验证扭矩测量精度系统及扭矩测量系统臂长的测量方法与流程
本发明涉及扭矩测量,具体提供一种验证扭矩测量精度系统及扭矩测量系统臂长的测量方法。
背景技术:
1、扭矩标准机是以砝码的重力作为标准力值,直接或经过一定的杠杆机构放大后,通过力臂杠杆的作用产生标准力矩。杠杆力臂长度的准确度直接影响了扭矩标准机检测准确度。目前,扭矩标准机的杠杆力臂长度数据一般是在出厂组装前,通过三坐标测量仪进行臂长测定,这样测出的臂长由于刀口r值大小是模拟计算出的,且不一定是实际受力点,直接导致了臂长的实际测量不准确。由于缺少方便可行的检定手段,在后期对扭矩标准机的定期检定中,一般不再对杠杆臂长数值进行检定,如在国家标准jjg769-2009《扭矩标准机检定规程》中,标准扭矩机检定项目表中只对外观、扭矩轴头同轴度、杠杆初始水平度、灵敏限、扭矩值重复性和扭矩值误差进行检定。但是扭矩标准机的安装状态和后期使用保养状态,都会影响杠杆臂长数值的准确度,故亟需一种方便对扭矩测量系统中杠杆力臂长度进行测定的方案,尤其在基准级的扭矩标准机中。
技术实现思路
1、为了克服上述现有技术的不足,本发明提供一种验证扭矩测量精度系统及扭矩测量系统臂长的测量方法。。
2、为达到上述目的,本发明解决其技术问题所采用的技术方案是:一种验证扭矩测量精度系统,包括杠杆和分别位于所述杠杆左右两端的悬吊机构,所述悬吊机构用于挂持加载砝码,所述悬吊机构在杠杆端部的安装位置可以在沿杠杆臂长方向上进行调节和锁定,且所述悬吊机构在杠杆臂长方向上的移动距离可以被测量。
3、采用本发明技术方案,借助于可移位式的砝码悬吊机构,只需要在待测端不同位置分别加载砝码至平衡状态,即可通过公式直接计算得出杠杆的实际力臂长度,实现对标称力臂长度准确度的快速检定。相比采用三坐标测量仪的传统检测方式而言,本发明无需将杠杆整体进行拆装,测量出的臂长精度更高,大大节约了劳力,提高了检定效率,节约检定成本。采用本发明测量方式,基于高精度扭矩测量的基本原理,整机保持在原态,杠杆臂长检定结果更为准确,提升了扭矩测量系统对扭矩测量的准确性。
4、进一步地,所述悬吊机构包括下座体、上座体和砝码挂架,所述下座体安装在所述杠杆的端部,所述下座体在所述杠杆端部的安装位置可以在沿杠杆臂长方向上进行调节和锁定;所述上座体设置于所述下座体上方,所述上座体与所述下座体之间为线性接触,所述上座体与所述下座体的线接触方向与杠杆臂长方向垂直;所述砝码挂架的顶端连接于所述上座体。
5、采用上述优选的方案,悬吊机构方便砝码的挂持加载,上座体和下座体之间采用线性接触,确保杠杆力臂位置稳定准确。
6、进一步地,在所述杠杆和所述下座体之间设置有导向结构,所述导向结构用于对所述下座体在杠杆端部沿杠杆臂长方向上移动提供导向。
7、进一步地,所述导向结构包括设置在所述下座体前后两侧的长导向槽孔和通过螺纹连接于所述杠杆上的导向螺杆,所述长导向槽孔的长度方向与杠杆臂长方向平行,所述导向螺杆的外径与所述长导向槽孔的宽度相匹配。
