一种基于自调整次选粒子群的光学元件子孔径拼接方法
本发明涉及光学测量的,特别涉及一种基于自调整次选粒子群的光学元件子孔径拼接方法。
背景技术:
1、随着光学精密元部件技术的发展,高精度大口径光学元件已应用于天文观测,光学成像、显示、强激光以及航空航天等多个领域。光学元件的面形质量直接影响了光学系统的检测质量。因此为了确保光学系统的精度,确保光学元件的面形质量就显得尤为重要。干涉检测法是一种非接触式的检测技术。该技术可以利用光在两不同表面反射形成的干涉条纹进行分析得出光学元器件的面形质量信息。
2、干涉仪在三维形貌测量领域有着十分重要的作用,通过对获取干涉条纹进行相位解包裹,可以以非接触、高精度的方式得到物品的三维形貌。
3、通常利用干涉仪其检测大口径光学元件采用直接检测法,这就需要干涉仪需要完全覆盖住被测物,这就要保证干涉仪标准镜的尺寸要大于被测物,然而大口径的干涉仪器无疑会造成成本的增加。而采用子孔径拼接技术可以利用小口径干涉仪来得到完整的大口径光学元件面形信息,这样做减少了成本,并且不用单独为平面镜配置相同或更大口径的干涉仪。拼接技术的关键是要减小子孔径间的误差,一类方法是利用机械定位法、标记点法、立体视觉法,该类方法可以较好的消除子孔径的定位误差,但是操作步骤繁琐、费时;其余的还要利用计算机迭代算法计算重叠区域相位数据来进行误差分析,该类方法通常运用最小二乘法,但是对于多误差参数情况下最小二乘法无法快速精确的复原误差,导致精度低下。
技术实现思路
1、针对现有技术中存在的不足之处,本发明的目的是提供一种基于自调整次选粒子群的光学元件子孔径拼接方法,快速、精确的补偿子孔径误差,无需额外硬件、减少成本。为了实现根据本发明的上述目的和其他优点,提供了一种基于自调整次选粒子群的光学元件子孔径拼接方法,包括:
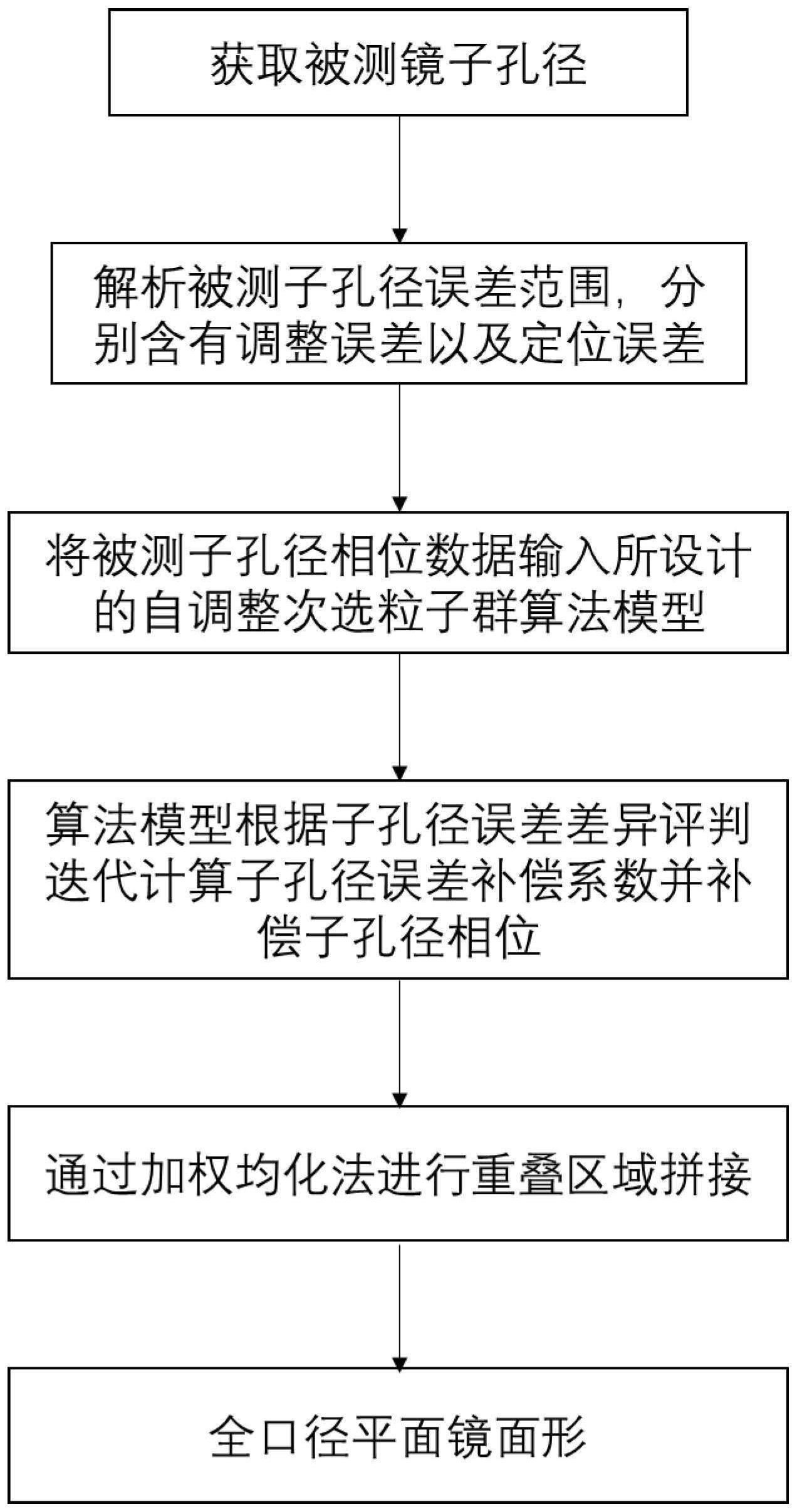
2、s1、通过算法及自动电控台配合ccd相机,采用圆形拼接方式将大口径平面镜相位面形自动分割为多个子孔径,获取被测平面镜子孔径;
3、s2、解析被测子孔径误差范围,且该误差范围包括调整误差与定位误差;
4、s3、根据子孔径的调整误差与定位误差设计自调整次选粒子群算法模型;
5、s4、自调整次选粒子群算法模型根据被测子孔径误差差异评判迭代计算补偿子孔径误差,调整子孔径误差系数;
6、s5、基于补偿误差系数后的子孔径重新进行拼接,并利用加权均化法计算优化重叠区域,完成子孔径误差。
7、优选的,步骤s2中将子孔径进行叠加产生重叠区域,并按照下述算法进行计算:
8、value=rms(woverlap1-woverlap2),
9、其中woverlap1、woverlap2分别为两相邻子孔径重叠区域相位数据,rms指代均方根,利用该方法判断子孔径误差,value为误差值;其中value数值大于等于0,该数值越小则可说明重叠区域越接近,为0则说明完全重合;使得补偿值x更接近误差值,使得补偿后两子孔径拼接后的面形信息越接近原始面形信息。
