基于可见光和红外光融合的导电线异常检测方法与装置
本发明涉及导电线异常检测技术,特别是一种基于可见光和红外光融合的导电线异常检测方法与装置。
背景技术:
1、目前,导电线异常检测在电力系统管理中扮演着重要的角色。目前常见的导电线异常检测方法有:
2、滑动窗口法:滑动窗口法是最常见的方法之一。它使用一个固定大小的窗口在时间序列数据上滑动,利用窗口内数据的统计特征来检测异常。然而,这种方法容易受到窗口大小的选择影响。如果窗口太小,可能无法准确捕捉到导线异常;如果窗口太大,又可能导致高误报率。
3、基于统计模型的方法:基于统计模型的方法建立了导线正常运行的模型,并使用统计分析技术来检测异常。常见的统计模型包括高斯分布模型和指数分布模型等。然而,这些方法需要事先建立可靠的模型,对于多变量输入的情况,模型的建立和参数估计可能非常困难。
4、基于机器学习的方法:近年来,基于机器学习的方法变得越来越流行。这些方法可以自动学习数据的特征和规律,并能够处理大量的多变量输入数据。常见的机器学习算法包括支持向量机(svm)、人工神经网络(ann)和决策树等。然而,这些方法需要大量的标记样本和计算资源,并且模型的解释性较差。
5、基于深度学习的方法:基于深度学习的方法是目前最热门和最先进的导线异常检测方法之一。深度学习模型如卷积神经网络(cnn)、长短期记忆网络(lstm)等可以自动从原始数据中学习特征,并具有很强的表达能力。然而,深度学习方法需要大量的训练数据和计算资源,模型的训练过程较为复杂。
6、综上,目前的导线异常检测方法取得了一定的进展,但仍然存在一些不足之处。有些方法需要建立可靠的模型或大量的标记样本,这在实际应用中可能较为困难。另外,一些方法对于多变量输入数据的处理能力相对较弱,难以应对复杂的导线异常情况。此外,部分方法需要大量的计算资源和时间,导致实时性较差。
技术实现思路
1、本发明的目的在于提供一种基于可见光和红外光融合的导电线异常检测方法与装置,使用可见光摄像头可以获取导电线外径形状和表面等信息,使用红外光摄像头可以获取导电线温度等内部不可见信息。
2、实现本发明目的的技术解决方案为:第一方面,本发明提供一种基于可见光和红外融合的导电线异常检测方法,包括以下步骤:
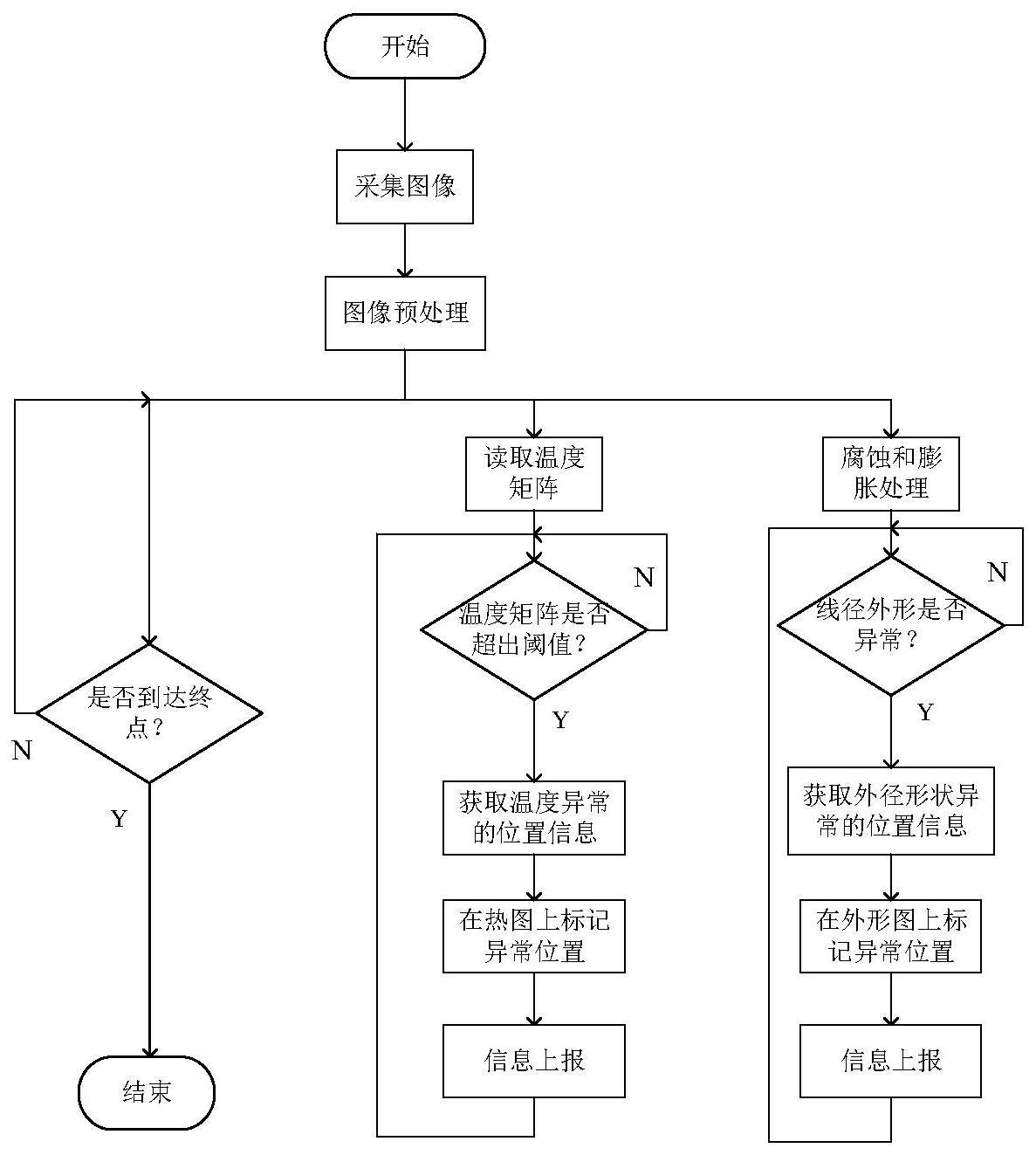
3、步骤1、当移动平台运动时,图像采集模块采集输电导线的相关数据信息,包括输电导线外形、温度;
4、步骤2、主控制器对上一步中采集的信息进行处理,得到导电线的实际线径外形、灰度值及内部温度;
5、步骤3、分别将上一步处理得到的导电线外部和内部数据与参考数据进行对比,综合确定异常位置;
6、步骤4、将得到的异常位置信息上报上级控制系统进行下一步处理。
7、第二方面,本发明提供一种基于可见光和红外融合的导电线异常检测装置,用于实现第一方面所述的基于可见光和红外融合的导电线异常检测方法,该装置为带有顶升结构的轮式巡线机器人,包括:
8、升降装置,用于搭载从动轮;
9、机箱,用于放置机器人主控制器、主动轮驱动电机及驱动器、顶升装置驱动电机及驱动器、通信模块、锂电池组以及连接线缆;
10、机箱外侧,安装图像采集模块,包含可见光相机和红外相机,分别用于采集输电导线的外形与内部温度信息。
11、进一步的,图像采集模块朝向机器人前进方向。