8、采用上述优选的方案,确保悬吊机构移位时能稳定顺着杠杆臂长方向,确保对杠杆臂长变化测定的准确性。
9、进一步地,还包括锁位机构,所述锁位机构用于在所述下座体位置移动之后,将所述下座体与所述杠杆锁紧固定。
10、进一步地,在所述杠杆的端部设有用于安装所述下座体的移位平台面,所述移位平台面的两端分别具有与移位平台面垂直的第一壁面和第二壁面;所述下座体的一侧具有第一斜侧面,所述下座体的另一侧具有第一直侧面;所述锁位机构包括斜楔块和顶紧螺钉,所述斜楔块的一侧具有第二直侧面,所述斜楔块的另一侧具有第二斜侧面,所述第二直侧面与所述第一壁面相贴靠,所述斜楔块的第二斜侧面与所述下座体的第一斜侧面相贴靠匹配;所述第二壁面所在的壁体上设有水平设置的螺纹孔,所述顶紧螺钉连接于该螺纹孔,所述顶紧螺钉头端顶靠于所述下座体的第一直侧面。
11、采用上述优选的方案,能够将悬吊机构在移位后重新锁定在杠杆的特定位置,确保检定过程杠杆系统保持稳定。
12、进一步地,还包括位移测量机构,所述位移测量机构用于测量下座体在杠杆端部的移动距离。
13、进一步地,所述位移测量机构为螺旋测微器,螺旋测微器的螺母套筒水平固定安装在所述杠杆端部第二壁面所在的壁体上;测距时,螺旋测微器的测微螺杆顶端与所述下座体的第一直侧面接触。
14、采用上述优选的方案,能够精准对悬吊机构移位距离的精准测定。
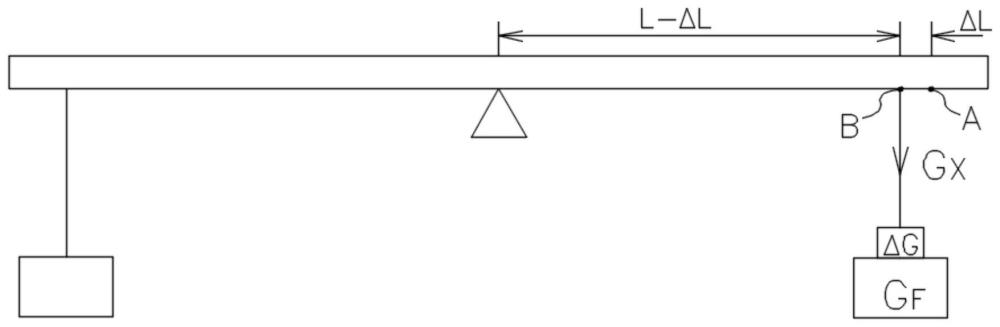
15、扭矩测量系统力臂长度的测量方法,已知杠杆待测一端的悬吊机构的重力值gx,包括以下步骤:
16、步骤1,先将杠杆待测一端的悬吊机构保持在与标称力臂臂长相对应的初始位,往待测端悬吊机构上加载重力值为gf的砝码,再往另一端悬吊机构上加载砝码,使得杠杆平衡;
17、步骤2,将待测端的悬吊机构沿杠杆臂长方向往里移动δl距离后锁紧,并往待测端悬吊机构上再加载砝码,至杠杆再次平衡,记录增加的砝码重力值为δg;
18、步骤3,计算得到待测端的实测力臂臂长l=(gx+gf+δg)*δl/δg。
19、通过上述测量方法,能方便快速地测量出杠杆实际力臂长度,通过杠杆实际力臂长度数值与标称力臂长度进行比较,即可得出杠杆标称力臂长度的准确度。采用本发明测量方式,扭矩测量系统整机无需拆装,基于高精度扭矩测量的基本原理,整机保持在原态,检定结果更为准确,提升了扭矩测量系统对扭矩测量的准确性。
技术特征:
1.验证扭矩测量精度系统,包括杠杆和分别位于所述杠杆左右两端的悬吊机构,所述悬吊机构用于挂持加载砝码,其特征在于,所述悬吊机构在杠杆端部的安装位置可以在沿杠杆臂长方向上进行调节和锁定,且所述悬吊机构在杠杆臂长方向上的移动距离可以被测量。
2.根据权利要求1所述的验证扭矩测量精度系统,其特征在于,所述悬吊机构包括下座体、上座体和砝码挂架,所述下座体安装在所述杠杆的端部,所述下座体在所述杠杆端部的安装位置可以在沿杠杆臂长方向上进行调节和锁定;所述上座体设置于所述下座体上方,所述上座体与所述下座体之间为线性接触,所述上座体与所述下座体的线接触方向与杠杆臂长方向垂直;所述砝码挂架的顶端连接于所述上座体。
