一种探针全方位测量装置及方法与流程
本发明涉及半导体测试,更具体的说,涉及一种探针全方位测量装置及方法。
背景技术:
1、半导体测试是半导体设计、生产、封装、测试流程中的关键环节,其重要性不容忽视。探针作为半导体测试的核心零部件,广泛应用于半导体的芯片设计验证、晶圆测试、成品测试等环节。探针的结构合理性、尺寸误差控制以及针头偏斜等问题,会直接关系到半导体芯片产品的测试与验证效果。因此,生产出的探针必须经过严格的检测和控制,以确保其测试精度和测试效果。
2、目前现有技术要求对生产的探针进行尺寸测量和针尖测量,其中,尺寸测量需要在平躺或者侧面进行,针尖测量需要在探针竖直的情况下对十几微米级的针尖进行测量和判断。视觉系统被用于获取反光面积以辅助检测针尖的尺寸和切割一致性。
3、然而,现有的测量手段仅能通过相机对平躺的探针进行尺寸测量,无法判断探针前后横梁和尾部存在角度误差,以及针尖和尾部可能存在不平行情况。此外,探针本身的翘曲问题也无法精确测量。翘曲导致探针卡里的针尖位置偏差过多,从而无法导通实现正常的测试功能,进而导致整块探针卡无法正常使用。
4、此外,翘曲还可能导致探针互相搭在一起,产生短路,严重影响探针卡的测试性能。探针的针尖也无法得到有效的检测及判别,这会导致后续工作中出现了大量不符合要求的探针。
5、针尖问题会导致无法实现穿刺功能,即使针尖位置正确也无法使探针卡正常实现测试功能。此外,针尖高度出现较大的高低差,导致此探针在探针卡上的高度位置不正确,同样无法实现测试功能。
6、由于上述这些问题,出现大量的筛选探针操作,导致在测量探针的步骤上浪费了大量时间。此外,后续生产中的不良品居多,导致生产任务整体效率偏低,生产计划无法达成。
技术实现思路
1、本发明的目的是提供一种探针全方位测量装置及方法,解决现有技术对探针无法做到有效检测和判别的问题。
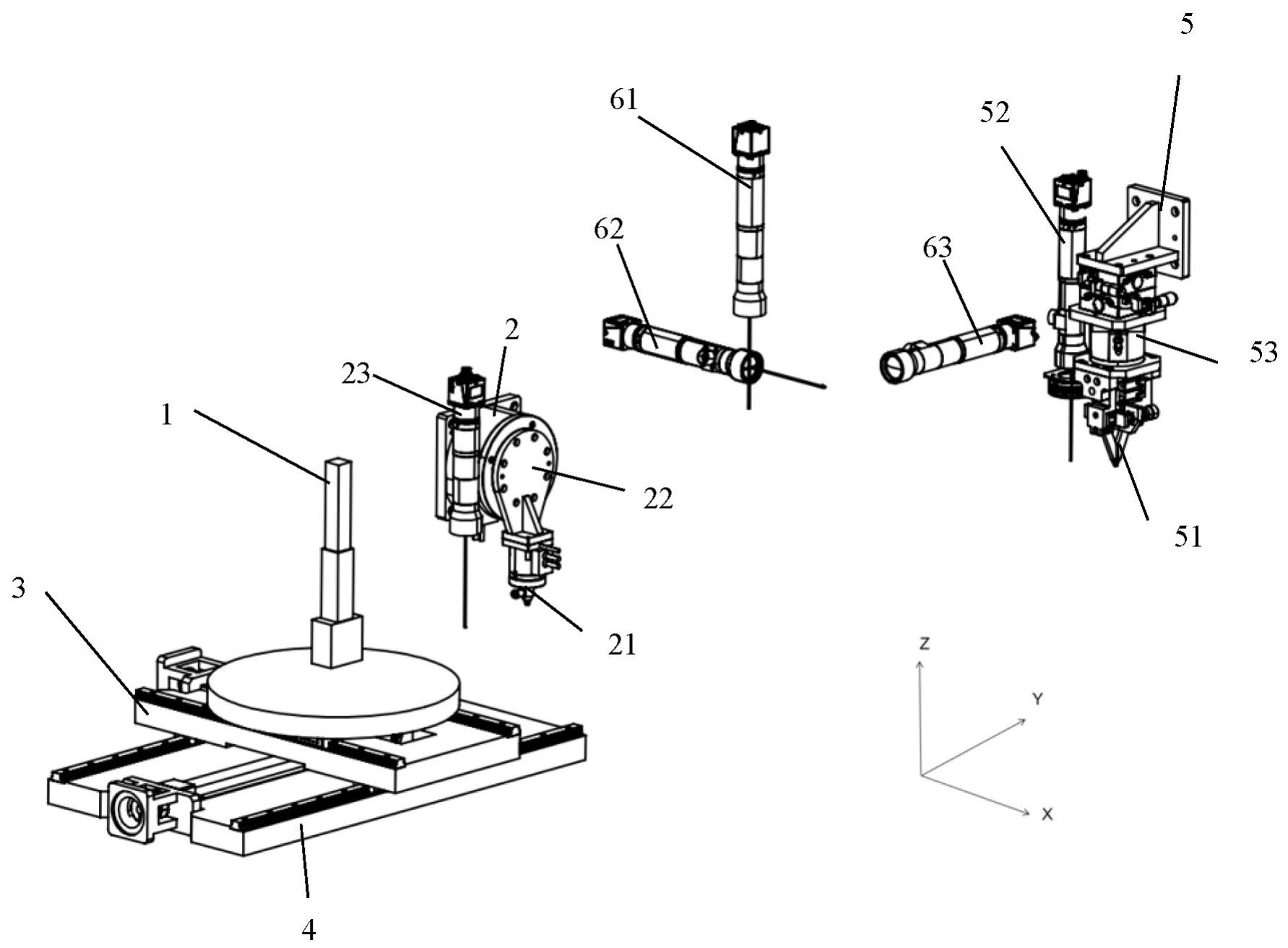
2、为了实现上述目的,本发明提供了一种探针全方位测量装置,包括3d扫描设备、吸取探针结构、载盘、夹取探针结构以及若干测量相机:
3、所述载盘,用于摆放所需测量的探针;
4、所述3d扫描设备,用于对探针进行形态扫描,对探针在测量平面的平整度进行测量与判断,获得探针的初步形态趋势;
5、所述吸取探针结构,用于在扫描完成后吸取探针并调节探针位置,使得探针指向特定方向;
6、所述夹取探针结构,用于从吸取探针结构处夹取探针并移动至测量位置;
7、所述若干测量相机,安装在测量位置对应的若干功能区域,从不同测量方向对探针在多个空间维度上进行识别、测量与判断,最终获得探针全方位的形态与尺寸数据。
8、在一实施例中,所述3d扫描设备、吸取探针结构和载盘安装在扫描工位区域。
9、在一实施例中,所述夹取探针结构以及若干测量相机安装在相机识别工位区域。
10、在一实施例中,所述3d扫描设备的扫描幅面为1mm×1mm至6mm×6mm;
11、所述3d扫描设备的扫描精度为2微米以内。
12、在一实施例中,所述吸取探针结构,包括吸嘴、机械摆臂、吸取探针相机、旋转轴以及第一基座:
