dTOF测距方法及系统与流程
本申请涉及光学测量,特别是涉及一种dtof测距方法及dtof测距系统。
背景技术:
1、tof(time of flight,飞行时间)包括dtof(direct time-of-flight,直接测量飞行时间)和itof(indirect time-of-flight,间接测量飞行时间)两种。这类测距系统通常会搭配rgb镜头使用,如在对焦、ar(augmented reality,增强现实),避障应用场景中。
2、相关技术中,tof测距系统镜头是固定焦距,如果rgb镜头为变焦镜头,当rgb镜头的焦距放大的时候,由于tof测距系统镜头的角分辨率不变,那么在相应视角下留下的有效分辨率就会不足,导致深度像素分辨率降低,深度信息太少,会影响目标识别的精准性。举例来说,装载tof辅助对焦元件的单反相机,在转动对焦环调焦的时候,即使放大视场角,角分辨率也是不能被调高的。手机摄影中,tof对焦在从主摄切换到远摄的时候,固定像素大小的tof传感器,在相对放大的视场角,对焦角分辨率会不足。而若采取扩大tof器件的像素数量的方式来弥补分辨率不足的弊端,就需增大感光面积,进而增加芯片成本,增加光学系统成本,降低空间利用效率,实用性差。
3、鉴于此,实现测距系统低成本且高效地动态改变角分辨率,是所属领域技术人员需要解决的技术问题。
技术实现思路
1、本申请提供了一种dtof测距方法及dtof测距系统,可以实现低成本且高效地动态改变角分辨率。
2、为解决上述技术问题,本申请提供以下技术方案:
3、本申请一方面提供了一种dtof测距方法,包括:
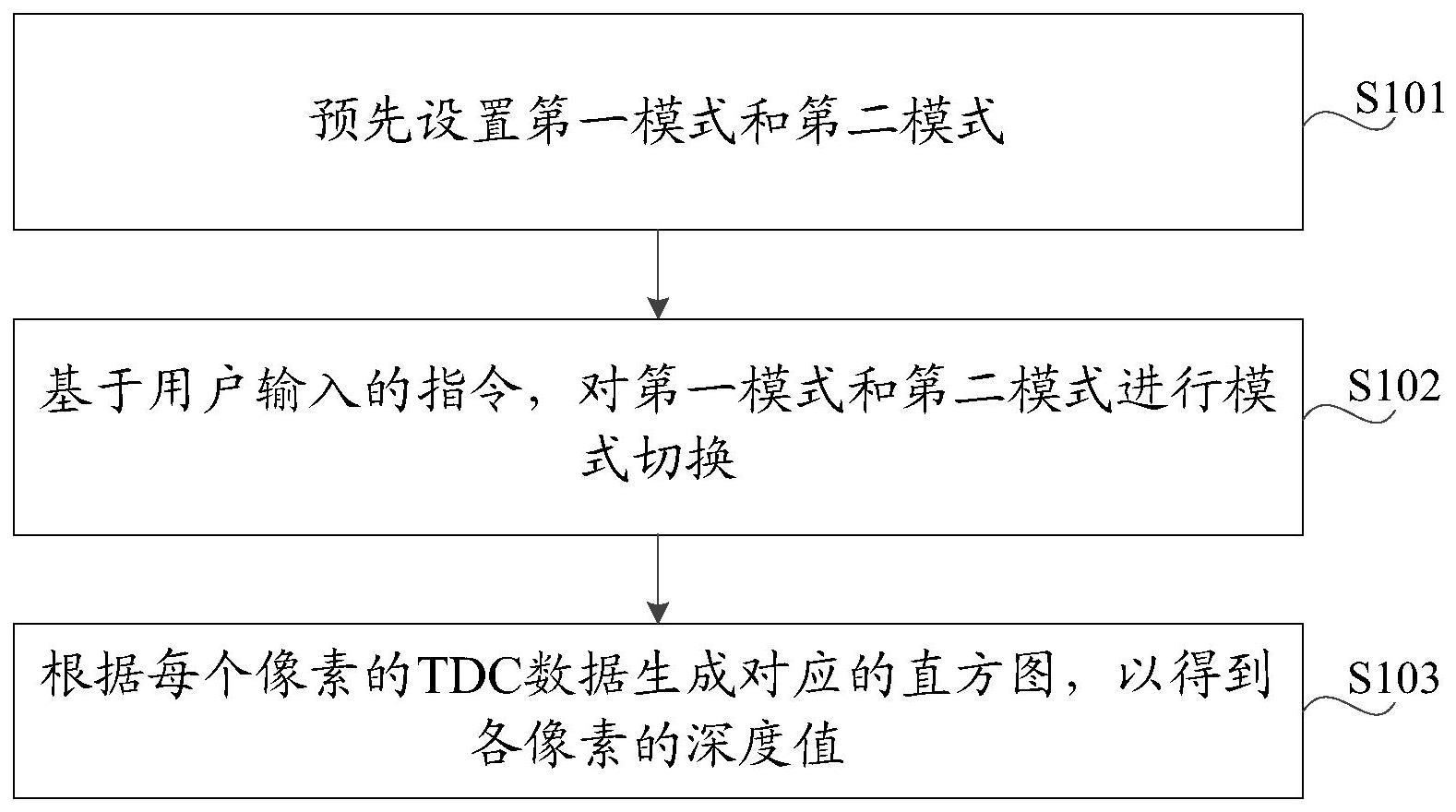
4、预先设置第一模式和第二模式;其中,所述第一模式根据第一区域位置信息打开相应的spad,根据第一像素构成数量,将每个像素的数据通过tdc阵列输出;所述第二模式根据第二区域位置信息打开相应的spad,根据第二像素构成数量,将每个像素的数据通过tdc阵列输出;
5、基于用户输入的指令,对所述第一模式和所述第二模式进行模式切换;
6、根据每个像素的tdc数据生成对应的直方图,以得到各像素的深度值;
7、其中,所述第一区域位置信息包括spad阵列第一区域的区块尺寸和spad位置;所述第二区域信息包括spad阵列第二区域的区块尺寸和spad位置;所述第一区域面积大于所述第二区域面积,所述第一像素构成数量大于所述第二像素构成数量。示例性的,所述第一区域和所述第二区域包括相同或完全不同的spad。
8、示例性的,所述第一像素构成数量为所述第一模式下的每个像素包含的spad数量;所述第二像素构成数量为所述第二模式下的每个像素包含的spad数量;所述第一像素构成数量和所述第二像素构成数量不相等。
9、示例性的,所述第一区域的区块面积大于所述第二区域的区块面积,则所述第一像素构成数量大于所述第二像素构成数量。
10、示例性的,所述基于用户输入的指令之前,还包括:
11、通过dtof设备的i2c接口获取用户输入的指令。
12、示例性的,所述第一区域的区块面积为所述第二区域的区块面积的2倍。
13、示例性的,所述基于用户输入的指令,对所述第一模式和所述第二模式进行模式切换,包括:
14、预先设置第三模式;
15、基于用户输入的指令,对所述第一模式、所述第二模式和所述第三模式进行切换;
16、其中,所述第三模式根据第三区域位置信息打开相应的spad;根据第三像素构成数量,将每个像素的数据通过tdc阵列输出;所述第三区域信息包括spad阵列第三区域的区块尺寸和spad位置;所述第二区域面积大于所述第三区域面积,所述第二像素构成数量大于第三像素构成数量。
17、本申请另一方面提供了一种dtof测距系统,包括spad阵列、tdc阵列、寄存器、i2c接口和控制器;
