一种水封隧洞探查机器人的制作方法
本发明涉及水下机器人,尤其是涉及一种水封隧洞探查机器人。
背景技术:
1、目前国内外油气管道穿越大中型河流隧道依所处环境分水封隧道和干隧道两类,水封隧道是管道建设的关键路径,水封隧道管道及附属设施长期浸泡在自然水体环境中,隧道会被水中的各种腐蚀物会逐渐腐蚀,造成隧道损坏并且威胁管道安全运行,因此通常会使用水封隧洞探查机器人定期对管道内部检测,但现有的探查机器人只能简单的对隧道内管道进行扫描。
2、公告号为cn217072392u的中国专利申请公开了小直径长距离水封隧道检测机器人,上述专利虽然能对隧道内的管道进行检查,但只能简单的对管道进行扫描检查,无法对管道表面附着有异物进行清理,容易影响检查准确度,并且无法对隧道损坏处的水质、淤泥腐蚀性等进行采样分析,从而不便于针对损坏处的隧道环境确定维修方案,故本发明提供了一种水封隧洞探查机器人。
技术实现思路
1、本发明针对现有技术上的缺陷,提供了一种水封隧洞探查机器人,克服了只能简单的对管道进行扫描检查,无法对管道表面附着有异物进行清理,容易影响检查准确度,并且无法对隧道损坏处的水质、淤泥腐蚀性等进行采样分析,从而不便于针对损坏处的隧道环境确定维修方案的问题。
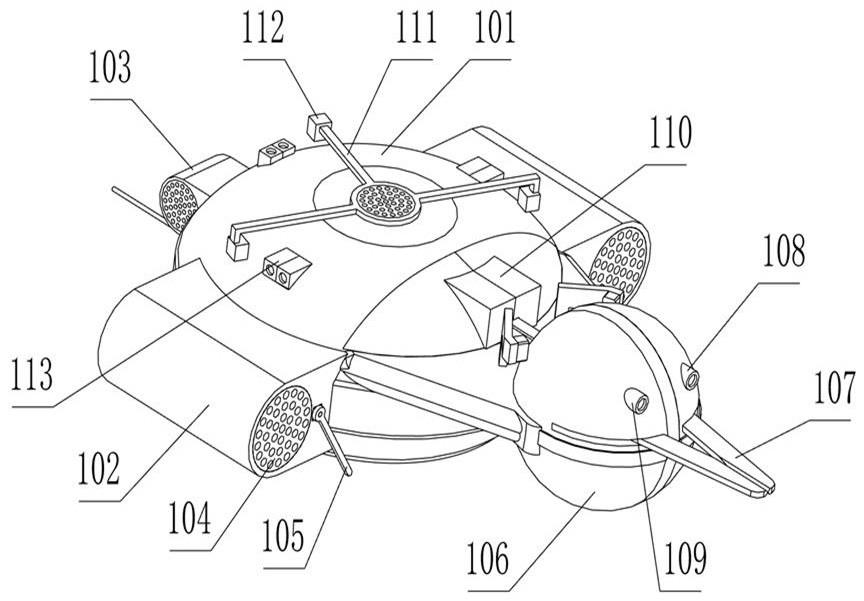
2、为实现上述目的,本发明提供如下技术方案:一种水封隧洞探查机器人,包括壳体,壳体的两侧固定安装有行进圆筒,壳体上还固定安装有调向圆筒,壳体上设置抓取组件,抓取组件包括转动安装在壳体上的球体,球体上转动安装有扇形转板和调位转座,调位转座上固定安装有调位电缸,调位电缸的活塞杆端固定安装有三爪手指气缸,扇形转板和调位电缸固定连接,壳体上设置有存放组件和抛线组件,存放组件包括环形存放转板,壳体内部区域分隔为调重腔室、控制腔室、存储腔室,壳体上固定设置有升降圆筒和方形导管,方形导管用于使得存储腔室和外部连通,环形存放转板和升降圆筒转动配合,环形存放转板上固定安装有多个扇形存放槽,环形存放转板和扇形存放槽设置在存储腔室内,壳体上对称的滑动安装有遮盖滑板,遮盖滑板用于遮盖方形导管。
3、进一步地,行进圆筒、调向圆筒、升降圆筒内均固定安装有驱动电机,驱动电机的输出轴上固定安装有螺旋桨,壳体上转动安装有三臂转板,三臂转板、调向圆筒的两端、行进圆筒的两端、升降圆筒的下端上均固定设置有圆形筛板。
4、进一步地,壳体的两侧固定安装有旋转气缸,旋转气缸的活塞杆两端均固定安装有清理刮板,清理刮板用于对行进圆筒上的圆形筛板表面清理,壳体内固定安装有调重水泵,调重水泵用于使得调重腔室和外部连通。
5、进一步地,壳体上对称的转动安装有摩擦轮,摩擦轮均与球体表面接触,摩擦轮和球体之间存在摩擦力,2个摩擦轮之间设置有传动组三和2个传动组二,球体上对称的转动安装有剪切转板,2个剪切转板之间设置有齿轮组和传动组一。
6、进一步地,球体和三爪手指气缸上均固定安装有扫描组,壳体上固定安装有3个扫描组,壳体上的扫描组的朝向均不相同,扫描组包括1个摄像头和1个探照灯,三臂转板上固定设置有3个主动刷板,主动刷板用于对壳体上的扫描组表面清理,壳体上对称的固定设置有辅助刷板,辅助刷板用于对球体上的扫描组表面清理。
7、进一步地,壳体内固定安装有排液水泵,排液水泵用于使得存储腔室和外部连通,环形存放转板的下表面和壳体接触,环形存放转板上均固定设置有排水筛板,环形存放转板上设置有多个和排水筛板相同直径的通孔。
8、进一步地,遮盖滑板的侧面均固定设置展开齿条,展开齿条和壳体滑动配合,2个展开齿条相对设置,壳体内转动安装有展开齿轮,展开齿条均与展开齿轮啮合构成齿轮齿条副。
9、进一步地,抛线组件包括光纤线,壳体内固定安装有电池组和控制器,电池组和控制器均位于控制腔室内,壳体上固定设置有限位管,控制器的接线端和光纤线的端部滑动接合,控制器的接线端上固定设置有电磁铁,电磁铁和限位管固定连接,光纤线的端部固定设置有磁铁。
10、本发明与现有技术相比的有益效果是:(1)本发明设置抓取组件,能够对前进路线的杂物进行清理,并且能管道表面附着有异物进行清理,避免管道表面附着有异物影响扫描结果,还能对土壤或异物进行抓取采样。(2)本发明通过设置存放组件,能够对抓取组件抓取取样的土壤或异物进行存储,并且还能对各个位置的水进行取样存储,从而便于后续对隧洞内部环境进行分析。(3)本发明通过设置主动刷板和辅助刷板,能够对扫描组的表面进行清理,避免扬起的泥土附着在扫描组上影响后续的扫描。
