导航线箭头生成方法、装置、电子设备及存储介质与流程
本发明涉及导航线,具体涉及导航线箭头生成方法、装置、电子设备及存储介质。
背景技术:
1、导航线导航是一种比方位线和距离圈导航更方便更实用的方法。导航时使用真运动北向上显示模式,在显示屏面上设置导航线,视其功能可设置一条或多条,使其连接。目前市面上的导航线大体分为两种。一种是根据现有的地图定位数据提前生成的静态导航线,另一种是根据设备操作指令生成的动态导航线。
2、相关技术中,提前生成的静态导航线在固定平直方向上通过箭头的指示,前进方向较为清晰,导航线ui更为美观,但无法与设备操作指令产生明确的互动,如车机地图导航,当触发复杂变向指令时,往往起不到准确的导航示意;根据设备操作指令生成的动态导航线虽然在实时性上更加准确,但往往只画出了纯色的道路或简单的几根线条示意,缺乏明确的方向指示。
技术实现思路
1、有鉴于此,本发明提供了导航线箭头生成方法、装置、电子设备及存储介质,以解决现有的导航缺乏明确的方向指示的问题。
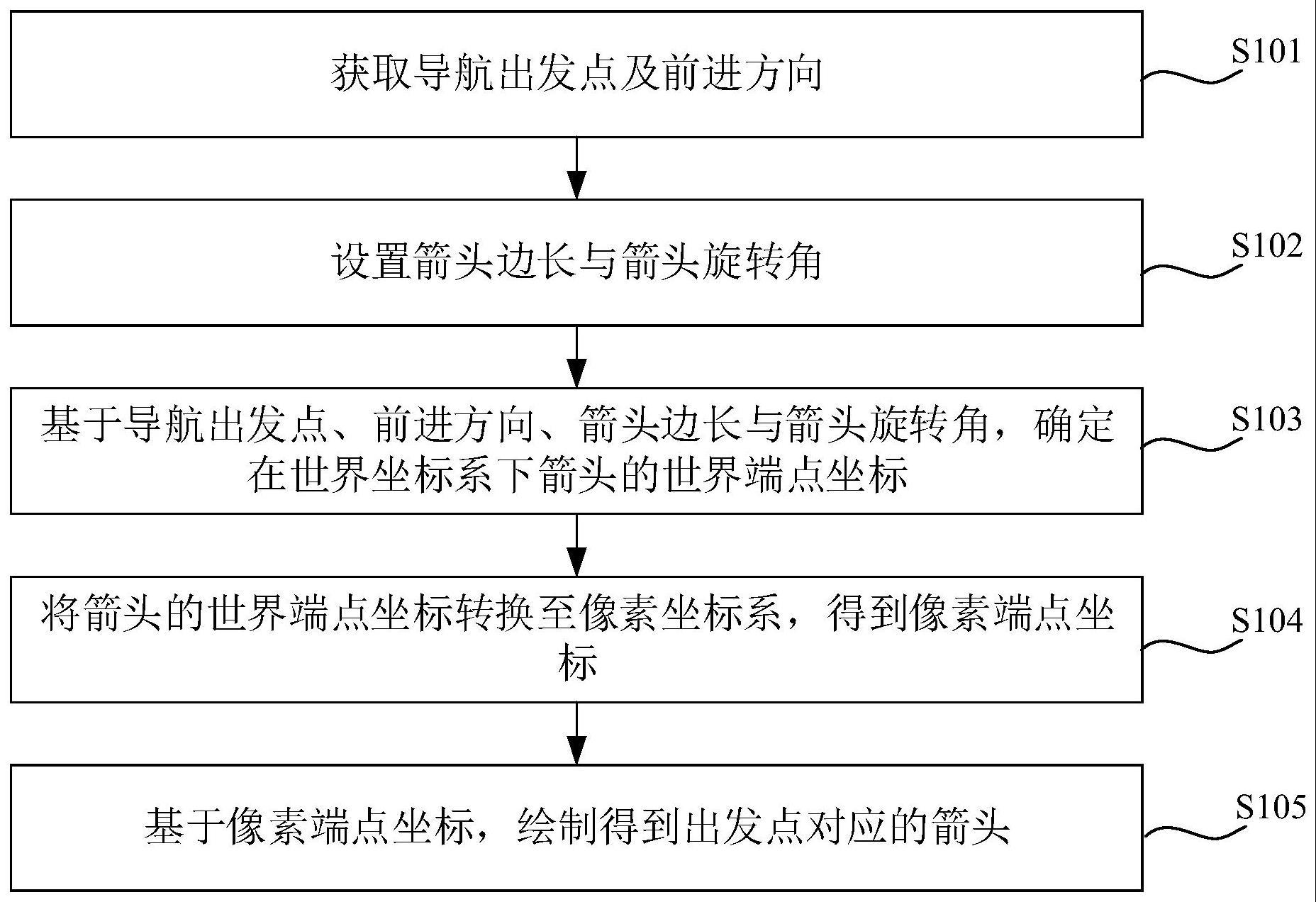
2、第一方面,本发明提供了一种导航线箭头生成方法,方法包括:
3、获取导航出发点及前进方向;
4、设置箭头边长与箭头旋转角;
5、基于导航出发点、前进方向、箭头边长与箭头旋转角,确定在世界坐标系下箭头的世界端点坐标;
6、将箭头的世界端点坐标转换至像素坐标系,得到像素端点坐标;
7、基于像素端点坐标,绘制得到出发点对应的箭头。
8、在本发明中,通过在原有的导航线条上,增加了表明设备前进方向的箭头,可以使用户更为明确设备前进的具体方向,便于用户更为清楚明确地确定设备的前进方向,进一步降低了用户的认知成本。根据实时的导航线,在设备前进方向发生变化时,由于绘制方法是基于原有导航线的角度和坐标生成的箭头,无需改变原有的导航线的算法,实时生成箭头因此箭头实时进行准确的导航示意,且具备即插即用的优势。
9、在一种可选的实施方式中,获取前进方向,包括:
10、建立世界坐标系;
11、基于世界坐标系,确定导航出发点在世界坐标系下的出发点坐标和基点坐标;
12、基于出发点坐标和基点坐标,确定导航轨迹的前进方向角。
13、在该方式中,通过在现有的导航线的基础上,确定导航轨迹的前进方向,便于后续确定符合设备前进方向的箭头指向。
14、在一种可选的实施方式中,基于出发点坐标和基点坐标,确定导航轨迹的前进方向角,包括:
15、基于出发点坐标和基点坐标,构建基点坐标至出发点坐标的前进方向向量;
16、计算前进方向向量和世界坐标系的x轴之间的夹角,得到导航轨迹的前进方向角。
