一种多霍尔通道角度传感器及低滞后数据融合方法
本发明涉及霍尔角度传感器,尤其涉及一种多霍尔通道角度传感器及低滞后数据融合方法。
背景技术:
1、霍尔角度传感器,也称磁编码器,是一种用于测量旋转角度或线性位移。霍尔角度传感器使用磁场来测量位置,并将其转换为相应的电信号。霍尔角度传感器在机器人、医疗器械、自动化等领域具有广泛的应用背景。信号抖动是影响霍尔角度传感器测量精度的关键因素之一。目前,主要通过移动递推平均滤波算法实现信号滤波。由于移动递推平均滤波算法的存在,导致测量信号存在较大滞后,难以慢速高速动态测试场景。
技术实现思路
1、本发明的目的是为了解决现有技术中存在测量信号存在较大滞后,难以慢速高速动态测试场景的缺点,而提出的一种多霍尔通道角度传感器及低滞后数据融合方法。
2、为了实现上述目的,本发明采用了如下技术方案:
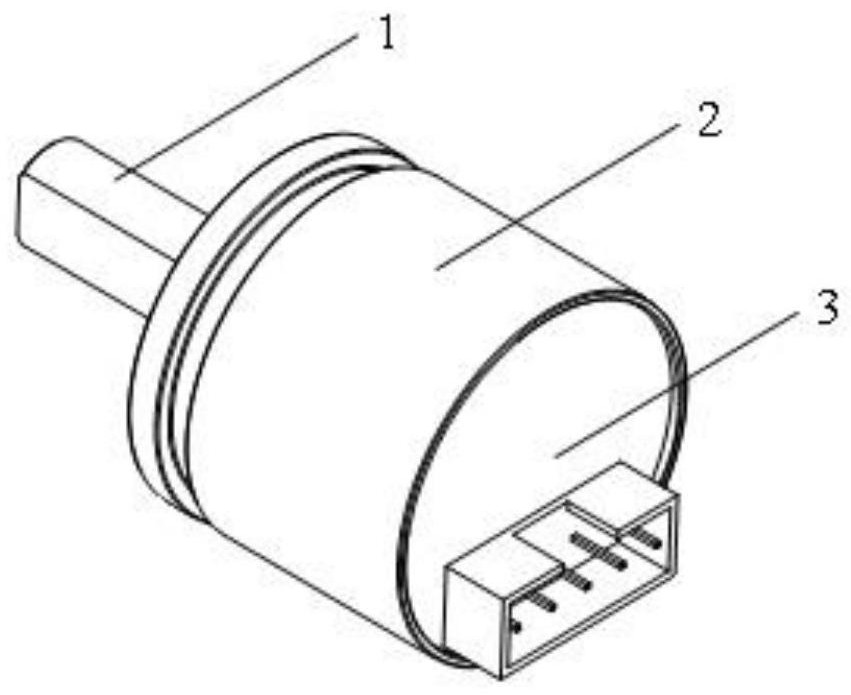
3、一种多霍尔通道角度传感器,包括转动轴系、外壳、信号采集模块,所述转动轴系和信号采集模块安装于外壳内,转动轴系包括转轴、卡簧、轴承a、轴承b和径向磁柱,所述轴承a、轴承b安装于外壳内,转轴安装于轴承a、轴承b的内圈,径向磁柱安装于转轴的底端,卡簧设于外壳上,且卡簧与转轴配合。
4、优选的,所述信号采集模块包括pcb板、霍尔传感器组、信号快插端子,霍尔传感器组包括多个霍尔传感器元件,多个霍尔传感器元件随转轴轴线径向均匀分布于pcb板之上。
5、优选的,所述转轴一端设有盲孔,径向磁柱通过过盈方式嵌入于盲孔内。
6、优选的,所述径向磁柱随同转轴回转过程中,将同步磁化霍尔传感器组内各霍尔传感器元件,并产生n组角位移响应信号θ={θ1,θ2,...θn}。
7、优选的,所述n组角位移响应信号θ={θ1,θ2,...θn}存在可定量辨识的相位差
8、本发明还提出了一种多霍尔通道角度传感器的低滞后数据融合方法,包括以下步骤:
9、s1:传感器初始化;
10、s2:同步磁化霍尔传感器组内各霍尔传感器元件相位辨识计算;
11、s3:霍尔传感器元件相位修正;
12、s4:多通道数据融合。
13、优选的,所述s1中,针对n组角位移响应信号θ={θ1,θ2,...θn}连续采集j次,并通过计算得出各通道角位移响应初始值
14、优选的,所述s2中,各通道角位移响应相位偏差通过计算得出。
15、优选的,所述s3中,通过对通道角位移响应θ1进行修正,形成相位修正后的角位移响应向量
16、优选的,所述s4中,通过实现抖动消除,并融合得出最终角位移θo。
17、本发明中,所述一种多霍尔通道角度传感器及低滞后数据融合方法的有益效果:
18、在径向磁柱磁场范围内,圆周对称设置n个霍尔传感器,构成一霍尔传感器组,并使其相对位置固定。径向磁柱旋转过程中,同步磁化霍尔传感器组内各元件,并获得n组角位移响应信号θ={θ1,θ2,...θn},通过相位辨识与修正,基于角位移响应信号向量直接融合得出最终角位移θo,实现信号消抖,由于n组角位移响应信号θ={θ1,θ2,...θn}均为当前信号量,不存在滞后,因此测量数据融合结果实时性将大大提高;
19、角度测量实时性高,通过硬件方式,扩张被测量当前观测数,数据不存在滞后,因此测量数据融合结果实时性将大大提高。多通道数据融合算法均为代数方法,解算速度快,基于8-bit、16mhz单片机实时解算速度仅需约0.5ms。
