一种雾霾影响区域的GNSS实时定位解算方法与流程
本发明涉及一种雾霾影响区域的gnss实时定位解算方法,属于导航定位。
背景技术:
1、全球导航卫星系统(global navigation satellite system,gnss)监测技术以无可比拟的高精度、实时、低成本和安全性等优势在工程与地质灾害监测中广泛应用。但现有的变形监测技术受到大气效应、多路径效应、监测设备性能和模型算法等条件的限制,导致在高山峡谷及复杂气象条件下监测精度控制困难问题突出。尤其对于临灾地质灾害体,低效率的预警可能会带来重大的安全隐患。为此,科研人员多年来一直致力于改进误差抑制技术,但长期以来针对误差抑制研究主要集中在电离层、对流层延迟和多路径效应等方面,对于国内季节性广泛分布的雾霾天气对精度的影像研究尚为空白。
2、随着状态域校正格式的实时数据流的播发,快速促进了实时定位的发展,而区域高精度实时定位解算是亟待解决的问题。定位解算结果的偏差是影响高精度定位的主要因素之一,也是gnss气象学重要研究对象。气溶胶光学厚度(aerosol optical depth,aod)是气溶胶总含量的基本参数,2.5微米的细颗粒物(particulate matter 2.5,pm2.5)是表示空气质量的基本参数,均是研究大气的重要参数。在传统的定位数据处理过程中,并未考虑雾霾天气不同污染条件下aod与pm2.5对gnss定位结果的影响,而定位结果偏差的不准确将会影响定位的精度和收敛速度,使得定位的精度较低,且定位解算的收敛速度较慢。
技术实现思路
1、本发明提供了一种雾霾影响区域的gnss实时定位解算方法,能够解决现有gnss在雾霾影响区域的定位精度较低,且定位解算的收敛速度较慢的问题。
2、本发明提供了一种雾霾影响区域的gnss实时定位解算方法,所述方法包括:
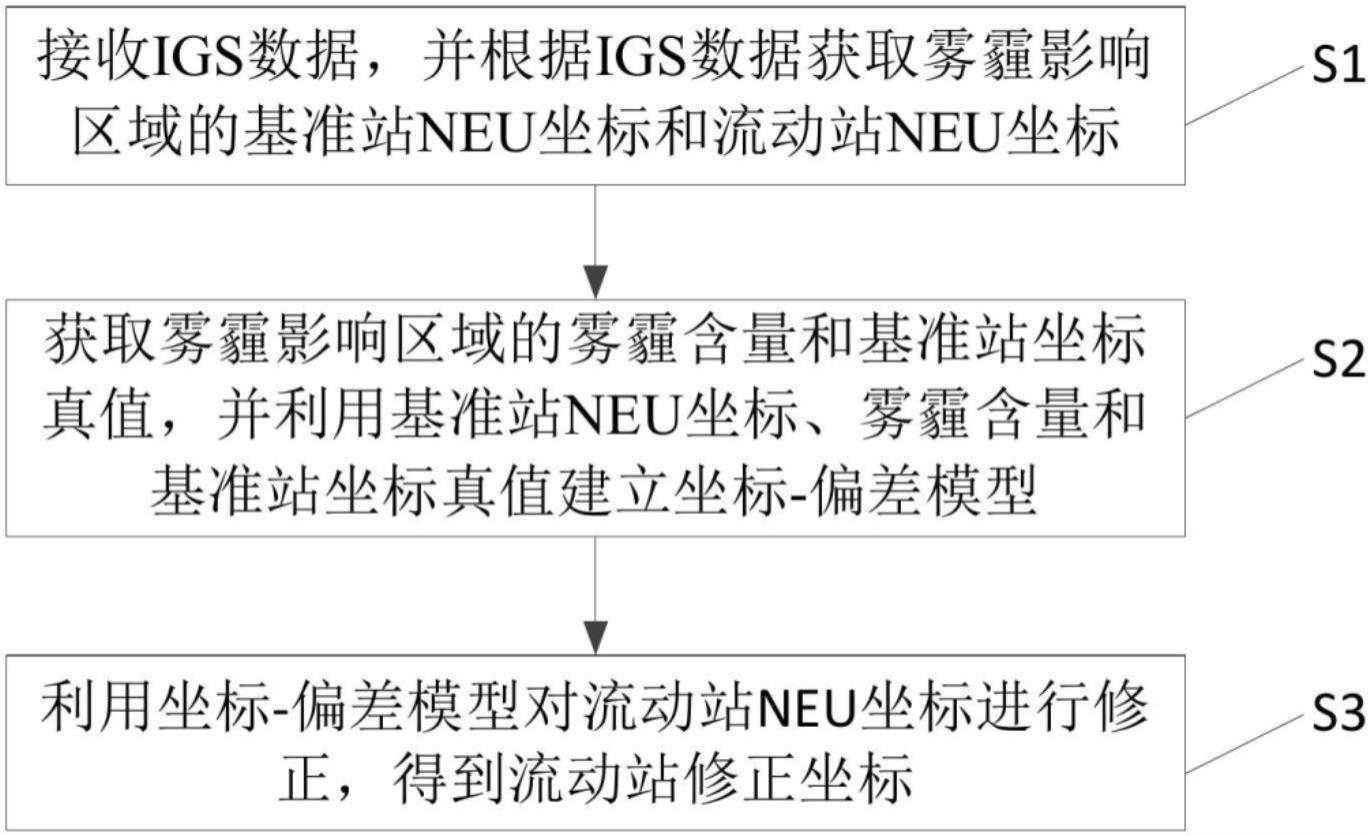
3、s1、接收igs数据,并根据所述igs数据获取雾霾影响区域的基准站neu坐标和流动站neu坐标;
4、s2、获取所述雾霾影响区域的雾霾含量和基准站坐标真值,并利用所述基准站neu坐标、所述雾霾含量和所述基准站坐标真值建立坐标-偏差模型;
5、s3、利用所述坐标-偏差模型对所述流动站neu坐标进行修正,得到流动站修正坐标。
6、可选的,所述s2具体包括:
7、s21、获取所述雾霾影响区域的基准站坐标真值,并计算所述基准站neu坐标与所述基准站坐标真值之间的坐标偏差;
8、s22、获取所述雾霾影响区域的雾霾含量,并利用所述基准站neu坐标、所述雾霾含量和所述坐标偏差建立坐标-偏差模型。
9、可选的,所述坐标偏差为所述基准站neu坐标与所述基准站坐标真值之间的差值。
10、可选的,所述雾霾含量为aod含量和pm2.5含量。
11、可选的,所述s3具体包括:
12、s31、将所述流动站neu坐标代入所述坐标-偏差模型中,得到流动站偏差;
13、s32、计算所述流动站neu坐标与所述流动站偏差的和值,并将所述和值作为流动站修正坐标。
14、可选的,在所述s3之后,所述方法还包括:
15、s4、对所述流动站修正坐标进行精度评估,得到定位解算的评估结果。
16、可选的,所述s4具体包括:
17、s41、获取所述雾霾影响区域的流动站坐标真值;
18、s42、计算所述流动站修正坐标与所述流动站坐标真值之间的均方根,将所述均方根作为定位解算的评估结果。
19、可选的,所述s1具体包括:
20、s11、获取igs数据,并根据所述igs数据获取雾霾影响区域的基准站xyz坐标和流动站xyz坐标;
21、s12、对所述基准站xyz坐标和所述流动站xyz坐标分别进行neu坐标系转换,得到基准站neu坐标和流动站neu坐标。
22、可选的,所述s11具体为:
23、获取igs数据,并基于所述igs数据,利用卡尔曼滤波方法对定位模型进行解算,得到雾霾影响区域的基准站xyz坐标和流动站xyz坐标。
24、可选的,所述定位模型为ppp函数模型。
25、本发明能产生的有益效果包括:
26、本发明提供的雾霾影响区域的gnss实时定位解算方法,利用接收的实时igs数据对基准站的坐标进行解算;然后估计基准站坐标在n、e、u三个方向上的位置偏差(即坐标偏差),并建立其与基准站neu坐标、雾霾含量(即aod含量和pm2.5含量)之间的关系式;最后解算流动站的坐标位置,并将通过该关系式得到的流动站坐标偏差修正到流动站的neu坐标上;本发明考虑了不同污染水平对gnss解算精度的影响,最后将其直接应用到定位的偏差估计中,对于改善定位精度和收敛速度具有重要意义。
技术特征:
1.一种雾霾影响区域的gnss实时定位解算方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述s2具体包括:
3.根据权利要求2所述的方法,其特征在于,所述坐标偏差为所述基准站neu坐标与所述基准站坐标真值之间的差值。
4.根据权利要求1或2所述的方法,其特征在于,所述雾霾含量为aod含量和pm2.5含量。
5.根据权利要求1所述的方法,其特征在于,所述s3具体包括:
6.根据权利要求1所述的方法,其特征在于,在所述s3之后,所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,所述s4具体包括:
8.根据权利要求1所述的方法,其特征在于,所述s1具体包括:
9.根据权利要求8所述的方法,其特征在于,所述s11具体为:
10.根据权利要求9所述的方法,其特征在于,所述定位模型为ppp函数模型。
技术总结
本发明公开了一种雾霾影响区域的GNSS实时定位解算方法,属于导航定位技术领域,能够解决现有GNSS在雾霾影响区域的定位精度较低,且定位解算的收敛速度较慢的问题。所述方法包括:S1、接收IGS数据,并根据IGS数据获取雾霾影响区域的基准站NEU坐标和流动站NEU坐标;S2、获取雾霾影响区域的雾霾含量和基准站坐标真值,并利用基准站NEU坐标、雾霾含量和基准站坐标真值建立坐标‑偏差模型;S3、利用坐标‑偏差模型对流动站NEU坐标进行修正,得到流动站修正坐标。本发明用于雾霾影响区域的GNSS实时定位。
技术研发人员:李祖锋,赵庆志,周恒,周兴波,尚海兴,赵文君,柯生学,邢文,张钊,缪志选,陈展昭
受保护的技术使用者:中国电建集团西北勘测设计研究院有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!