3.根据权利要求2所述的验证扭矩测量精度系统,其特征在于,在所述杠杆和所述下座体之间设置有导向结构,所述导向结构用于对所述下座体在杠杆端部沿杠杆臂长方向上移动提供导向。
4.根据权利要求3所述的验证扭矩测量精度系统,其特征在于,所述导向结构包括设置在所述下座体前后两侧的长导向槽孔和通过螺纹连接于所述杠杆上的导向螺杆,所述长导向槽孔的长度方向与杠杆臂长方向平行,所述导向螺杆的外径与所述长导向槽孔的宽度相匹配。
5.根据权利要求2所述的验证扭矩测量精度系统,其特征在于,还包括锁位机构,所述锁位机构用于在所述下座体位置移动之后,将所述下座体与所述杠杆锁紧固定。
6.根据权利要求5所述的验证扭矩测量精度系统,其特征在于,在所述杠杆的端部设有用于安装所述下座体的移位平台面,所述移位平台面的两端分别具有与移位平台面垂直的第一壁面和第二壁面;所述下座体的一侧具有第一斜侧面,所述下座体的另一侧具有第一直侧面;所述锁位机构包括斜楔块和顶紧螺钉,所述斜楔块的一侧具有第二直侧面,所述斜楔块的另一侧具有第二斜侧面,所述第二直侧面与所述第一壁面相贴靠,所述斜楔块的第二斜侧面与所述下座体的第一斜侧面相贴靠匹配;所述第二壁面所在的壁体上设有水平设置的螺纹孔,所述顶紧螺钉连接于该螺纹孔,所述顶紧螺钉头端顶靠于所述下座体的第一直侧面。
7.根据权利要求6所述的验证扭矩测量精度系统,其特征在于,还包括位移测量机构,所述位移测量机构用于测量下座体在杠杆端部的移动距离。
8.根据权利要求7所述的验证扭矩测量精度系统,其特征在于,所述位移测量机构为螺旋测微器,螺旋测微器的螺母套筒水平固定安装在所述杠杆端部第二壁面所在的壁体上;测距时,螺旋测微器的测微螺杆顶端与所述下座体的第一直侧面接触。
9.扭矩测量系统臂长的测量方法,基于权利要求1-8任一所述的验证扭矩测量精度系统,已知杠杆待测一端的悬吊机构的重力值gx,其特征在于,包括以下步骤:
技术总结
本发明提供验证扭矩测量精度系统及扭矩测量系统臂长的测量方法。验证扭矩测量精度系统包括杠杆和可移位式的砝码悬吊机构,且悬吊机构在杠杆臂长方向上的移动距离可以被测量。采用本发明技术方案,只需要在待测端不同位置分别加载砝码至平衡状态,即可通过公式直接计算得出杠杆的实际力臂长度,实现对标称力臂实际有效长度准确度的快速检定。相比采用三坐标测量仪测量臂长的传统检测方式而言,本发明无需将杠杆整体进行拆装,测量出的臂长精度更高,大大节约了劳力,提高了检定效率,节约检定成本。本发明测量方法基于高精度扭矩测量的基本原理,整机保持在原态,杠杆力臂实际有效臂长检定结果更为准确。
技术研发人员:陶泽成,陶超凡,蒋磊
受保护的技术使用者:昆山市创新科技检测仪器有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!