技术特征:
1.一种水封隧洞探查机器人,包括壳体(101),壳体(101)的两侧固定安装有行进圆筒(102),壳体(101)上还固定安装有调向圆筒(103),其特征在于:
2.根据权利要求1所述的一种水封隧洞探查机器人,其特征在于:所述行进圆筒(102)、调向圆筒(103)、升降圆筒(114)内均固定安装有驱动电机(122),驱动电机(122)的输出轴上固定安装有螺旋桨(123),壳体(101)上转动安装有三臂转板(111),三臂转板(111)、调向圆筒(103)的两端、行进圆筒(102)的两端、升降圆筒(114)的下端上均固定设置有圆形筛板(104)。
3.根据权利要求2所述的一种水封隧洞探查机器人,其特征在于:壳体(101)的两侧固定安装有旋转气缸(131),旋转气缸(131)的活塞杆两端均固定安装有清理刮板(105),清理刮板(105)用于对行进圆筒(102)上的圆形筛板(104)表面清理,壳体(101)内固定安装有调重水泵(133),调重水泵(133)用于使得调重腔室(115)和外部连通。
4.根据权利要求3所述的一种水封隧洞探查机器人,其特征在于:所述壳体(101)上对称的转动安装有摩擦轮(148),摩擦轮(148)均与球体(106)表面接触,摩擦轮(148)和球体(106)之间存在摩擦力,2个摩擦轮(148)之间设置有传动组三(151)和2个传动组二(149),球体(106)上对称的转动安装有剪切转板(107),2个剪切转板(107)之间设置有齿轮组(143)和传动组一(144)。
5.根据权利要求4所述的一种水封隧洞探查机器人,其特征在于:所述球体(106)和三爪手指气缸(141)上均固定安装有扫描组(113),壳体(101)上固定安装有3个扫描组(113),壳体(101)上的扫描组(113)的朝向均不相同,扫描组(113)包括1个摄像头(108)和1个探照灯(109),三臂转板(111)上固定设置有3个主动刷板(112),主动刷板(112)用于对壳体(101)上的扫描组(113)表面清理,壳体(101)上对称的固定设置有辅助刷板(140),辅助刷板(140)用于对球体(106)上的扫描组(113)表面清理。
6.根据权利要求5所述的一种水封隧洞探查机器人,其特征在于:壳体(101)内固定安装有排液水泵(116),排液水泵(116)用于使得存储腔室(118)和外部连通,环形存放转板(120)的下表面和壳体(101)接触,环形存放转板(120)上均固定设置有排水筛板(129),环形存放转板(120)上设置有多个和排水筛板(129)相同直径的通孔。
7.根据权利要求6所述的一种水封隧洞探查机器人,其特征在于:所述遮盖滑板(110)的侧面均固定设置展开齿条(135),展开齿条(135)和壳体(101)滑动配合,2个展开齿条(135)相对设置,壳体(101)内转动安装有展开齿轮(153),展开齿条(135)均与展开齿轮(153)啮合构成齿轮齿条副。
8.根据权利要求7所述的一种水封隧洞探查机器人,其特征在于:所述抛线组件包括光纤线(124),所述壳体(101)内固定安装有电池组(128)和控制器(130),电池组(128)和控制器(130)均位于控制腔室(117)内,壳体(101)上固定设置有限位管(132),控制器(130)的接线端和光纤线(124)的端部滑动接合,控制器(130)的接线端上固定设置有电磁铁(134),电磁铁(134)和限位管(132)固定连接,光纤线(124)的端部固定设置有磁铁。
技术总结
本发明公布了一种水封隧洞探查机器人,属于水下机器人技术领域,包括壳体,壳体的两侧固定安装有行进圆筒,壳体上还固定安装有调向圆筒,壳体上设置抓取组件、存放组件、抛线组件,抓取组件能够对前进路线的杂物进行清理,并且能管道表面附着有异物进行清理,避免管道表面附着有异物影响扫描结果,还能对土壤或异物进行抓取采样,存放组件能够对抓取组件抓取取样的土壤或异物进行存储,并且还能对各个位置的水进行取样存储,从而便于后续对隧洞内部环境进行分析,主动刷板和辅助刷板能够对扫描组的表面进行清理,避免扬起的泥土附着在扫描组上影响后续的扫描。
技术研发人员:王冠宇,柳小洲,张鹏奇,梁丹丹,王平
受保护的技术使用者:深圳市若雅方舟科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!