深度相机间隔距离为d,在植株顶端和底端分别取a(xt,yt,zt)、b(xb,yb,zb)两点,则植株高度h:
9、h=d+k1(r/2-yt)+k2(yb-r/2);
10、其中k1、k2分别为顶端相机和底端相机的转换比例,r是相机纵向分辨率。
11、进一步地,在相机杆前后倾斜情况下,两深度相机间隔距离为d,在植株顶端和底端分别取a(xt,yt,zt)、b(xb,yb,zb)两点,将植株投影到与相机杆平行的平面上,投影后的植株高度h:
12、h=d+k1(r/2-yt)+k2(yb-r/2);
13、植株高度h:
14、
15、其中δz为植株实际根部或顶部到投影线的垂线长;k1、k2分别为两个深度相机的转换比例。
16、进一步地,设顶端的深度相机仰角α,则有
17、底端的深度相机俯角β,则有则:
18、|δz|=|ztcosα-zbcosβ|。
19、进一步地,在相机杆左右倾斜情况下,将植株投影到与相机杆平行的平面上,顶端的深度相机到植株在相机杆所在平面的投影距离b1为:
20、
21、底端的深度相机到植株在相机杆所在平面的投影距离b2为:
22、
23、相机杆与在相机杆所在平面的植株投影之间的距离b3:
24、
25、由三角形相似关系得到关系式:
26、
27、a1+a2=b3 (2);
28、其中a1+a2为植株底部到相机杆所在直线的距离;
29、设相机杆竖直倾角为ψ,两深度相机间隔距离为d,代入公式求得植株高度h:
30、
31、其中,k1、k2分别为两个深度相机的转换比例。
32、进一步地,通过深度相机获得农作物植株深度图像后,进行像素点的选择和筛选,包括:
33、在目标范围内选取10个像素点,获取像素点的坐标(x,y)与深度depth,删除其中深度depth为0的无效像素点,将剩余有效像素点存入文件中;
34、对文件中的有效像素点按depth的值进行排序,得到中位点mid的坐标position与深度midlen,则为筛选得到的像素点数据。
35、本发明还提出了一种基于机器视觉的农作物植株高遥测系统,用于实现农作物株高遥测方法,包括:遥控车和遥测终端;
36、所述遥控车包括:履带小车、机载电脑、轻质铝合金架和上下两个深度相机;
37、所述履带小车上装有轻质铝合金架,用于固定两个深度相机;
38、所述机载电脑固定于遥控车上,与两个深度相机以及遥测终端相连。
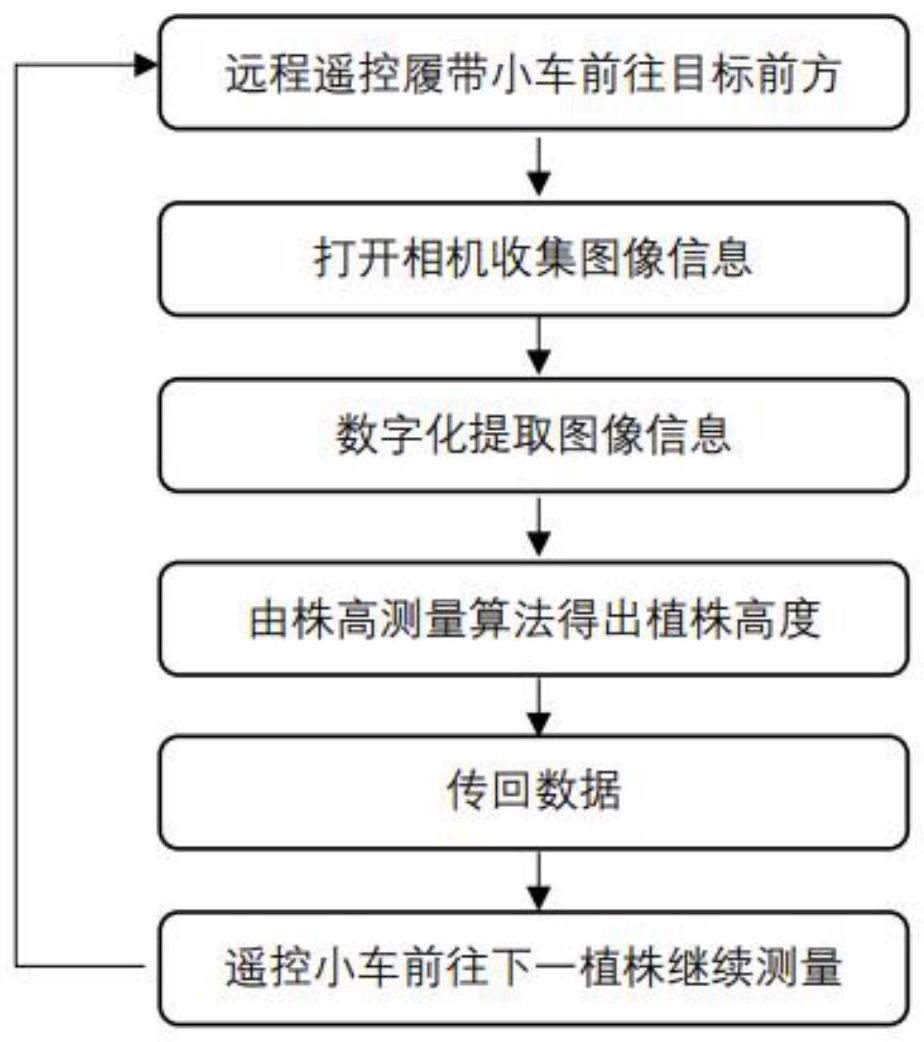
