一种基于鲁棒卡尔曼滤波的潜油机器人定位方法及系统
本发明属于机器人定位领域,尤其涉及一种基于鲁棒卡尔曼滤波的潜油机器人定位方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、石油储罐的安全运行是原油储备的首要目标, 通过潜油机器人对在油环境下的储罐罐底进行检测,能够有效保障储罐本质安全和储罐长周期运行。然而,由于服役状态下原油储罐的复杂性(包括密闭空间、在油环境、信号衰减强烈、干扰众多等),导致潜油机器人在石油储罐罐底的定位信号包含较强的噪声,严重影响了潜油机器人的定位精度。
3、发明人发现,现有的潜油机器人定位方法存在以下缺陷:
4、1、现有的潜油机器人定位方法主要是针对室外以及水下的工作环境做出的改进,然而潜油机器人的工作环境为在油、密闭的空间中,信号衰减严重,环境干扰较强,在收集机器人的坐标数据时极易导致离群数据的污染,现有的处理离群点数据方法采用3σ准则清除离群点,通过调节系数降低离群点的干扰作用等,然而潜油机器人工作环境的复杂性,导致上述方法对离群数据判别不准确、填补不准确,致使其在潜油机器人的导航定位应用中精度不足,影响机器人的作业效果。
5、2、现有的定位方法需要提前确定定位对象的结构参数且保持不变。然而不同原油储罐经历多次检修改造后,结构参数发生了很大变化,具有很强的未知性,且不同的原油储罐的结构尺寸以及内部原油品质是不同的,而且潜油机器人在储罐内工作也会影响储罐内环境的变化,这些都会导致潜油机器人定位算法参数会随时间变化,倘若不能将定位参数在线更新,潜油机器人的定位精度会随着工作时长的增加而降低。
技术实现思路
1、为了解决上述背景技术中存在的至少一项技术问题,本发明提供一种基于鲁棒卡尔曼滤波的潜油机器人定位方法及系统,首先,针对潜油机器人坐标数据存在离群点的问题,提出了一种鲁棒卡尔曼滤波算法用于解决潜油机器人在原油储罐内定位的信号处理任务,通过对包含离群点污染的潜油机器人定位数据进行信息挖掘,获得潜油机器人定位信号滤波所需的参数,其次,针对潜油机器人工作环境变化导致算法参数改变的问题,提出了一种可以在线更新定位参数的潜油机器人定位系统,可以在潜油机器人工作时利用在线数据对鲁棒卡尔曼滤波算法的参数进行实时更新和校正,进而提高潜油机器人作业时定位精度,保证工作质量。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供一种基于鲁棒卡尔曼滤波的潜油机器人定位方法,包括如下步骤:
4、获取潜油机器人在储罐内的坐标数据样本集和控制输入;
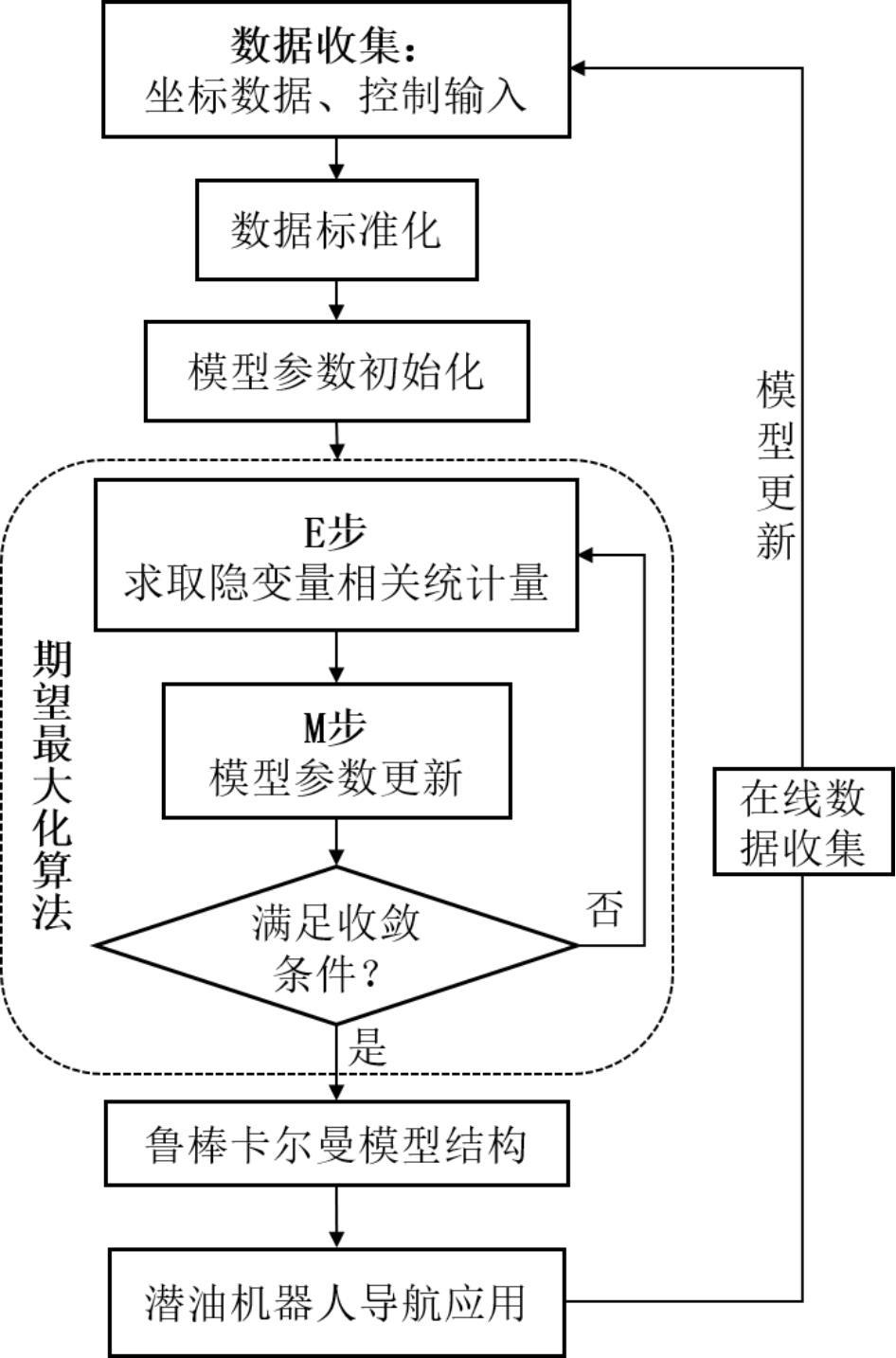
5、结合潜油机器人在储罐内的坐标数据样本集和控制输入,利用期望最大化算法训练得到鲁棒卡尔曼滤波算法的模型参数;其中,对鲁棒卡尔曼滤波算法进行训练的过程包括:
6、确定鲁棒卡尔曼滤波算法模型的结构,在该鲁棒卡尔曼滤波算法模型的结构下,在e步学习模型隐变量的后验分布期望,在m步更新模型的参数,以及确定期望最大化算法迭代的终止条件;
7、基于训练后的鲁棒卡尔曼滤波算法对新的坐标数据进行预测得到潜油机器人在储罐内当前时刻的位置信息。
8、进一步地,所述潜油机器人在储罐内的坐标数据样本集获取的方法为:
9、为确定潜油机器人在工作时的坐标位置与姿势,在机器人的头部和尾部各布置一组定位传感器,假设s(s1,s2)为潜油机器人的坐标,其中s1为纬度坐标值,s2为经度坐标值。
10、进一步地,鲁棒卡尔曼滤波算法模型的结构的确定方法为:
11、确定鲁棒卡尔曼滤波算法模型中,状态值之间的动态关系和观测值与状态值之间的关系;
12、根据学生t分布的性质,利用学生t分布代替高斯分布,对状态值之间的动态关系和观测值与状态值之间的关系进行改写。
13、进一步地,获取潜油机器人在储罐内的坐标数据样本和控制输入后,对坐标数据样本集和控制输入进行无量纲化处理,将数据集的方差转换为单位方差。
14、进一步地,所述e步学习模型隐变量的后验分布期望,具体包括:
15、根据鲁棒卡尔曼滤波算法模型的结构,计算得到完整数据的对数似然函数;
16、对完整数据的似然函数求取关于隐变量的后验分布;
17、通过前向传播学习和后向传播学习得到隐变量的后验分布中的未知参数,求取隐变量的相关统计量。
18、进一步地,鲁棒卡尔曼滤波算法的模型参数的参数包括:状态转换矩阵、输出矩阵、真实值和观测值的精度矩阵和学生t分布的自由度。
19、进一步地,在m步更新模型的参数的方法为:通过对似然函数的后验分布求导,并令求导结果等于零,得到对应的参数更新公式进行更新。
20、进一步地,将观测数据的似然函数作为参数学习过程中迭代收敛的判定条件。
21、本发明的第二个方面提供一种基于鲁棒卡尔曼滤波算法的潜油机器人定位系统,包括:
22、数据获取模块,其用于获取潜油机器人在储罐内的坐标数据样本集和控制输入;
23、模型参数确定模块,其用于结合潜油机器人在储罐内的坐标数据样本集和控制输入,利用期望最大化算法训练得到鲁棒卡尔曼滤波算法的模型参数;其中,对鲁棒卡尔曼滤波算法进行训练的过程包括:
24、确定鲁棒卡尔曼滤波算法模型的结构,在该鲁棒卡尔曼滤波算法模型的结构下,在e步学习模型隐变量的后验分布期望,在m步更新模型的参数,以及确定期望最大化算法迭代的终止条件;
25、定位模块,基于训练后的鲁棒卡尔曼滤波算法对新的坐标数据进行预测得到潜油机器人在储罐内当前时刻的位置信息。
26、与现有技术相比,本发明的有益效果是:
27、针对坐标数据存在离群点污染导致卡尔曼滤波算法精度降低的问题,本发明提出了一种基于鲁棒卡尔曼滤波算法的潜油机器人定位方法,即利用长尾分布——学生t分布代替传统卡尔曼滤波算法中的高斯分布,相比于已有的鲁棒卡尔曼滤波算法,该方法能够更加有效的处理潜油机器人导航定位中离群数据污染的问题;增强卡尔曼滤波算法处理离群坐标数据的能力,保证卡尔曼滤波算法的鲁棒性,提高潜油机器人在原油储罐内的定位精度。