13、所述吸嘴,安装在机械摆臂的一端,用于吸取探针;
14、所述旋转轴,安装在机械摆臂的另一端;
15、所述机械摆臂,安装在第一基座上,围绕旋转轴旋转,调整吸嘴的指向以及探针方向;
16、所述吸取探针相机,安装在第一基座上,位于机械摆臂一侧,对吸嘴以及探针的相对位置进行测量。
17、在一实施例中,所述吸嘴的直径小于探针宽度。
18、在一实施例中,所述装置还包括若干运动轴,用于提供轴向移动:
19、所述载盘,安装在运动轴上进行轴向移动。
20、在一实施例中,所述夹取探针结构,包括夹爪、夹取探针相机和第二基座:
21、所述夹爪,安装在第二基座的底部,用于夹取探针;
22、所述夹取探针相机,安装在第二基座的侧部,对夹爪以及探针的相对位置进行测量。
23、在一实施例中,所述若干测量相机,包括第一测量相机、第二测量相机和第三测量相机:
24、所述第一测量相机被固定在测量位置的上方,测量方向为竖直方向,用于判断探针在竖直方向是否存在倾斜或者偏折;
25、所述第二测量相机被固定在探针的一侧,测量方向为水平横向,用于判断探针在水平横向一侧是否存在倾斜或者偏折;
26、所述第三测量相机被固定在探针的另一侧,与第一测量相机、第二测量相机的测量方向相垂直,测量方向为水平纵向,用于判断探针在水平纵向一侧是否存在倾斜或者偏折。
27、在一实施例中,所述第一测量相机,用于判断探针横梁是否存在弯曲,以及对探针的针尖进行定点测量和筛选。
28、在一实施例中,所述测量相机的倍率为10-40倍,根据不同的探针针尖参数进行确定。
29、为了实现上述目的,本发明提供了一种探针全方位测量方法,包括以下步骤:
30、步骤s1、扫描阶段,通过3d扫描设备对探针进行形态扫描,对探针在测量平面的平整度进行测量与判断,获得探针的初步形态趋势;
31、步骤s2、相机识别阶段,通过安装在测量位置对应的功能区域的若干测量相机,从不同测量方向对探针在多个空间维度进行识别、测量与判断,获得探针全方位的形态与尺寸数据。
32、在一实施例中,所述步骤s1,进一步包括:在扫描完成后,将探针保持在竖直状态,移动到测量位置。
33、在一实施例中,所述步骤s2,进一步包括:
34、将三个测量相机设置在测量位置的对应功能区域,从三个不同的测量方向对探针在三维空间内不同面进行识别、测量与判断。
35、在一实施例中,所述步骤s2,进一步包括:
36、将第一测量相机固定在测量位置的上方,测量方向为竖直方向,测量判断探针在竖直方向是否存在倾斜或者偏折;
37、将第二测量相机被固定在探针的一侧,测量方向为水平横向,测量判断探针在水平横向一侧是否存在倾斜或者偏折;
38、将第三测量相机被固定在探针的另一侧,与第一测量相机、第二测相机的测量方向相垂直,测量方向为水平纵向,测量判断探针在水平纵向一侧是否存在倾斜或者偏折。
39、在一实施例中,所述步骤s2,进一步包括:
40、通过第一测量相机对探针的针尖进行定点测量和筛选。
41、在一实施例中,所述步骤s2,进一步包括:
42、根据不同的探针针尖参数进行确定测量相机的选型。
