一种RIS辅助两坐标雷达进行三维定位的方法
本发明涉及一种ris辅助两坐标雷达进行三维定位的方法,属于雷达。
背景技术:
1、两坐标雷达是产生的最早的雷达体制,能够提供空中目标的距离和方位信息。经过多年的发展,两坐标雷达技术已趋于成熟。由于其设备量少、造价低廉、简单可靠的特点,仍然被大量使用在战场监视中。然而两坐标雷达的天线俯仰面通常只有一个通道,难以采用常规的和差波束测高方法得到目标高度。当目标距雷达较远时,目标高度估计不准会导致其在水平面上产生平移,进而降低探测与跟踪精度,影响情报质量。而现代战争对目标的探测精度有着较高的要求,如何对两坐标雷达进行目标高度估计是亟待解决的难题之一。
2、目前目标三维坐标的测量有两种方式:(1)两坐标雷达与测高雷达配合使用;(2)由三坐标雷达直接测量目标的三维信息。这两种方式各有其优缺点。对第一种方式,由于两坐标雷达发展较早技术成熟,用两坐标雷达进行目标方位和距离测量,由测高雷达进行专门的高度补测,具有精度高,工作简单,技术容易实现,且成本低的优点,因此是目前空防体制中广泛采用的方式。但这种方式需要为两坐标雷达专门配属测高雷达,测量过程复杂,情报数据的处理环节也因此增加,实时性较差,也不利于雷达阵地的机动。对第二种方式,三坐标雷达直接测量目标三维信息,精度较高,实时性较好,但由于三坐标雷达生产、训练和维护成本高、技术复杂,目前使用不多。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种ris辅助两坐标雷达进行三维定位的方法,相比于专门配属测高雷达,ris低功耗低成本,不仅能通过无人机携带进行随时移动,还能通过移相改变电磁波传播方向,再由雷达采用多波束接收不同俯仰角下的目标回波信号,不需要融合信息的数据传输,更易实现高精度相位对齐。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、本发明提供了一种ris辅助两坐标雷达进行三维定位的方法,包括:
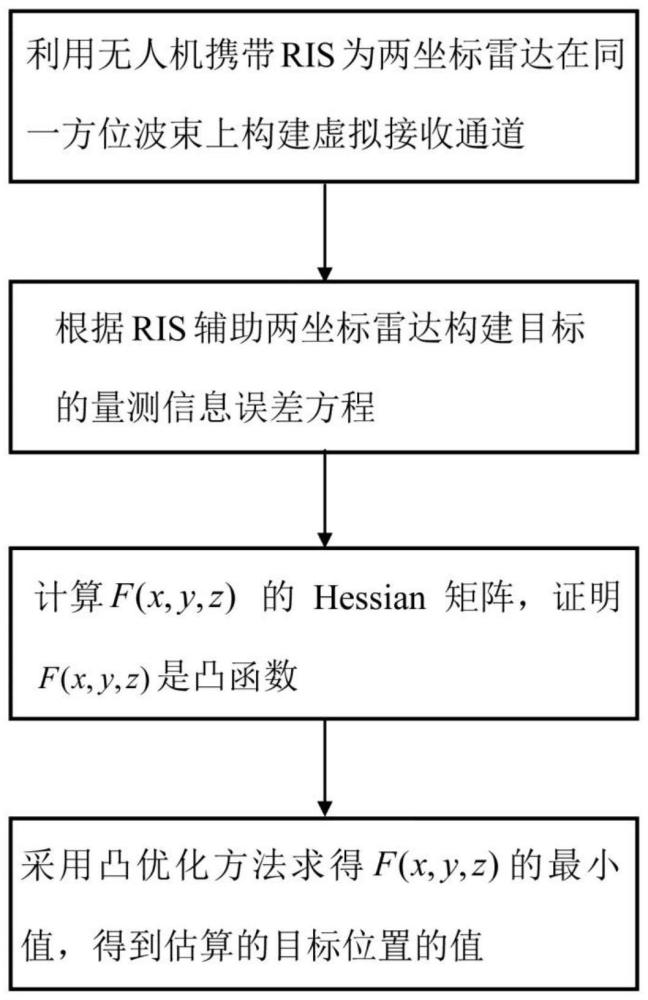
4、通过ris与两坐标雷达结合,构建出目标回波信号的直接接收通道和辅助接收通道;
5、根据ris辅助两坐标雷达构建目标的量测信息误差方程f(x,y,z);
6、根据目标的量测信息误差方程f(x,y,z)估算出目标位置(x,y,z)的值。
7、进一步的,所述通过ris与两坐标雷达结合,构建出目标回波信号的直接接收通道和辅助接收通道,包括:
8、将ris挂载在无人机上,设定无人机飞行时,使其始终处于雷达的发射波束内,由目标直接到雷达的回波通道为直接接收通道,由目标到ris,再由ris反射到雷达的回波通道为辅助接收通道。
9、进一步的,所述ris在同一探测波束内设置有单个或多个,ris的分布位置,使直接接收通道和各辅助接收通道对目标的观测角度均不同。
10、进一步的,所述目标的量测信息误差方程f(x,y,z)的公式如下:
11、
12、式中:(x,y,z)为探测的目标z=(x,y,z)的三维空间坐标,(xri,yri,zri),i=1,…,n为第i个ris的三维空间坐标,(xr,yr,zr)为两坐标雷达的三维空间坐标;
13、r和θ分别为直接接收通道中雷达测得目标的距离和方位角,表示为;
14、
15、θ=arctan((y-yr)/(x-xr))+ω2;
16、d_sumi为第i个间接接收通道中测得的从雷达到目标再到第i个ris的距离和,表示为:
17、
18、其中:ω1服从正态分布σr为雷达测距误差;ω2服从正态分布σθ为雷达测角误差。
19、进一步的,所述根据目标的量测信息误差方程f(x,y,z)估算出目标位置(x,y,z)的值,包括:
20、计算出目标的量测信息误差方程f(x,y,z)的hessian矩阵;
