一种分布式多机器人路径动态调度方法与流程
本发明涉及机器人任务分配领域,具体涉及一种分布式多机器人路径动态调度方法。
背景技术:
1、多机器人系统在现代物流和制造业中应用广泛,例如智能仓储分拣、物流中心运输或最后一公里配送等。多机器人系统的表现优于单个机器人,也更具鲁棒性。然而,如何高效地分配任务给机器人仍然是一个挑战性的问题。智能仓储环境中,多机器人系统规模较大且任务动态下发,其求解过程需要考虑多个约束条件和复杂的路径规划问题。精确算法虽然能得到最优解,但它的求解时间随着问题规模的增加呈指数增长,很难在规定的时间内寻找到任务分配问题的最优解。因此,精确算法并不适用大规模多机器人动态任务分配问题的求解。智能仓储系统中任务分配须满足实时性的要求,且与路径规划紧耦合。因此对于多机器人路径动态调度问题研究具有重要意义。
2、当前任务分配大多采用拍卖算法,传统的拍卖算法对静态问题有较好的效果。但在面对动态任务且与路径规划紧耦合的情况下存在很大的缺陷,不能满足实时性的需要,且不能得到高质量的调度方案。
技术实现思路
1、本发明目的在于针对现有技术的不足,提供一种解决上述问题且接近全局最优解的面向路径动态任务的多机器人分布式任务分配形成方法,该方法基于平行单项拍卖算法,以及结合a-star算法路径寻优,通过机器人之间协同合作解决任务动态调度的问题。智能仓储中的任务术语具体体现为工单。
2、本发明的目的是通过以下技术方案来实现的:一种分布式多机器人路径动态调度方法,该方法包括以下步骤:
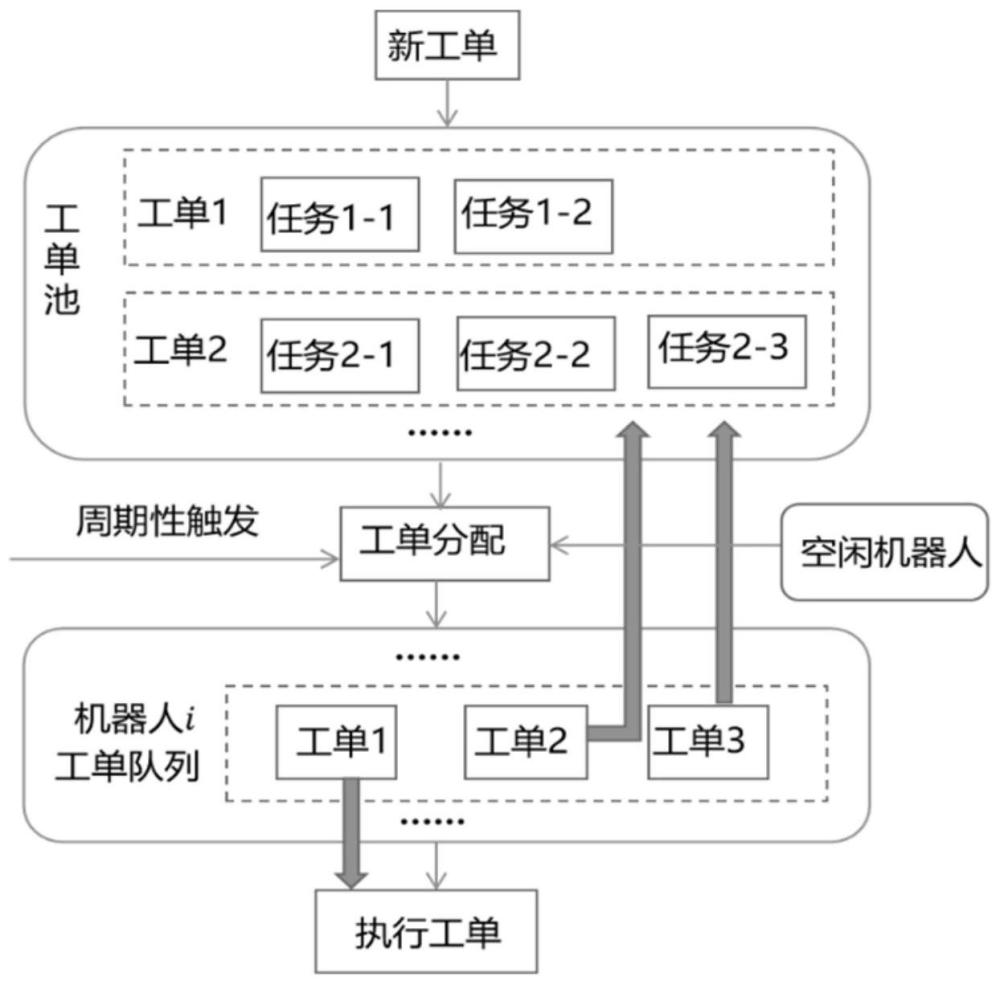
3、s1、工单池内的工单根据综合优先级进行排序;
4、s2、获取空闲机器人id和数量,根据工单的综合优先级选取前n个工单作为任务集合,构建一个时间窗内的系统最优分配模型,并将所述系统最优分配模型转化为针对每一个机器人的对偶模型;
5、s3、改进拍卖算法初始更新:通过a-star算法,对每个机器人依次选取ni个最好的任务填满任务队列并进行价格更新;
6、s4、分布式机器人ri竞拍迭代,并对未收到投标的任务进行反向拍卖,达到收敛条件后停止迭代,得到每个机器人的一个时间窗内的最优工单队列;
7、s5、执行最优工单队列的第一个工单,其余工单返回工单池。
8、进一步地,所述s1中综合优先级的影响因素包括工单的创建时间tj、截止时间dj和初始优先级pj;综合优先级fj具体步骤为:
9、
10、其中wt、wd和wp是总和为1的权重;tn为当前时刻,tm和dm分别为工单池内工单最早创建时间和工单最迟截止时间;pm为最大初始优先级。
11、进一步地,所述s2中,每一个工单都由若干序列任务目标点组成,将整个工单封装成任务分配算法的一个任务参与分配;工单的第一个目标点作为任务起点,最后一个目标点作为任务终点。
12、进一步地,所述s2中,一个时间窗内的系统最优分配模型具体为整数线性规划模型:
13、
14、
15、
16、