17、在该方式中,通过以前进方向向量和世界坐标系的x轴之间的夹角作为前进方向角,进一步明确了导航轨迹的前进方向,保证了导航轨迹后续生成的箭头方向更为贴近设备实际的前进方向。
18、在一种可选的实施方式中,基于导航出发点、前进方向、箭头边长与箭头旋转角,确定在世界坐标系下箭头的世界端点坐标,包括:
19、基于前进方向角和箭头旋转角,建立辅助向量;
20、对辅助向量进行归一化处理,得到向量方向;
21、基于导航出发点、向量方向和箭头边长,计算得到世界端点坐标。
22、在该方式中,通过建立辅助向量,对辅助向量进行归一化处理得到箭头相对于导航出发点的方向,进而便于确定箭头的端点在世界坐标系下的具体坐标,便于对箭头进行绘制。
23、在一种可选的实施方式中,基于导航出发点、向量方向和箭头边长,计算得到世界端点坐标,包括:
24、将向量方向与箭头边长相乘,得到第二辅助向量;
25、基于第二辅助向量对导航出发点进行移动,得到世界端点坐标。
26、在该方式中,通过向量方向与箭头边长相乘,得到具备箭头端点相对于导航出发点的距离的向量,进而可以确定需要如何移动导航出发点,以得到箭头端点在世界坐标系下的具体坐标。
27、在一种可选的实施方式中,将箭头的世界端点坐标转换至像素坐标系,得到像素端点坐标,包括:
28、获取相机的世界坐标;
29、基于相机的相机信息、世界坐标和基点坐标,确定相机的外参矩阵和内参矩阵;
30、基于相机的外参矩阵,将世界端点坐标转换至相机坐标系,得到相机端点坐标;
31、基于相机的内参矩阵,将相机端点坐标转换至像素坐标系,得到像素端点坐标。
32、在该方式中,通过将箭头端点在世界坐标系下的坐标转换至相机坐标系后,再转换至像素坐标系,确定了箭头端点在像素坐标系下的具体坐标,以便于后续在像素坐标系下对箭头进行绘制。
33、在一种可选的实施方式中,基于像素端点坐标,绘制得到出发点对应的箭头,包括
34、获取屏幕刷新率;
35、根据屏幕刷新率,在每一帧之间进行像素端点坐标计算,绘制得到出发点对应的箭头;
36、和/或,获取鼠标移动的轨迹和鼠标移动采样率的间隔;
37、根据鼠标移动的轨迹和鼠标移动采样率的间隔,在鼠标的输入状态发生改变时,进行像素端点坐标计算,绘制得到出发点对应的箭头。
38、在该方式中,通过实时获取屏幕刷新率在每一帧之间进行导航线箭头的计算和绘制,结合基于像素坐标系下的鼠标移动进行导航线箭头的计算和绘制,实现了实时绘制新的导航线箭头,适用于所有圆形导航,由于基于原有导航线的角度和坐标生成箭头,具备即插即用的优势。
39、第二方面,本发明提供了一种导航线箭头生成装置,装置包括:
40、导航出发模块,用于获取导航出发点及前进方向;
41、箭头设置模块,用于设置箭头边长与箭头旋转角;
42、端点坐标确定模块,用于基于导航出发点、前进方向、箭头边长与箭头旋转角,确定在世界坐标系下箭头的世界端点坐标;
