基于多特征驱动的神经网络地磁定位方法及计算机设备
本申请属于室内定位领域,尤其涉及一种基于多特征驱动的神经网络地磁定位方法、计算机可读存储介质及计算机设备。
背景技术:
1、随着微机电系统(mems)的发展,目前移动终端安装基于mems传感器已经成为标配,使得基于位置的服务(lbs)得到更加广泛应用,如行人和目标的导航、智能广告和基于位置的推文发帖等。在室外环境中,全球导航卫星系统(gnss)能够全天候、全天时地为全球用户提供高效稳定的定位导航服务,实现精确的实时定位。然而,室内环境比开放式的室外场景更加复杂,微弱的卫星信号很容易被建筑物或其他障碍物阻挡,导致在室内环境中无法正常工作满足用户的位置服务要求。因此,实现普适、廉价并且具有更高精度的室内定位技术具有十分重要的意义。
2、研究人员在wifi定位、蓝牙定位、超声波定位、视觉定位等方面展开了一系列研究。基于wifi和蓝牙的定位方法成本较低,但是容易受到环境影响,如多径传播、信号吸收等;基于超声波的定位精度较高,但是需要额外的设备采集声音信号;基于视觉的定位应用广泛,但易受到环境遮挡以及光线的影响,并且隐私难以保障。在行人航迹推算定位(pdr)定位中,嵌入在移动终端中的imu传感器可以通过估计室内环境中的行人行走特征(包括步频检测、步长估计和方向角估计)来协助定位。pdr在短距离内具有相对的定位精度,且成本低、体积小、自主性强,但是pdr定位会产生长期定位的累积误差和漂移误差。
3、地磁信号的时间稳定性和普遍性使基于地磁指纹的定位成为可能。基于地磁指纹定位的关键因素是在动态范围受限的地磁序列中识别出更多与位置信息相关的独特特征,从而获得稳定可靠的定位结果。因此,考虑使用地磁序列来学习时间相关位置标签与地磁序列之间的关系,实现室内定位。基于地磁指纹的定位能够克服pdr定位产生的长期定位的累积误差和漂移误差,且不依赖于初始位置,因此能够实现独立定位。然而,利用离散地磁信号可能会因随机噪声和相似磁场读数而导致定位特征模糊。
技术实现思路
1、本申请的目的在于提供一种基于多特征驱动的神经网络地磁定位方法、计算机可读存储介质及计算机设备,旨在解决pdr定位会产生长期定位的累积误差和漂移误差,利用离散地磁信号可能会因随机噪声和相似磁场读数而导致定位特征模糊的问题。
2、第一方面,本申请提供了一种基于多特征驱动的神经网络地磁定位方法,所述方法包括:
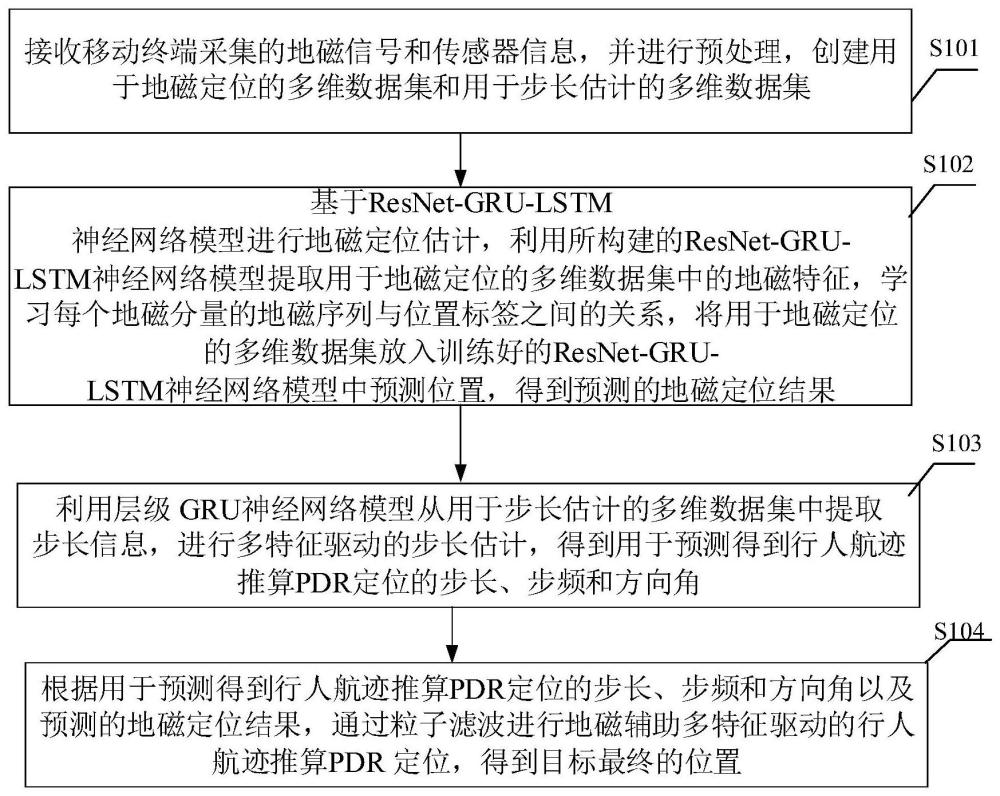
3、s101、接收移动终端采集的地磁信号和传感器信息,并进行预处理,创建用于地磁定位的多维数据集和用于步长估计的多维数据集;
4、s102、基于resnet-gru-lstm神经网络模型进行地磁定位估计,利用所构建的resnet-gru-lstm神经网络模型提取用于地磁定位的多维数据集中的地磁特征,学习每个地磁分量的地磁序列与位置标签之间的关系,将用于地磁定位的多维数据集放入训练好的resnet-gru-lstm神经网络模型中预测位置,得到预测的地磁定位结果;
5、s103、利用层级gru神经网络模型从用于步长估计的多维数据集中提取步长信息,进行多特征驱动的步长估计,得到用于预测得到行人航迹推算pdr定位的步长、步频和方向角;
6、s104、根据用于预测得到行人航迹推算pdr定位的步长、步频和方向角以及预测的地磁定位结果,通过粒子滤波进行地磁辅助多特征驱动的行人航迹推算pdr定位,得到目标最终的位置。
7、第二方面,本申请提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如所述的基于多特征驱动的神经网络地磁定位方法的步骤。
8、第三方面,本申请提供了一种计算机设备,包括:
9、一个或多个处理器;
10、存储器;以及