10、优选的,步骤s3中子孔径在平移定位的过程中会出现根据平移而产生的调整误差以及根据定位会产生的定位误差,进行确定子孔径误差参数,设w1与w2分别为两个相邻子孔径,对w1与w2进行子孔径拼接,通过在笛卡尔坐标系下,w1与w2的位置关系可以表示为如下:
11、w1(x,y,z)=w2(x+δx,y+δy,z)+ax+by+cz+edx+fdy+θ(xdx-ydy)
12、其中x、y、z分别为w1与w2在笛卡尔坐标系下的三轴坐标;δx与δy为w1与w2两者之间的相对位移量,a为w2的x轴倾斜斜率,b为y轴倾斜斜率,c为z轴的位移量系数;dx、dy分别为x与y轴向的梯度;e、f为x与y轴的定位误差,θ为z轴的角度定位误差。
13、优选的,步骤s3中自调整次选粒子群算法模型包括以下步骤:
14、将子孔径的6个误差参数作为算法输入系数;设置阈值,限制边界条件防止算法初值及解空间位置无约束计算;
15、随机设置初始值,通过步骤s2中的子孔径差异度进行迭代计算;
16、在预设的前80%次迭代时进行正常迭代计算,更新最优解,在后20%次迭代将当前value与最优value进行对比,若当前value小于最优value时算法仍旧正常迭代,反之则进行一次概率判断,具体公式如下:
17、
18、其中prob为计算的概率值,valuepbest为前粒子组的最佳判别值,valuet为t次迭代下判别值,同时设定一个判别阈值,若该判别阈值小于prob则以次优解进行下一次的迭代计算,否则使用原始解进行下一次的迭代;
19、经过一次迭代后会经过一次惯性权重迭代,具体算法如下:
20、
21、其中,ω为当前惯性权重ωmax、ωmin分别为预设好的最大及最小惯性权重,该权重算法可以自适应的平衡局部搜索及全局搜索能力;
22、速度迭代公式如下:
23、
24、其中c1为自我认知度,ac1为自我认知度初值,算法中设为2.0,c2为社会认知度,决定个体在群体中的影响,本算法设置为1.5;pbest为当前粒子的个体最优解,gbest为整体最优解,tcur为当前的退火温度初值设置为100,sak为退火速率,决定当前退火温度,设置为0.98,t为当前的迭代次数,即每次迭代都会让当前的退火温度减少至0.98倍;当概率prob大于判别阈值时,c1随迭代次数的增大而逐渐减小;
25、更新最优解位置:x=x+v。
26、优选的,步骤s4中将各个子孔径相位信息输入自调整次选粒子群算法模型,自动设置中心子孔径为基准孔径,并将其余子孔径通过本发明算法计算出最优补偿值,并进行误差系数的补偿,修复子孔径调整及定位误差。
27、优选的,步骤s5中将步骤s4中所获得的误差系数补偿值反馈回补偿公式中:
28、w1(x,y,z)=w2(x+δx,y+δy,z)+ax+by+cz+edx+fdy+θ(xdx-ydy)
29、并对子孔径相位值进行误差补偿,所得补偿后子孔径经过加权均化法对重叠区域复原,得到拼接后图形;