43、坐标转换模块,用于将箭头的世界端点坐标转换至像素坐标系,得到像素端点坐标;
44、箭头绘制模块,用于基于像素端点坐标,绘制得到出发点对应的箭头。
45、第三方面,本发明提供了一种电子设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的导航线箭头生成方法。
46、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的导航线箭头生成方法。
技术特征:
1.一种导航线箭头生成方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取前进方向,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述出发点坐标和所述基点坐标,确定导航轨迹的前进方向角,包括:
4.根据权利要求2所述的方法,其特征在于,所述基于所述导航出发点、所述前进方向、所述箭头边长与所述箭头旋转角,确定在世界坐标系下箭头的世界端点坐标,包括:
5.根据权利要求4所述的方法,其特征在于,所述基于所述导航出发点、所述向量方向和所述箭头边长,计算得到世界端点坐标,包括:
6.根据权利要求2所述的方法,其特征在于,所述将所述箭头的世界端点坐标转换至像素坐标系,得到像素端点坐标,包括:
7.根据权利要求1至6中任一项所述的方法,其特征在于,所述基于所述像素端点坐标,绘制得到所述出发点对应的箭头,包括
8.一种导航线箭头生成装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机指令,所述计算机指令用于使计算机执行权利要求1至7中任一项所述的导航线箭头生成方法。
技术总结
本发明涉及导航线技术领域,公开了导航线箭头生成方法、装置、电子设备及存储介质,包括:获取导航出发点及前进方向;设置箭头边长与箭头旋转角;基于导航出发点、前进方向、箭头边长与箭头旋转角,确定在世界坐标系下箭头的世界端点坐标;将箭头的世界端点坐标转换至像素坐标系,得到像素端点坐标;基于像素端点坐标,绘制得到出发点对应的箭头,本发明通过在原有的导航线条上,增加了表明设备前进方向的箭头,可以使用户更为明确设备前进的具体方向,便于用户更为清楚明确地确定设备的前进方向,进一步降低了用户的认知成本。根据实时的导航线,在设备前进方向发生变化时,箭头实时进行准确的导航示意。
技术研发人员:郑亦龙
受保护的技术使用者:北京行远博见网络科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!