43、本发明提供的一种探针全方位测量装置以及方法,可以对整个探针以及针尖进行全方位测量,从而直观地判断探针的全方位尺寸和平整度,有效筛选适用于探针卡的探针,降低工作成本并提高整体流程的工作效率。
技术特征:
1.一种探针全方位测量装置,其特征在于,包括3d扫描设备、吸取探针结构、载盘、夹取探针结构以及若干测量相机:
2.根据权利要求1所述的探针全方位测量装置,其特征在于,所述3d扫描设备的扫描幅面为1mm×1mm至6mm×6mm;
3.根据权利要求1所述的探针全方位测量装置,其特征在于,所述吸取探针结构,包括吸嘴、机械摆臂、吸取探针相机、旋转轴以及第一基座:
4.根据权利要求3所述的探针全方位测量装置,其特征在于,所述吸嘴的直径小于探针宽度。
5.根据权利要求1所述的探针全方位测量装置,其特征在于,还包括若干运动轴,用于提供轴向移动:
6.根据权利要求1所述的探针全方位测量装置,其特征在于,所述夹取探针结构,包括夹爪、夹取探针相机和第二基座:
7.根据权利要求1所述的探针全方位测量装置,其特征在于,所述若干测量相机,包括第一测量相机、第二测量相机和第三测量相机:
8.根据权利要求7所述的探针全方位测量装置,其特征在于,所述第一测量相机,用于判断探针横梁是否存在弯曲,以及对探针的针尖进行定点测量和筛选。
9.根据权利要求1所述的探针全方位测量装置,其特征在于,所述测量相机的倍率为10-40倍,根据不同的探针针尖参数进行选择确定。
10.一种探针全方位测量方法,其特征在于,包括以下步骤:
11.根据权利要求10所述的探针全方位测量方法,其特征在于,所述步骤s1,进一步包括:在扫描完成后,将探针保持在竖直状态,移动到测量位置。
12.根据权利要求10所述的探针全方位测量方法,其特征在于,所述步骤s2,进一步包括:
13.根据权利要求12所述的探针全方位测量方法,其特征在于,所述步骤s2,进一步包括:
14.根据权利要求13所述的探针全方位测量方法,其特征在于,所述步骤s2,进一步包括:
15.根据权利要求13所述的探针全方位测量方法,其特征在于,所述步骤s2,进一步包括:
技术总结
本发明涉及半导体测试技术领域,更具体的说,涉及一种探针全方位测量装置及方法。本装置,包括3D扫描设备、吸取探针结构、载盘、夹取探针结构以及若干测量相机:载盘用于摆放所需测量的探针;3D扫描设备用于对探针进行形态扫描;吸取探针结构用于在扫描完成后吸取探针并调节探针位置,使得探针指向特定方向;夹取探针结构用于从吸取探针结构处夹取探针并移动至测量位置;若干测量相机安装在测量位置对应的若干功能区域,从不同测量方向对探针进行识别、测量与判断,获得探针全方位的形态与尺寸数据。本发明可以对整个探针以及针尖进行全方位测量,直观地判断探针的全方位尺寸和平整度,有效筛选适用于探针卡的探针。
技术研发人员:汪明涛,罗雄科,邹斌
受保护的技术使用者:上海泽丰半导体科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!