18、所述i2c接口分别与所述寄存器和所述控制器相连,所述控制器分别与所述spad阵列、所述tdc阵列相连;
19、所述寄存器用于存储配置信息,所述配置信息包括单个像素所包含的spad的构成数量;
20、所述控制器用于执行存储器中存储的计算机程序时实现如前任一项所述dtof测距方法的步骤。
21、示例性的,还包括面阵发射端和光信号驱动器;所述光信号驱动器与所述面阵发射端相连;
22、所述面阵发射端用于输出面阵光信号;其包括垂直腔面发射激光器和扩散元件;所述垂直腔面发射激光器包括至少两个激光信号输出通道;所述扩散元件用于对所述垂直腔面发射激光器输出的光信号进行扩散处理,以使激光呈现均匀分布;
23、所述光信号驱动器通过所述i2c接口进行逐帧调整功耗,以与角分辨率的逐帧调节相匹配。
24、本申请提供的技术方案的优点在于,通过设置不同的模式实现感光像素数量和感光像素位置可调整,用户可以根据实际需求通过下发指令选择与所需角分辨率相匹配的模式,通过指令的切换能够实现角分辨率的高效地动态改变,整个实现过程中不需要增大感光面积,可以实现低成本且高效地动态改变角分辨率。
25、此外,本申请还针对dtof测距方法提供了相应的实现dtof测距系统,进一步使得所述方法更具有实用性,所述dtof测距系统具有相应的优点。
26、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本申请。
技术特征:
1.一种dtof测距方法,其特征在于,包括:
2.根据权利要求1所述的dtof测距方法,其特征在于,所述第一区域和所述第二区域包括相同或完全不同的spad。
3.根据权利要求1所述的dtof测距方法,其特征在于,所述第一像素构成数量为所述第一模式下的每个像素包含的spad数量;所述第二像素构成数量为所述第二模式下的每个像素包含的spad数量;所述第一像素构成数量和所述第二像素构成数量不相等。
4.根据权利要求1所述的dtof测距方法,其特征在于,所述基于用户输入的指令之前,还包括:
5.根据权利要求1所述的dtof测距方法,其特征在于,所述第一区域的区块面积大于第二区域的区块面积,所述第一区域对应开启的像素数量与所述第二区域对应开启的像素数量相等。
6.根据权利要求1所述的dtof测距方法,其特征在于,所述第一区域的区块面积为所述第二区域的区块面积的2倍。
7.根据权利要求1至6任意一项所述的dtof测距方法,其特征在于,所述基于用户输入的指令,对所述第一模式和所述第二模式进行模式切换,包括:
8.一种dtof测距系统,其特征在于,包括spad阵列、tdc阵列、寄存器、i2c接口和控制器;
9.根据权利要求8所述的dtof测距系统,其特征在于,还包括面阵发射端和光信号驱动器;所述光信号驱动器与所述面阵发射端相连;
技术总结
本申请公开了一种dTOF测距方法及系统,应用于光学测量技术领域。其中,方法包括预先设置第一模式和第二模式;其中,第一模式根据第一区域位置信息打开相应的SPAD,根据第一像素构成数量,将每个像素的数据通过TDC阵列输出;第二模式根据第二区域位置信息打开相应的SPAD,根据第二像素构成数量,将每个像素的数据通过TDC阵列输出,各区域位置信息包括SPAD阵列相应区域的区块尺寸和SPAD位置。基于用户输入的指令,对第一模式和第二模式进行模式切换;根据每个像素的TDC数据生成对应的直方图,以得到各像素的深度值。本申请可以解决相关技术角分辨率不足的问题,实现低成本且高效地动态改变角分辨率。
技术研发人员:王乐天,张超
受保护的技术使用者:深圳市灵明光子科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!