12、进一步的,所述可见光相机用于检测导电线外径形状缺陷和表面明显缺陷,图像采集模块采集图像,分别使用霍夫变换法和腐蚀膨胀法对图像进行处理,判断导电线的外径形状以及表面有无异常出现;如有异常出现,则主控制器计算出异常的空间位置,类型和尺寸信息,并将结果发送至上级控制系统;红外相机用于导线内部的高温异常检测,将相机输出的温度矩阵与高温异常的阈值进行对比,确定高温异常是否存在。
13、进一步的,将温度矩阵转换为热图,对比可见光图像,得到缺陷所在的像素坐标。
14、第三方面,本发明提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如第一方面所述的方法的步骤。
15、第四方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的方法的步骤。
16、与现有技术相比,本发明的显著优点在于:(1)该装置使用多回路反馈系统,精度较高;(2)采用可见光与红外光融合检测方法,同时兼顾线缆外部与内部的缺陷检测,更为安全可靠。
技术特征:
1.一种基于可见光和红外融合的导电线异常检测方法,其特征在于,包括以下步骤:
2.根据权利要求1中所述的一种基于可见光和红外融合的导电线异常检测方法,其特征在于,步骤1中图像采集时,导电线上每个位置信息采集的次数大于3次。
3.根据权利要求1中所述的一种基于可见光和红外融合的导电线异常检测方法,其特征在于,对于步骤2中获得的数据的处理方法,具体为:
4.根据权利要求1中所述的一种基于可见光和红外融合的导电线异常检测方法,其特征在于,步骤3中确定异常位置的方法,具体为:
5.一种基于可见光和红外融合的导电线异常检测装置,其特征在于,用于实现权利要求1所述的基于可见光和红外融合的导电线异常检测方法,该装置为带有顶升结构的轮式巡线机器人,包括:
6.根据强烈要求5所述的基于可见光和红外融合的导电线异常检测装置,其特征在于,图像采集模块朝向机器人前进方向。
7.根据强烈要求5所述的基于可见光和红外融合的导电线异常检测装置,其特征在于,所述可见光相机用于检测导电线外径形状缺陷和表面明显缺陷,图像采集模块采集图像,分别使用霍夫变换法和腐蚀膨胀法对图像进行处理,判断导电线的外径形状以及表面有无异常出现;如有异常出现,则主控制器计算出异常的空间位置,类型和尺寸信息,并将结果发送至上级控制系统;红外相机用于导线内部的高温异常检测,将相机输出的温度矩阵与高温异常的阈值进行对比,确定高温异常是否存在。
8.根据强烈要求7所述的基于可见光和红外融合的导电线异常检测装置,其特征在于,将温度矩阵转换为热图,对比可见光图像,得到缺陷所在的像素坐标。
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-4中任一所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-4中任一所述的方法的步骤。
技术总结
本发明公开了一种基于可见光和红外光融合的导电线异常检测方法与装置,方法包括:当移动平台运动时,图像采集模块采集输电导线的相关数据信息,包括输电导线外形、温度;主控制器对上一步中采集的信息进行处理,得到导电线的实际线径外形、灰度值及内部温度;分别将上一步处理得到的导电线外部和内部数据与参考数据进行对比,综合确定异常位置;将得到的异常位置信息上报上级控制系统进行下一步处理。本发明通过搭载相机的轮式巡线机器人近距离检测线缆,巡检的安全性与准确性高,对线径线缆检测的精确性具有重大意义。
技术研发人员:黄轶琳,何晓玲,乔佳文,樊卫华
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!