惯性测量单元误差校正方法、装置、电子设备及存储介质与流程
本发明涉及传感器,尤其涉及一种惯性测量单元误差校正方法、装置、电子设备及存储介质。
背景技术:
1、惯性测量单元(inertial measurement unit,imu)作为重要的传感器之一,对于感知和定位算法的性能至关重要。因此,对imu进行动态误差估计能够便于对imu误差进行校正,提高imu的测量精度。
2、在相关技术中,常用的imu动态误差估计方法有静态标定法、动态标定法、模拟动态法、专用测试平台法以及在线标定法。其中,静态标定法主要用于评估imu在静态状态下的误差;动态标定法主要用于评估imu在动态环境下的误差表现;模拟动态法主要用于在控制条件下评估imu的性能;专用测试平台法主要用于通过imu动态误差评估的测试平台对imu的误差性能进行全面评估,这些平台通常包括精确的运动控制系统和外部测量设备,可以模拟多种动态场景;在线标定法主要用于在imu使用过程中实时对其误差进行估计和校正。
3、然而,相关技术中提供的这些方法都存在一定的局限性和不足:
4、静态标定法:静态标定法只能评估imu在静止状态下的误差特性,无法考虑imu在动态环境下的性能表现;动态标定法:动态标定法通过模拟运动来评估imu的动态误差,但受限于外部测量设备的精度和复杂的数据融合算法,其评估结果可能存在一定的误差;模拟动态法:模拟动态法可以在受控环境中模拟动态场景,但实验室环境与真实场景存在差异,该方法的评估结果不够准确,无法全面覆盖复杂的真实动态场景;专用测试平台法:虽然专用测试平台法能够提供高精度的参考结果,但由于该方法需要专门的设备和资源,成本较高,使用流程复杂,不适用于大规模应用;在线标定法:虽然在线标定法能够在设备运行时实时估计imu的误差,并与定位算法进行联合优化,但该方法需要在实时运行时对imu进行标定,导致增加算法的复杂度以及系统计算的负担和延迟。
5、因此,如何在多种动态场景下,快速简单地对惯性测量单元进行误差校正,是当前亟需解决的技术问题。
技术实现思路
1、本发明实施例的目的是提供一种惯性测量单元误差校正方法、装置、电子设备及存储介质,以解决无法在多种动态场景下,快速便捷地对惯性测量单元进行误差校正的技术问题。
2、第一方面,本发明实施例提供了一种惯性测量单元误差校正方法,包括:
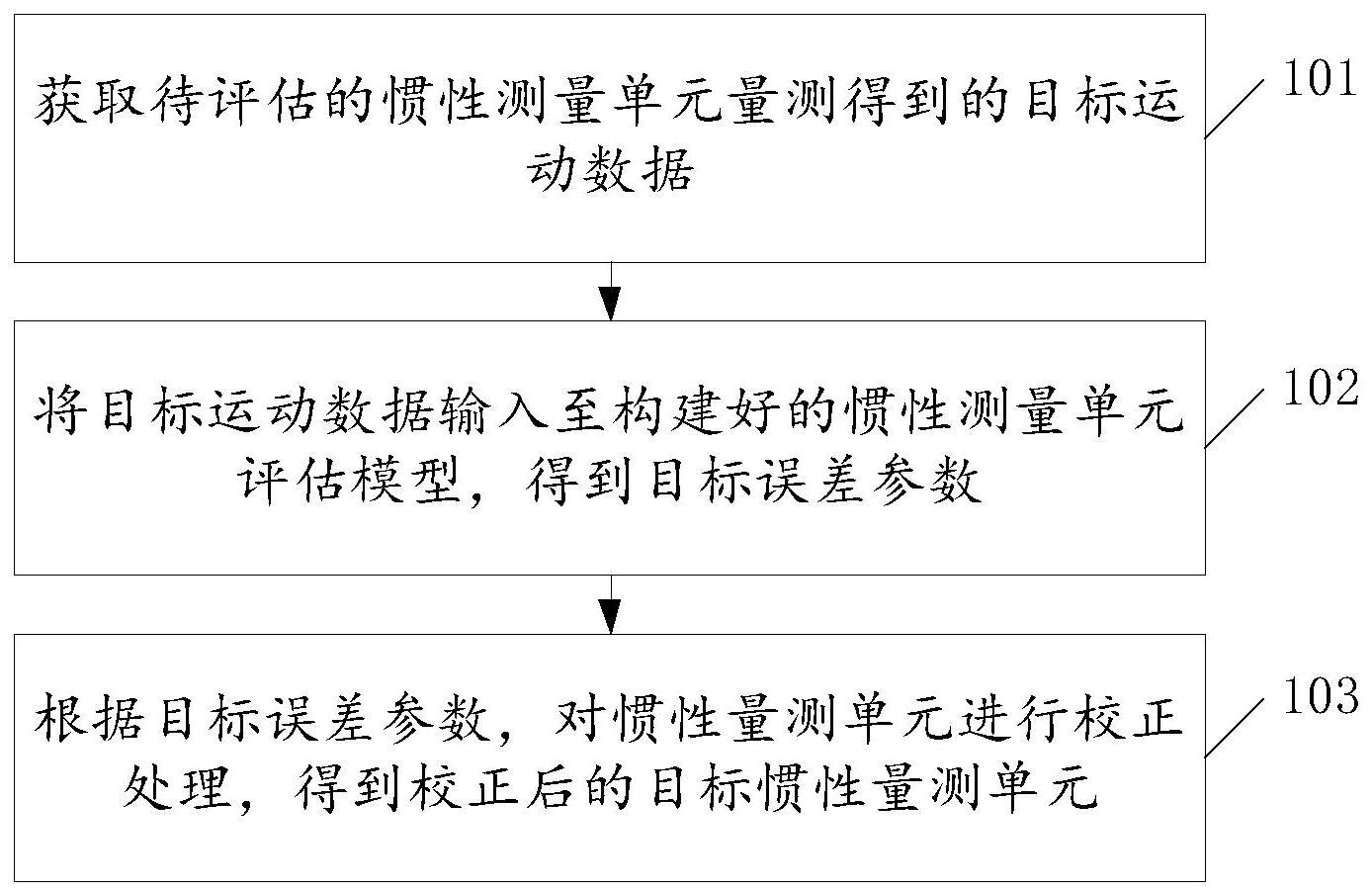
3、获取待评估的惯性测量单元量测得到的目标运动数据;
4、将所述目标运动数据输入至构建好的惯性测量单元评估模型,得到目标误差参数,所述惯性量测单元评估模型用于根据运动数据确定所述惯性量测单元对应的运动状态,并输出不同运动状态下对应的误差参数;
5、根据所述目标误差参数,对所述惯性量测单元进行校正处理,得到校正后的目标惯性量测单元。
6、第二方面,本发明实施例提供了一种惯性测量单元误差校正装置,包括:
7、第一获取模块,用于获取待评估的惯性测量单元量测得到的目标运动数据;
8、第一评估模块,用于将所述目标运动数据输入至构建好的惯性测量单元评估模型,得到目标误差参数,所述惯性量测单元评估模型用于根据运动数据确定所述惯性量测单元对应的运动状态,并输出不同运动状态下对应的误差参数;
