一种动力输出轴系无相位现场动平衡方法与流程
本发明属于动力驱动装置现场动平衡,具体涉及一种动力输出轴系无相位现场动平衡方法。
背景技术:
1、动力驱动装置包括蒸汽轮机、燃气轮机及柴油机等装置,它的功能是给负载提供机械能,用于驱动船舶螺旋桨、发电机、压缩机和水力测功器等耗功设备。
2、动力驱动装置动力输出轴系在加工、制造和装配等过程中,因材料特性不一致、加工、装配误差,会导致转子存在质量不平衡。当转子旋转时,不平衡质量产生离心扰动力,扰动力通过轴承传递到壳体和基座上,产生振动,降低了设备使用寿命。对于动力输出轴系而言,过大的不平衡还会引起动力驱动装置内部部件和轴承所受载荷的增加,甚至会导致动力驱动装置内部部件和轴承损坏,进而影响设备的安全运行。
技术实现思路
1、本发明的目的在于提供一种动力输出轴系无相位现场动平衡方法,可基于任何振动测试设备获取的振动数据进行现场动平衡,无需使用键相传感器,可以适配各厂家、各种型号的动力驱动装置。
2、一种动力输出轴系无相位现场动平衡方法,包括以下步骤:
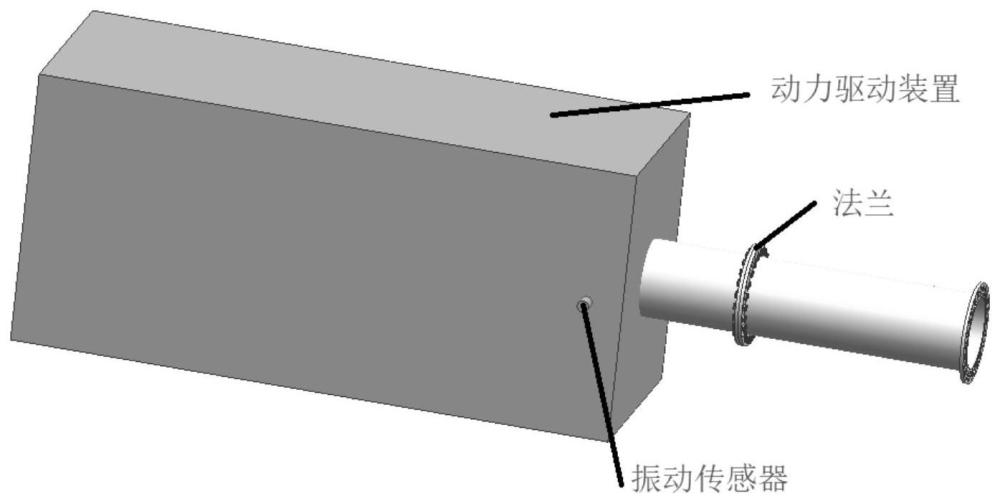
3、s1,在动力驱动装置壳体上布置振动传感器,给动力输出轴系法兰上的螺栓编号,编号数沿着转速相反方向递增,依次从1~n,设定1号螺栓位置为相位零点,其他螺栓位置相位计算公式为:
4、ηsi=(ni-1)*360/n
5、s2,启动动力驱动装置,从慢车缓慢升到额定功率,测得动力驱动装置壳体振动速度的伯德图,取振动峰值时刻振动速度平均值αl1,停机;
6、s3,在动力输出轴系法兰1号螺栓上新增试重1;
7、s4,启动动力驱动装置,重复s2,测得同s2相同转速和功率的振动幅值αl2,停机;
8、s5,去除动力输出轴系法兰试重1,在动力输出轴系法兰螺栓上新增试重2;
9、s6,启动动力驱动装置,重复s2,测得同s2相同转速和功率的振动幅值αl3,停机;
10、s7,计算动力输出轴系配重质量及相位;
11、s8,使用公式得出动力输出轴系法兰配重螺栓编号和质量,计算得出配重均分配到两个相邻螺栓上,如最终校正重量超过50g,按照50g增加配重,相位不变;
12、s9,如果振动值降到要求范围内试验结束,否则重复s3~s8,直至振动速度值降到要求范围内。
13、进一步地,所述s3中如果计算得出试重质量过大而无法在1号螺栓安装,可以在1、2号螺栓上安装双联锁片或者长螺栓作为试重,利用公式得出新增试重的重量和相位,试重质量计算公式:
14、msj=9549mg/r×n
15、其中,m为转子质量,g为精度等级选用,r为校正半径,n为工件的工作转速,msj为计算试重质量。
16、进一步地,所述s2中振动峰值时刻稳定运行不少于10分钟,取最后5~10分钟振动平均值,且每次启机运行时间相同。
17、进一步地,所述s5中试重2与试重1角度不小于30度,试重1与试重2质量也可不同,但相差不超过50%。
18、本发明的有益效果在于:本发明可基于任何设备测试得到的振动幅值信息,利用动力输出轴系法兰螺栓即可实现离线现场动平衡,该方法节省成本,无需布置键相传感器,通常利用机带振动传感器的信息就可以实现离线现场动平衡,具有振动幅值信息选取灵活、方法简单、操作方便的特点。
技术特征:
1.一种动力输出轴系无相位现场动平衡方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种动力输出轴系无相位现场动平衡方法,其特征在于,所述s3中如果计算得出试重质量过大而无法在1号螺栓安装,可以在1、2号螺栓上安装双联锁片或者长螺栓作为试重,利用公式得出新增试重的重量和相位,试重质量计算公式:
3.根据权利要求1所述的一种动力输出轴系无相位现场动平衡方法,其特征在于,所述s2中振动峰值时刻稳定运行不少于10分钟,取最后5~10分钟振动平均值,且每次启机运行时间相同。
4.根据权利要求1所述的一种动力输出轴系无相位现场动平衡方法,其特征在于,所述s5中试重2与试重1角度不小于30度,试重1与试重2质量也可不同,但相差不超过50%。
技术总结
本发明提供一种动力输出轴系无相位现场动平衡方法,包括以下步骤:1)布置振动传感器;2)启动动力驱动装置,从慢车缓慢升到额定功率,测得动力驱动装置壳体振动峰值时刻的振动幅值αL1;3)在动力输出轴系法兰螺栓上新增试重1;4)重复步骤2,测得同步骤2相同转速和功率的振动幅值αL2;5)去除动力输出轴系法兰试重1,在动力输出轴系法兰螺栓上新增试重2,试重2与试重1角度不小于30度;6)重复步骤2),测得同步骤2)相同转速和功率的振动幅值αL3;7)计算动力输出轴系配重质量及相位;8)得出动力输出轴系法兰配重螺栓编号和质量。本发明无需键相传感器即可实现离线转子现场动平衡,具有振动幅值信息选取灵活、操作简单的特点。
技术研发人员:孙丹,刘洪达,林枫,张家源,孙景国,李剑钊
受保护的技术使用者:中国船舶集团有限公司第七〇三研究所
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!