一种基于激光跟踪仪结合机械臂在位测量光学元件面形的方法
本发明属于检测领域,具体涉及一种基于激光跟踪仪结合机械臂在位测量光学元件面形的方法。
背景技术:
1、大口径光学元件在各阶段都会有对应的检测手段,大口径光学元件在细磨阶段,镜面面形精度及表面粗糙稍差,因此该加工阶段主要为接触测量的方式进行控制。传统测量设备主要为红外干涉仪、摆臂轮廓仪、三坐标测量机;为提高大口径光学元件研制效率,降低镜面接触测量划伤风险,国内有研究和应用激光跟踪仪在位非接触测量大口径光学元件面形的相关技术。
2、采用激光跟踪仪在位非接触检测大口径光学元件面形方式为:将激光跟踪仪置于待测面顶点曲率半径位置处,操作人员利用牵引杆将合作靶标球形角锥镜与待测面接触,通过对气浮靶标输入气压,移动球形角锥镜扫描测量光学元件表面获取整个表面的轮廓坐标信息,再对所获取测量点坐标进行半径补偿,计算分析获得面形误差。该方法接触力较小,在提高检测效率的同时解决了靶球接触划伤镜面的风险。
3、但是上述方法在大口径面形的在位测量中,需要人员进行靶标牵引,因此牵引路径与施加力不可控,测量路径重复性差,影响镜面面形局部高低频分析;为此基于激光跟踪仪测量法需要一种在位的靶标牵引方式。
技术实现思路
1、本发明为解决上述不足,提供了一种基于激光跟踪仪结合机械臂在位测量光学元件面形的一种方法。
2、本发明采用的技术方案为:一种基于激光跟踪仪结合机械臂在位测量光学元件面形方法,按以下步骤实现:
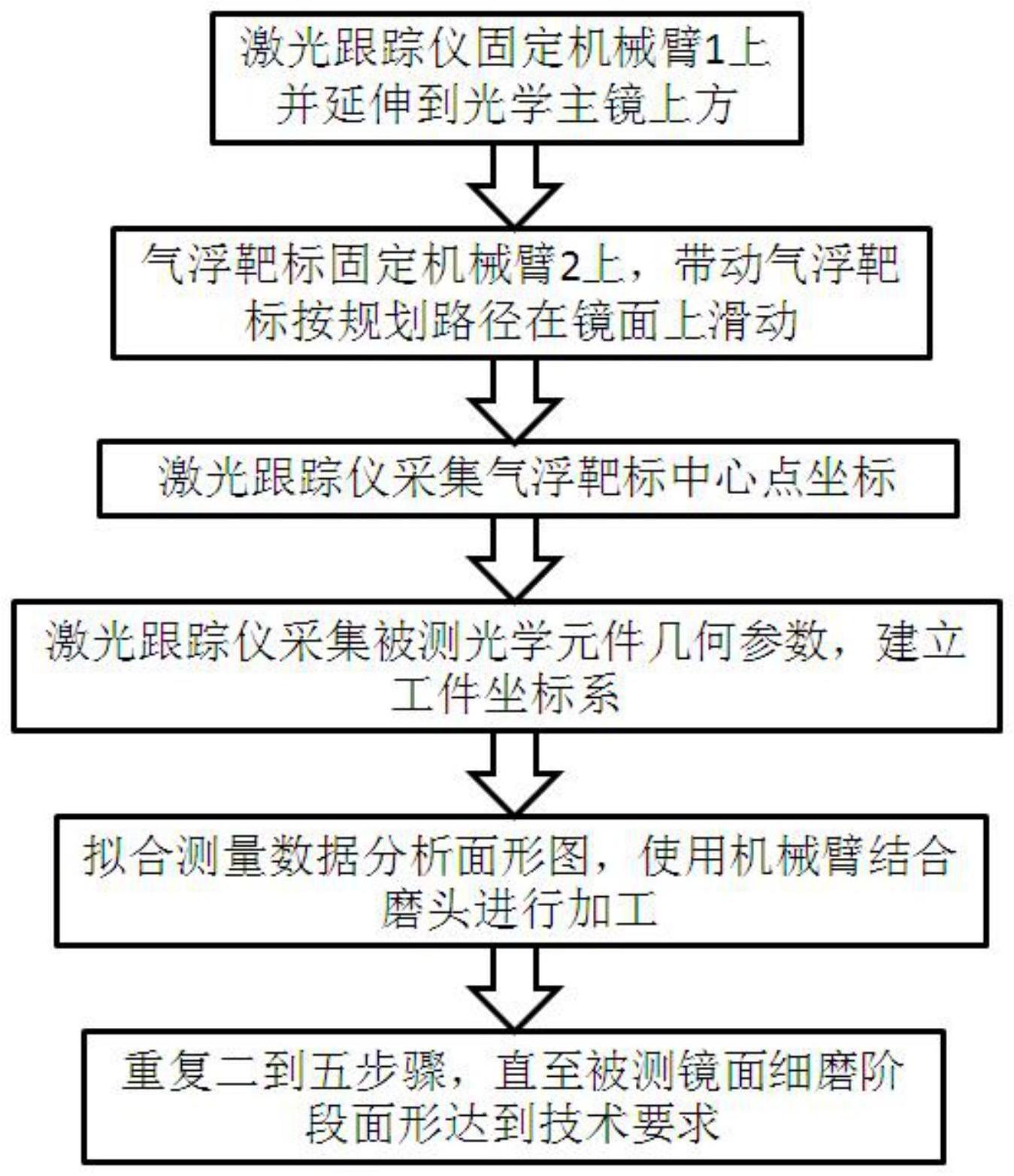
3、步骤一,将激光跟踪仪固定于第一机械臂上,通过第一机械臂将激光跟踪仪延伸到光学元件镜面上方;
4、步骤二,将气浮靶标固定于第二机械臂上,带动气浮靶标按规划路径在镜面上滑动;
5、步骤三,激光跟踪仪采集气浮靶标中心点坐标;
6、步骤四,激光跟踪仪采集被测光学元件几何参数,建立工件坐标系;
7、步骤五,拟合测量数据分析面形图,使用第二机械臂结合磨头进行加工;
8、步骤六,重复二到五步骤,直至被测镜面细磨阶段面形达到技术要求。
9、本发明与现有技术相比的优点在于:
10、(1)本发明利用机械臂进行牵引,可编程规划路径和按路径牵引测量,提高测量重复性,便于加工前后分析面形高低频趋势,利于加工准确性;
11、(2)自动化牵引,牵引力恒定,有效降低人员操作误差与粗大误差,提高测量准确性;
12、(3)可根据不同工况调节牵引速度,提高检测效率,有效降低产品研制周期;
13、(4)本发明利用加工机械臂牵引靶标方法简单,易实现。
技术特征:
1.一种基于激光跟踪仪结合机械臂在位测量光学元件面形的方法,其特征在于:所述方法包括以下步骤:
2.根据权利要求1所述的一种基于激光跟踪仪结合机械臂在位测量光学元件面形的方法,其特征在于:步骤一中激光跟踪仪横向固定安装到第一机械臂上,通过第一机械臂延伸到光学元件镜面顶部,高度为6m-10m之间,激光跟踪仪的激光头光束垂直于光学元件镜面中心,光学镜面底部有重力卸载支撑。
3.根据权利要求1所述的一种基于激光跟踪仪结合机械臂在位测量光学元件面形的方法,其特征在于:步骤一中第一机械臂可根据被测镜面的口径大小、放置位置灵活调整激光头的高度位置和姿态变化。
4.根据权利要求1所述的一种基于激光跟踪仪结合机械臂在位测量光学元件面形的方法,其特征在于:步骤二中所述第二机械臂牵引气浮靶标滑动速度为0.05m/s,移动顺序按横向歩距点来回运行。
5.根据权利要求1所述的一种基于激光跟踪仪结合机械臂在位测量光学元件面形的方法,其特征在于:步骤二中所述规划路径可根据测量元件的形状变更,当镜面为圆形时,按环形歩距点运行,当镜面为正方形时,按网格歩距点运行。
6.根据权利要求1所述的一种基于激光跟踪仪结合机械臂在位测量光学元件面形的方法,其特征在于:步骤三中,激光跟踪仪采集方式为自动扫描测量模式,测量点间距为5mm,采样频率50hz。
7.根据权利要求1所述的一种基于激光跟踪仪结合机械臂在位测量光学元件面形的方法,其特征在于:步骤四中,激光跟踪仪单点采集光学元件环口平面8个测量点并拟合平面度确定+z,采集光学元件外圆24点拟合外圆的中心点,采集光学元件外圆固定靶标点并与外圆中心点构造方向直线确定+x,外圆中心点确定原点建立笛卡尔工件坐标系。
8.根据权利要求1所述的一种基于激光跟踪仪结合机械臂在位测量光学元件面形的方法,其特征在于:步骤五中根据激光跟踪仪采集光学元件镜面轮廓点,在工件坐标系下导出,拟合分析面形,通过第二机械臂更换磨头按照面形图实施修形。
9.根据权利要求1所述的一种基于激光跟踪仪结合机械臂在位测量光学元件面形的方法,其特征在于:步骤六中被测镜面返工后,通过激光跟踪仪测量基准平面、原点、基准轴建立笛卡尔工件坐标,即可运行机械臂与激光跟踪仪测量程序,使其检测与加工配合直至被测镜面面形达到技术要求。
技术总结
本发明公开了一种基于激光跟踪仪结合机械臂在位测量光学元件面形的方法,利用机械臂牵引气浮靶标通过激光跟踪仪在位测量光学元件面形。首先将气浮靶标与机械臂结合,然后使用机械臂带动气浮靶标非接触于光学元件表面,通过机械臂运行程序,带动气浮靶标按规划路径在学元件表面上气浮滑动,此时通过激光跟踪仪在位扫描测量气浮靶标球坐标点,最后通过拟合分析获取光学表面面形轮廓信息。本发明将气浮靶标牵引与测量过程自动化,可恒定牵引速度,协助激光跟踪仪快速定位扫描测量,能有效降低人员操作误差,提高测量效率及准确性。
技术研发人员:杨杰,罗平,陈希瑞,彭仕妹
受保护的技术使用者:中国科学院光电技术研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!