17、其中,aij为机器人ri执行任务tj得到的回报,aij=bij-cij,其中bij是完成任务tj所获得的收益,cij为完成任务tj的成本;bij选取一个用于表征无穷大的常量,cij选取为路径距离dij;fij为0-1决策变量,约束1表示一个任务有且只能被分配给一个机器人,约束2表示为机器人ri分配ni个任务。
18、进一步地,所述对偶模型为最优分配模型的公式约束分解到机器人集群的目标函数中得到;具体为:
19、
20、
21、
22、其中,pj为全局价格;其中设价格向量p为由n个任务价格pj组成的n×1维向量,若价格向量p固定,那么使用分布式方法对每个机器人求解其对偶问题的解,得到与原始静态任务分配问题同样的解。
23、进一步地,所述改进拍卖算法初始更新为将本地价格和全局价格pj均初始化为0;依次选取ni个净值最好的任务填满任务队列,具体为选择距离机器人最近的任务加入任务队列;再通过a-star算法选取距离上一个任务终点路径成本最低的任务起点,并将所述任务起点所在的任务加入任务队列直至填满任务队列。
24、进一步地,价格更新规则具体为:
25、
26、其中,为对于机器人ri的最佳净值,vij′为对于机器人ri的次佳净值,ε为避免算法在两个机器人的任务值相等时出现循环而引入的收敛常量。
27、进一步地,所述分布式机器人ri竞拍迭代具体为:
28、机器人任务队列更新:机器人ri更新其上一次迭代的分配信息;首先检查全局价格大于机器人本地价格的任务;对于价格大于机器人在上一次迭代中的出价的任务k,以前的分配被打破,机器人移除任务队列中k及之后的任务k+,记录任务队列长度n′;
29、从不在机器人任务队列中的任务中依次选择净值最好的ni-n′个任务填满任务队列;
30、根据价格更新规则对本地价格进行更新;
31、价格集聚:将每个任务的全局价格更新为机器人对该任务的最高出价;
32、进一步地,所述分布式机器人ri竞拍迭代中的收敛条件为:若则迭代停止。
33、进一步地,所述反向拍卖机制具体为:对于未收到任何投标的任务,启动反向拍卖机制,逐渐降低任务价格以吸引更多的竞标机器人参与;同时,为了确保后续迭代中机器人任务队列的正常更新,相应任务对应的机器人本地价格也相应减少。
34、本发明的有益效果是:本发明通过三个方面具体阐述了分布式条件下多机器人路径动态调度方法的贡献点;首先引入时间窗预测策略以增强算法对动态环境的反应能力,然后提出了一种新的任务分配和路径规划的耦合方法,拍卖投标估值根据迭代情况和路径动态变化;最后设计了反向拍卖机制加速算法收敛;
35、本发明使用分布式的多机器人系统,实现了智能仓储系统中调度系统的高效运行;每一台机器人单独投标竞拍,大大提升了多机器人系统的可扩展性和鲁棒性,同时减少单个机器人的计算负载,有利于自主机器人整体稳定性。在保持运行效率的前提下,与现有算法相比,改进平行拍卖算法生成的任务分配方案的平均总旅行距离大大缩短,工单总完成时间也随之减少。在总旅行延迟距离和运行效率方面有很大竞争力。
技术特征:
1.一种分布式多机器人路径动态调度方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的一种分布式多机器人路径动态调度方法,其特征在于,
3.根据权利要求1所述的一种分布式多机器人路径动态调度方法,其特征在于,所述s2中,每一个工单都由若干序列任务目标点组成,将整个工单封装成任务分配算法的一个任务参与分配;工单的第一个目标点作为任务起点,最后一个目标点作为任务终点。
4.根据权利要求1所述的一种分布式多机器人路径动态调度方法,其特征在于,所述s2中,一个时间窗内的系统最优分配模型具体为整数线性规划模型:
5.根据权利要求4所述的一种分布式多机器人路径动态调度方法,其特征在于,所述对偶模型为最优分配模型的公式约束分解到机器人集群的目标函数中得到;具体为:
6.根据权利要求1所述的一种分布式多机器人路径动态调度方法,其特征在于,所述改进拍卖算法初始更新为将本地价格和全局价格pj均初始化为0;依次选取ni个净值最好的任务填满任务队列,具体为选择距离机器人最近的任务加入任务队列;再通过a-star算法选取距离上一个任务终点路径成本最低的任务起点,并将所述任务起点所在的任务加入任务队列直至填满任务队列。
7.根据权利要求1所述的一种分布式多机器人路径动态调度方法,其特征在于,价格更新规则具体为:
8.根据权利要求1所述的一种分布式多机器人路径动态调度方法,其特征在于,所述分布式机器人ri竞拍迭代每个拍卖在机器人上单独进行,具体为:
9.根据权利要求8所述的一种分布式多机器人路径动态调度方法,其特征在于,所述分布式机器人ri竞拍迭代中的收敛条件为:若则迭代停止。
10.根据权利要求1所述的一种分布式多机器人路径动态调度方法,其特征在于,所述反向拍卖机制具体为:对于未收到任何投标的任务,启动反向拍卖机制,逐渐降低任务价格以吸引更多的竞标机器人参与;同时,为了确保后续迭代中机器人任务队列的正常更新,相应任务对应的机器人本地价格也相应减少。
技术总结
本发明公开了一种分布式多机器人路径动态调度方法。首先引入时间窗预测策略以增强算法对动态环境的反应能力,然后提出了一种新的任务分配和路径规划的耦合方法,拍卖投标估值根据迭代情况和路径动态变化;最后设计了反向拍卖机制加速算法收敛;本发明使用分布式的多机器人系统,实现了智能仓储系统中调度系统的高效运行;拍卖是分布式的,但每个拍卖都是在所有机器人上单独计算的,大大提升了多机器人系统的可扩展性和鲁棒性,同时减少单个机器人的计算负载。在保持运行效率的前提下,与现有算法相比,改进的平行拍卖算法生成的任务分配方案的平均总旅行距离大大缩短,工单总完成时间也随之减少。在总旅行延迟距离和运行效率方面有很大竞争力。
技术研发人员:严翠翠,罗江勇,吴剑武,许向东,郑利胜,施盛华,潘斌,陈鹏飞
受保护的技术使用者:温州市工业科学研究院
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!