11、一个或多个计算机程序,所述处理器和所述存储器通过总线连接,其中所述一个或多个计算机程序被存储在所述存储器中,并且被配置成由所述一个或多个处理器执行,所述处理器执行所述计算机程序时实现如所述的基于多特征驱动的神经网络地磁定位方法的步骤。
12、在本申请中,由于基于resnet-gru-lstm神经网络模型进行地磁定位估计,resnet具有出色的特征提取能力,lstm可以提取全局地磁特征以获得更准确的信息,从而进一步提高了resnet-gru-lstm神经网络模型的预测能力,因此定位误差小。又由于利用层级gru神经网络模型从用于步长估计的多维数据集中提取步长信息,进行多特征驱动的步长估计,因此可以学习到更精确的特征来更精确、更可靠地估算不同身高行人的每步的步长。又由于根据用于预测得到行人航迹推算pdr定位的步长、步频和方向角以及预测的地磁定位结果,通过粒子滤波进行地磁辅助多特征驱动的行人航迹推算pdr定位,得到目标最终的位置,因此能有效消除地磁定位和pdr定位带来的模糊定位误差和异常值,从而显著提高了定位性能,可以有效缓解设备的异构性,并具有很强的鲁棒性。本申请对于不同设备、场景和路径具有很大的实用性和灵活性。
技术特征:
1.一种基于多特征驱动的神经网络地磁定位方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述创建用于地磁定位的多维数据集具体包括:
3.如权利要求2所述的方法,其特征在于,所述构建包含5维地磁分量的地磁数据集之后,所述方法还包括:
4.如权利要求1所述的方法,其特征在于,传感器信息包括加速度、陀螺仪数据和方向数据;
5.如权利要求1所述的方法,其特征在于,在s102中,利用resnet34作为第一层神经网络模型,其是使用捷径连接架构来学习所需的映射,resnet34包括conv1、conv2_x、conv3_x、conv4_x和conv5_x,其中conv1由一个7×7卷积层和最大池化层组成,conv2_x、conv3_x、conv4_x和conv5_x分别由3、4、6和3个残差块组成,每个残差块包含两个卷积层,残差块由多个级残差映射和恒等映射组成,分割后的磁序列发送到resnet34;
6.如权利要求1所述的方法,其特征在于,在s103中,所述层级gru神经网络模型包含一个gru层、两个lstm层和一个回归层,每一层之后都有一个dropout层;
7.如权利要求1所述的方法,其特征在于,s104具体包括以下步骤:
8.如权利要求7所述的方法,其特征在于,
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至8任一项所述的基于多特征驱动的神经网络地磁定位方法的步骤。
10.一种计算机设备,包括:
技术总结
本申请适用于室内定位领域,提供了一种基于多特征驱动的神经网络地磁定位方法、计算机可读存储介质及计算机设备。所述方法包括:接收移动终端采集的地磁信号和传感器信息,创建用于地磁定位和步长估计的多维数据集;基于ResNet‑GRU‑LSTM神经网络模型进行地磁定位估计,得到预测的地磁定位结果;利用层级GRU神经网络模型得到用于预测得到行人航迹推算PDR定位的步长、步频和方向角;根据步长、步频和方向角以及地磁定位结果,通过粒子滤波进行地磁辅助多特征驱动的PDR定位,得到目标最终的位置。本申请能有效消除地磁定位和PDR定位带来的模糊定位误差和异常值,从而显著提高了定位性能,可以有效缓解设备的异构性,并具有很强的鲁棒性。
技术研发人员:严素清,苏雅兰,肖建明,纪元法,付文涛,赵松克,梁维彬,贾茜子
受保护的技术使用者:桂林电子科技大学
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!