21、证明量测信息误差方程f(x,y,z)是凸函数;
22、采用凸优化的方法估算出目标位置(x,y,z)的值。
23、进一步的,所述目标的量测信息误差方程f(x,y,z)的hessian矩阵为:
24、
25、其中:
26、
27、
28、
29、
30、
31、
32、
33、其中,α3=2x-2xr,α4=2y-2yr,α5=2z-2zr,α6=2x-2xri,α7=2y-2yri,α8=2z-2zri。
34、进一步的,所述证明量测信息误差方程f(x,y,z)是凸函数,包括:
35、利用matlab中symbolic math toolbox计算hessian矩阵,证明对于任意的(x,y,z)和非零向量v=[a,b,c],vt*h*v≥0,即证明:hessian矩阵是半正定的,f(x,y,z)是凸函数。
36、进一步的,所述采用凸优化的方法估算出目标位置(x,y,z)的值包括:
37、采用凸优化的方法求得目标的量测信息误差方程f(x,y,z)的最小值,得到估算的目标位置(x,y,z)的值为:
38、其中,ω表示ris辅助单站雷达探测目标的三维空间。
39、与现有技术相比,本发明所达到的有益效果:
40、本发明所述方法在同一探测波束内引入单个或多个ris,结合两坐标雷达站俯仰维宽波束的特点,构建俯仰维虚拟多站接收通道,探索两坐标雷达多视角空间分集增益,利用其冗余信息进行目标三维定位。相比于专门配属测高雷达,ris低功耗低成本,不仅能通过无人机携带进行随时移动,还能通过移相改变电磁波传播方向,再由雷达采用多波束接收不同俯仰角下的目标回波信号,不需要融合信息的数据传输,更易实现高精度相位对齐。
技术特征:
1.一种ris辅助两坐标雷达进行三维定位的方法,其特征是,包括:
2.根据权利要求1所述的ris辅助两坐标雷达进行三维定位的方法,其特征是,所述通过ris与两坐标雷达结合,构建出目标回波信号的直接接收通道和辅助接收通道,包括:
3.根据权利要求2所述的ris辅助两坐标雷达进行三维定位的方法,其特征是,所述ris在同一探测波束内设置有单个或多个,ris的分布位置,使直接接收通道和各辅助接收通道对目标的观测角度均不同。
4.根据权利要求1所述的ris辅助两坐标雷达进行三维定位的方法,其特征是,所述目标的量测信息误差方程f(x,y,z)的公式如下:
5.根据权利要求4所述的ris辅助两坐标雷达进行三维定位的方法,其特征是,所述根据目标的量测信息误差方程f(x,y,z)估算出目标位置(x,y,z)的值,包括:
6.根据权利要求5所述的ris辅助两坐标雷达进行三维定位的方法,其特征是,所述目标的量测信息误差方程f(x,y,z)的hessian矩阵为:
7.根据权利要求6所述的ris辅助两坐标雷达进行三维定位的方法,其特征是,所述证明量测信息误差方程f(x,y,z)是凸函数,包括:
8.根据权利要求5所述的ris辅助两坐标雷达进行三维定位的方法,其特征是,所述采用凸优化的方法估算出目标位置(x,y,z)的值包括:
技术总结
本发明公开了一种RIS辅助两坐标雷达进行三维定位的方法,包括:通过RIS与两坐标雷达结合,构建出目标回波信号的直接接收通道和辅助接收通道;根据RIS辅助两坐标雷达构建目标的量测信息误差方程;根据目标的量测信息误差方程估算出目标位置的值。本发明在同一探测波束内引入单个或多个RIS,结合两坐标雷达站俯仰维宽波束的特点,构建俯仰维虚拟多站接收通道,探索两坐标雷达多视角空间分集增益,利用其冗余信息进行目标三维定位。RIS低功耗低成本,能通过无人机携带进行随时移动,还能通过移相改变电磁波传播方向,不需要融合信息的数据传输,更易实现高精度相位对齐。
技术研发人员:赵珊珊,谢飚,安吉瑞,刘子威
受保护的技术使用者:南京邮电大学
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!