28、针对鲁棒卡尔曼滤波算法参数随工作环境改变的问题,本发明提出了一种可以在线更新参数的潜油机器人定位系统,可以通过潜油机器人的实时收集的坐标数据在线更新鲁棒卡尔曼滤波的参数,保证潜油机器人的定位精度。
技术特征:
1.一种基于鲁棒卡尔曼滤波的潜油机器人定位方法,其特征在于,包括如下步骤:
2.如权利要求1所述的一种基于鲁棒卡尔曼滤波的潜油机器人定位方法,其特征在于,所述潜油机器人在储罐内的坐标数据样本集获取的方法为:
3.如权利要求1所述的一种基于鲁棒卡尔曼滤波的潜油机器人定位方法,其特征在于,鲁棒卡尔曼滤波算法模型的结构的确定方法为:
4.如权利要求1所述的一种基于鲁棒卡尔曼滤波的潜油机器人定位方法,其特征在于,获取潜油机器人在储罐内的坐标数据样本集和控制输入后,对坐标数据样本集和控制输入进行无量纲化处理,将数据集的方差转换为单位方差。
5.如权利要求1所述的一种基于鲁棒卡尔曼滤波的潜油机器人定位方法,其特征在于,所述e步学习模型隐变量的后验分布期望,具体包括:
6.如权利要求1所述的一种基于鲁棒卡尔曼滤波的潜油机器人定位方法,其特征在于,鲁棒卡尔曼滤波算法的模型参数的参数包括:状态转换矩阵、输出矩阵、真实值和观测值的精度矩阵和学生t分布的自由度。
7.如权利要求1所述的一种基于鲁棒卡尔曼滤波的潜油机器人定位方法,其特征在于,在m步更新模型的参数的方法为:通过对似然函数的后验分布求导,并令求导结果等于零,得到对应的参数更新公式进行更新。
8.如权利要求1所述的一种基于鲁棒卡尔曼滤波的潜油机器人定位方法,其特征在于,将观测数据的似然函数作为参数学习过程中迭代收敛的判定条件。
9.如权利要求1所述的一种基于鲁棒卡尔曼滤波的潜油机器人定位方法,其特征在于,基于训练后的鲁棒卡尔曼滤波算法对新的坐标数据进行预测,包括:
10.一种基于鲁棒卡尔曼滤波的潜油机器人定位系统,其特征在于,包括:
技术总结
本发明属于机器人定位领域,提供了一种基于鲁棒卡尔曼滤波的潜油机器人定位方法及系统,首先针对潜油机器人坐标数据存在离群点的问题,提出了一种鲁棒卡尔曼滤波算法用于潜油机器人在原油储罐内的定位,其次,针对潜油机器人工作环境变化导致算法参数改变的问题,提出了一种基于机器学习参数在线更新方法,通过对包含离群点污染的潜油机器人定位数据进行信息挖掘,获得潜油机器人定位所需的参数,而且可以在潜油机器人工作时利用在线数据对卡尔曼滤波算法的参数进行实时更新和校正,进而提高潜油机器人作业时定位精度,保证工作质量。
技术研发人员:邵伟明,赵东亚,张舒展,韩文学
受保护的技术使用者:中国石油大学(华东)
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!