一种基于运动学传感器测量分组的无信标定位方法与流程
本申请涉及定位领域,具体而言,特别涉及一种基于运动学传感器测量分组的无信标定位方法。
背景技术:
1、信标通常为用于定位的基础设施,比如定位基站、信号标签、gps卫星等,可用于测量、计算装有定位标签、定位终端的物体。终端为可安装于被定位的物体上的、能被信标定位的装置。
2、在现有技术中,对物体在应用场景下的定位通常是布设多个信标,根据彼此之间的距离、角度等来对物体进行精确定位。但在现实中,信标的遍在性无法保障,会导致定位服务中断或不可用。例如在建筑物内、山区、密林、地下等环境,常规的卫星通常会失效。许多应用场景往往来不及、不方便布设外部定位信标。因而,定位标签从有信标环境进入无信标环境,会导致定位精度较差或定位中断。且现有的运动学传感器时连续运动累积误差大,单一的定位方式不能满足无信标情况下的定位要求。
技术实现思路
1、基于现有技术的不足,针对现有定位误差大的问题,本申请提供了一种基于运动学传感器测量分组的无信标定位方法,其特征在于,包括以下步骤:
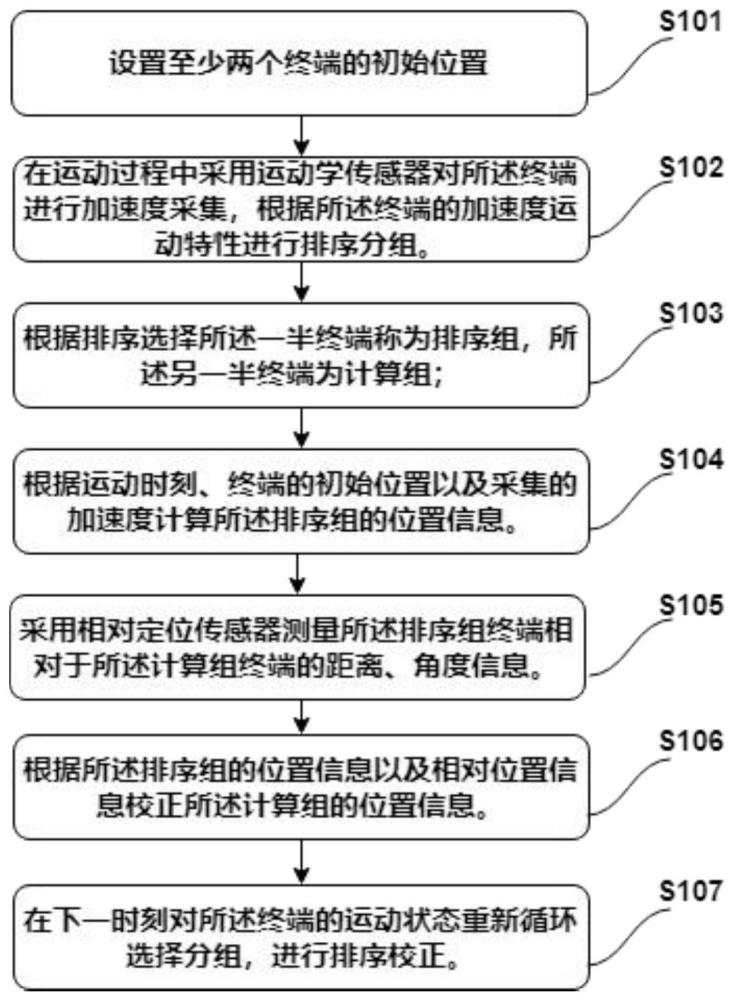
2、s1:设置至少两个终端的初始位置;
3、s2:在运动过程中采用运动学传感器对所述终端进行加速度采集,根据所述终端的加速度运动特性进行排序分组。
4、s3:根据排序选择所述一半终端称为排序组,所述另一半终端为计算组;
5、s4:根据运动时刻、终端的初始位置以及采集的加速度计算所述排序组的位置信息。
6、s5:采用相对定位传感器测量所述排序组终端相对于所述计算组终端的距离、角度信息。
7、s6:根据所述排序组的位置信息以及相对位置信息校正所述计算组的位置信息。
8、s7:在下一时刻对所述终端的运动特性重新循环选择分组,进行排序校正。
9、可选地,在所述步骤s2中,所述排序组的终端一对一测量所述计算组的终端位置信息。
10、可选地,在所述步骤s2中,所述分组方法包括:对所述终端的加速度大小进行排序,选择加速度大的一半终端为排序组,其余终端为计算组。
11、可选地,在所述步骤s2中,所述分组方法包括:预先设置所述终端加速度阈值上限和下限,选择在所述阈值范围的一半终端为排序组,其余终端为计算组。
12、可选地,在所述步骤s2中,所述分组方法包括:在所述采集终端的加速度中随机选择一半终端为排序组,其余终端为计算组。
13、本申请的有益效果是:预先设置所有终端的初始位置,通过运动学传感器测量所有终端的运动加速度,根据实际情况对所有终端进行分组,选择一半终端称为排序组,另一半终端为计算组;计算出排序组终端的位置信息,再通过相对定位传感器测量出计算组终端相对于排序组终端的相对距离、角度信息,对计算组终端位置信息进行定位修正。在运动过程中实时根据运动特性循环分组进行校正,可以有效提高定位精度,减少定位过程中产生的误差。
技术特征:
1.一种基于运动学传感器测量分组的无信标定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于运动学传感器测量分组的无信标定位方法,其特征在于,在所述步骤s4中,所述排序组的终端一对一测量所述计算组的终端位置信息。
3.根据权利要求1所述的一种基于运动学传感器测量分组的无信标定位方法,其特征在于,在所述步骤s2中,所述分组方法包括:对所述终端的加速度大小进行排序,选择加速度大的一半终端为排序组,其余终端为计算组。
4.根据权利要求1所述的一种基于运动学传感器测量分组的无信标定位方法,其特征在于,在所述步骤s2中,所述分组方法包括:预先设置所述终端加速度阈值上限和下限,选择在所述阈值范围的一半终端为排序组,其余终端为计算组。
5.根据权利要求1所述的一种基于运动学传感器测量分组的无信标定位方法,其特征在于,在所述步骤s2中,所述分组方法包括:在所述采集终端的加速度中随机选择一半终端为排序组,其余终端为计算组。
技术总结
本申请公开了一种基于运动学传感器测量分组的无信标定位方法,属于定位领域,主要包括以下步骤:首先设置所有终端的初始位置,在终端运动过程中根据运动学传感器采集所有终端的加速度,并根据运动特性选择终端分组,根据排序选择所述一半终端称为排序组,所述另一半终端为计算组。计算排序组终端的位置信息,根据相对定位传感器测量计算组终端与排序组终端之间的相对距离、角度信息,并对排序组终端的位置信息进行校正,在下一时刻对所有终端进行循环排序,进行下一时刻的校正。根据上述方法可以提高定位的精度,通过校正过程减少定位过程中的误差。
技术研发人员:李文奇,陆晓峰,罗建
受保护的技术使用者:西安秦玄汉信息科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!