9、校正模块,用于根据所述目标误差参数,对所述惯性量测单元进行校正处理,得到校正后的目标惯性量测单元。
10、第三方面,本发明实施例提供了一种电子设备,电子设备包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任一项所述的惯性测量单元误差校正方法中的步骤。
11、第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述的惯性测量单元误差校正方法中的步骤。
12、本发明实施例提供了一种惯性测量单元误差校正方法、装置、电子设备及存储介质,该方法通过将待评估的惯性量测单元量测得到的目标运动数据,输入至构建好的惯性量测单元评估模型,以供惯性量测单元评估模型根据目标运动数据确定其运动状态,并输出该运动状态下对应的目标误差参数,从而能够根据目标误差参数对惯性量测单元进行校正处理,得到校正后的目标惯性量测单元,提高误差校正后的惯性量测单元的测量精度。
技术特征:
1.一种惯性测量单元误差校正方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,在所述将所述目标运动数据输入至构建好的惯性测量单元评估模型,得到目标误差参数的步骤之前,所述方法还包括:
3.如权利要求2所述的方法,其特征在于,所述初始运动数据包括所述惯性量测单元的第一运动数据,以及所述运动设备的第二运动数据;
4.如权利要求3所述的方法,其特征在于,所述对所述第一运动数据和所述第二运动数据进行对齐处理,得到对齐处理后的第三运动数据,包括:
5.如权利要求3所述的方法,其特征在于,所述根据所述初始运动数据和所述标准误差参数,构建惯性量测单元评估模型,包括:
6.如权利要求2所述的方法,其特征在于,在所述将所述惯性量测单元在不同运动状态下对应的误差参数作为状态量,并根据所述估计结果对所述惯性量测单元进行误差评估处理,得到所述惯性量测单元在不同运动状态下对应的标准误差参数的步骤之前,所述方法还包括:
7.如权利要求1所述的方法,其特征在于,所述根据所述目标误差参数,对所述惯性量测单元进行校正处理,得到校正后的目标惯性量测单元,包括:
8.一种惯性测量单元误差校正装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的方法中的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的方法中的步骤。
技术总结
本发明公开了一种惯性测量单元误差校正方法、装置、电子设备及存储介质,该方法包括获取待评估的惯性测量单元量测得到的目标运动数据,将目标运动数据输入至构建好的惯性测量单元评估模型,得到目标误差参数,惯性量测单元评估模型用于根据运动数据确定惯性量测单元对应的运动状态,并输出不同运动状态下对应的误差参数,根据目标误差参数,对惯性量测单元进行校正处理,得到校正后的目标惯性量测单元。采用本发明实施例,能够在不同的动态运动场景下对惯性量测单元进行快速且精准的误差校正,从而提高误差校正后的惯性量测单元的测量精度。
技术研发人员:胡鑫
受保护的技术使用者:OPPO广东移动通信有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!