30、加权均化法公式如下:
31、
32、其中w(x,y)为拼接后重叠相位值,woverlap(x,y)为拼接前重叠区域相位值,r为中心子孔径半径,n为重叠区域所覆盖子孔径个数,d为重叠上某点距离中心子孔径圆心距离。
33、本发明与现有技术相比,其有益效果是:利用计算机迭代法可以有效降低成本,简化步骤,采用粒子群算法结合本发明中的自适应权重调整以及含阈值的次选算法可以有效的提高算法精度,还原正确的拼接面形信息。可以有效对子孔径进行拼接复原,该无需高精度电控位移台,以及其他调整硬件。可以有效降低对硬件的需求与设备成本。
技术特征:
1.一种基于自调整次选粒子群的光学元件子孔径拼接方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种基于自调整次选粒子群的光学元件子孔径拼接方法,其特征在于,步骤s2中将子孔径进行叠加产生重叠区域,并按照下述算法进行计算:
3.如权利要求2所述的一种基于自调整次选粒子群的光学元件子孔径拼接方法,其特征在于,步骤s3中子孔径在平移定位的过程中会出现根据平移而产生的调整误差以及根据定位会产生的定位误差,进行确定子孔径误差参数,设w1与w2分别为两个相邻子孔径,对w1与w2进行子孔径拼接,通过在笛卡尔坐标系下,w1与w2的位置关系可以表示为如下:
4.如权利要求3所述的一种基于自调整次选粒子群的光学元件子孔径拼接方法,其特征在于,步骤s3中自调整次选粒子群算法模型包括以下步骤:
5.如权利要求4所述的一种基于自调整次选粒子群的光学元件子孔径拼接方法,其特征在于,步骤s4中将各个子孔径相位信息输入自调整次选粒子群算法模型,自动设置中心子孔径为基准孔径,并将其余子孔径通过本发明算法计算出最优补偿值,并进行误差系数的补偿,修复子孔径调整及定位误差。
6.如权利要求5所述的一种基于自调整次选粒子群的光学元件子孔径拼接方法,其特征在于,步骤s5中将步骤s4中所获得的误差系数补偿值反馈回补偿公式中:
技术总结
本发明公开了一种基于自调整次选粒子群的光学元件子孔径拼接方法,包括:S1、通过算法及自动电控台配合CCD相机,采用圆形拼接方式将大口径平面镜相位面形自动分割为多个子孔径,获取被测平面镜子孔径;S2、解析被测子孔径误差范围,且该误差范围包括调整误差与定位误差;S3、根据子孔径的调整误差与定位误差设计自调整次选粒子群算法模型;S4、自调整次选粒子群算法模型根据被测子孔径误差差异评判迭代计算补偿子孔径误差,调整子孔径误差系数;S5、基于补偿误差系数后的子孔径重新进行拼接,并利用加权均化法计算优化重叠区域,完成子孔径误差。根据本发明,无需高精度电控位移台,以及其他调整硬件有效降低对硬件的需求与设备成本,快速、精确的补偿子孔径误差。
技术研发人员:张雷洪,蒋宸哲,周智轩,韩森,徐凤春,徐邦联,张大伟
受保护的技术使用者:上海理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!