20、本发明测量信号有效消抖,测量精度高,测量实时性高,适用于高速动态测试场景。
技术特征:
1.一种多霍尔通道角度传感器,包括转动轴系(1)、外壳(2)、信号采集模块(3),其特征在于,所述转动轴系(1)和信号采集模块(3)安装于外壳(2)内,转动轴系(1)包括转轴(11)、卡簧(12)、轴承a(13)、轴承b(14)和径向磁柱(15),所述轴承a(13)、轴承b(14)安装于外壳(2)内,转轴(11)安装于轴承a(13)、轴承b(14)的内圈,径向磁柱(15)安装于转轴(11)的底端,卡簧(12)设于外壳(2)上,且卡簧(12)与转轴(11)配合。
2.根据权利要求1所述的一种多霍尔通道角度传感器,其特征在于,所述信号采集模块(3)包括pcb板(31)、霍尔传感器组(32)、信号快插端子(33),霍尔传感器组(32)包括多个霍尔传感器元件,多个霍尔传感器元件随转轴(11)轴线径向均匀分布于pcb板(31)之上。
3.根据权利要求2所述的一种多霍尔通道角度传感器,其特征在于,所述转轴(11)一端设有盲孔,径向磁柱(15)通过过盈方式嵌入于盲孔内。
4.根据权利要求3所述的一种多霍尔通道角度传感器,其特征在于,所述径向磁柱(15)随同转轴(11)回转过程中,将同步磁化霍尔传感器组(32)内各霍尔传感器元件,并产生n组角位移响应信号θ={θ1,θ2,...θn}。
5.根据权利要求4所述的一种多霍尔通道角度传感器,其特征在于,所述n组角位移响应信号θ={θ1,θ2,...θn}存在可定量辨识的相位差
6.一种多霍尔通道角度传感器的低滞后数据融合方法,其特征在于,包括以下步骤:
7.根据权利要求6所述的一种多霍尔通道角度传感器的低滞后数据融合方法,其特征在于,所述s1中,针对n组角位移响应信号θ={θ1,θ2,...θn}连续采集j次,并通过计算得出各通道角位移响应初始值
8.根据权利要求7所述的一种多霍尔通道角度传感器的低滞后数据融合方法,其特征在于,所述s2中,各通道角位移响应相位偏差通过计算得出。
9.根据权利要求8所述的一种多霍尔通道角度传感器的低滞后数据融合方法,其特征在于,所述s3中,通过对通道角位移响应θ1进行修正,形成相位修正后的角位移响应向量
10.根据权利要求9所述的一种多霍尔通道角度传感器的低滞后数据融合方法,其特征在于,所述s4中,通过实现抖动消除,并融合得出最终角位移θo。
技术总结
本发明属于霍尔角度传感器领域,尤其是一种多霍尔通道角度传感器及低滞后数据融合方法,针对现有的测量信号存在较大滞后,难以慢速高速动态测试场景问题,现提出如下方案,其包括转动轴系、外壳、信号采集模块,所述转动轴系和信号采集模块安装于外壳内,转动轴系包括转轴、卡簧、轴承A、轴承B和径向磁柱,所述轴承A、轴承B安装于外壳内,转轴安装于轴承A、轴承B的内圈,径向磁柱安装于转轴的底端,卡簧设于外壳上,且卡簧与转轴配合,本发明测量信号有效消抖,测量精度高,测量实时性高,适用于高速动态测试场景。
技术研发人员:华洪良,吴小锋,史乃煜,杨阳,张姻,雷德福,郑隽一
受保护的技术使用者:常州工学院
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!