39、所述遥测终端远程操控机载电脑启动两个深度相机,根据回传的机载电脑画面中的彩色图像判断遥控车位置与路况,操作小型履带车前往下一株农作物进行测量。
40、相比于现有技术,本发明具有如下有益技术效果:
41、1.本发明设计了一种基于机器视觉的农作物株高遥测系统,远程遥控履带车移动,通过一杆上下的两个深度相机,收集图像信息,识别提取数据特征进行株高计算,可实现前端近距离株高测量,遥测终端远程操控。在保证计算准确性的基础上,极大解放了人力成本,提高了识别效率。
42、2.视频处理计算方案,将深度相机收集到的深度图图像信息数字化,提取所需的深度数据(坐标与深度),结合两个相机间的已知长度,通过空间几何计算推导将目标的高度计算出来。
43、3.本发明不受地形约束,履带遥控车可在田间泥泞地形下自由穿梭,克服各种地形环境变化导致的相机倾斜对自动化测量的影响。
技术特征:
1.一种基于机器视觉的农作物植株高遥测方法,其特征在于,包括:
2.根据权利要求1所述的基于机器视觉的农作物植株高遥测方法,其特征在于,
3.根据权利要求1所述的基于机器视觉的农作物植株高遥测方法,其特征在于,
4.根据权利要求3所述的基于机器视觉的农作物株高遥测方法,其特征在于,设顶端的深度相机仰角α,则有
5.根据权利要求1所述的基于机器视觉的农作物株高遥测方法,其特征在于,在相机杆左右倾斜情况下,将植株投影到与相机杆平行的平面上,顶端的深度相机到植株在相机杆所在平面的投影距离b1为:
6.根据权利要求1所述的基于机器视觉的农作物株高遥测方法,其特征在于,通过深度相机获得农作物植株深度图像后,进行像素点的选择和筛选,包括:
7.一种基于机器视觉的农作物植株高遥测系统,其特征在于,用于实现如权利要求1-6任意一项所述的农作物株高遥测方法,包括:遥控车和遥测终端;
技术总结
本发明涉及一种基于机器视觉的农作物植株高遥测方法及系统,属于农作物高度测量技术领域,远程遥控履带车移动,通过一杆上下的两个深度相机获得农作物植株深度图像,识别提取数据特征进行株高计算,计算像素坐标长度与实际长度的转换比例,得到农作物植株高的实际长度。可实现前端近距离株高测量,遥测终端远程操控,在保证计算准确性的基础上,极大解放了人力成本,提高了识别效率。
技术研发人员:孙大洋,叶昕禹,田瑞琦,范高乐,张磊,郝琦,李志军
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!