导线点云的弧垂测量方法与流程
本发明涉及输电线路运维,特别涉及一种导线点云的弧垂测量方法。
背景技术:
1、在输电线路运维过程中,导线的弧垂是线路安全运行的重要指标。导线的运行负荷和周围环境的变化,都会造成弧垂的变化。弧垂过大或过小,都会影响导线的安全运行;弧垂过大时,不能保证导线下方的安全距离,可能造成跳闸和停运事故;弧垂过小时,导线受力过大,可能造成倒塔和断线事故。因此,需要定期测量弧垂,并保证其处于安全范围内。
2、现有技术中,架空输电导线(即架空线)的弧垂测量方法主要有:测量应力计算弧垂、通过经纬仪观测弧垂和借助图像处理估算弧垂等;而除图像采集外,这些方法通常不采集导线的完整结构,致使弧垂测量不够直观,不便于操作记录。而激光雷达可采集输电导线的导线点云,重构导线的完整结构;因此,如何能够利用导线点云,快速、准确且直观地测量弧垂,是现今急需解决的问题。
技术实现思路
1、本发明的目的是提供一种导线点云的弧垂测量方法、装置及设备,以利用激光雷达采集的导线点云,快速、准确且直观地测量弧垂,提升用户体验。
2、为解决上述技术问题,本发明提供一种导线点云的弧垂测量方法,包括:
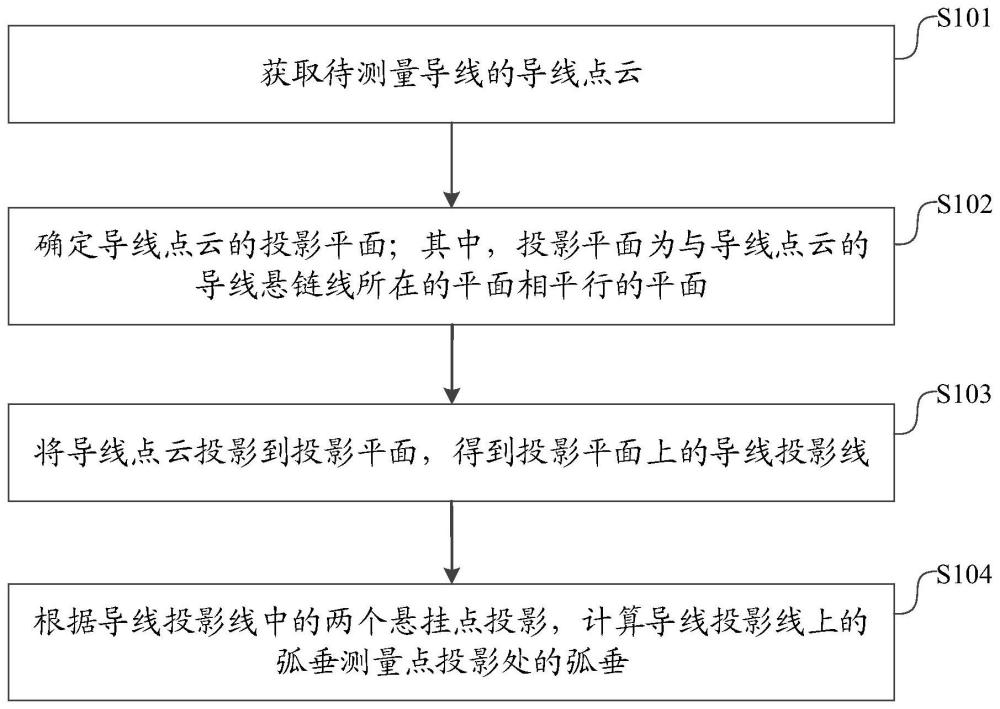
3、获取待测量导线的导线点云;
4、确定所述导线点云的投影平面;其中,所述投影平面为与所述导线点云的导线悬链线所在的平面相平行的平面;
5、将所述导线点云投影到所述投影平面,得到所述投影平面上的导线投影线;
6、根据所述导线投影线中的两个悬挂点投影,计算所述导线投影线上的弧垂测量点投影处的弧垂。
7、在一些实施例中,所述确定所述导线点云的投影平面,包括:
8、通过矩阵奇异值分解,确定所述投影平面。
9、在一些实施例中,所述通过矩阵奇异值分解,确定所述投影平面,包括:
10、将所述导线点云表示为矩阵,得到导线点云矩阵
11、对所述导线点云矩阵进行中心化,得到中心化矩阵;
12、对所述中心化矩阵进行奇异值分解,确定所述投影平面;其中,所述投影平面由所述中心化矩阵的奇异值分解结果中奇异值最大和奇异值第二大的奇异向量确定。
13、在一些实施例中,所述根据所述导线投影线中的两个悬挂点投影,计算所述导线投影线上的弧垂测量点投影处的弧垂,包括:
14、确定所述投影平面上目标二维坐标系;其中,所述目标二维坐标系的一个坐标轴与弧垂测量点处的弧垂线在所述投影平面上的投影平行;
15、确定所述目标二维坐标系中两个所述悬挂点投影各自的悬挂点坐标;
16、确定所述目标二维坐标系中所述弧垂测量点投影的测量点坐标;
17、根据所述悬挂点坐标和所述测量点坐标,计算所述弧垂测量点投影处的弧垂。
18、在一些实施例中,所述确定所述投影平面上目标二维坐标系,包括:
19、根据所述导线点云的两个悬挂点和所述弧垂测量点,确定所述弧垂测量点处的弧垂线与悬挂点连线的交点;
20、根据所述弧垂测量点投影和所述交点在所述投影平面上的投影,确定所述弧垂测量点处的弧垂线在所述投影平面上的投影;
21、根据所述弧垂测量点处的弧垂线在所述投影平面上的投影,确定所述目标二维坐标系。
22、在一些实施例中,所述根据所述弧垂测量点投影和所述交点在所述投影平面上的投影,确定所述弧垂测量点处的弧垂线在所述投影平面上的投影,包括:
23、通过确定所述弧垂测量点处的弧垂线在所述投影平面上的投影;其中,为所述弧垂测量点p3在所述投影平面上的投影,为所述交点p′3在所述投影平面上的投影,a=[va vb],va和vb为所述投影平面上的两个正交的单位向量。
24、在一些实施例中,所述根据所述悬挂点坐标和所述测量点坐标,计算所述弧垂测量点投影处的弧垂,包括:
25、通过计算所述弧垂测量点投影处的弧垂;其中,所述目标二维坐标系中两个所述悬挂点投影各自的悬挂点坐标分别为和所述测量点坐标为
26、在一些实施例中,所述确定所述目标二维坐标系中所述弧垂测量点投影的测量点坐标,包括:
27、获取所述导线投影线上所述弧垂测量点投影的选择横坐标值;其中,所述选择横坐标值在预设区间内,所述预设区间为
28、若所述弧垂测量点投影为目标投影点,则将所述目标二维坐标系中所述目标投影点的坐标确定为所述测量点坐标;其中,所述目标投影点为所述导线投影线上所述导线点云的投影点中横坐标与所述选择横坐标值相同的投影点;
29、若所述弧垂测量点投影不为目标投影点,则根据所述弧垂测量点投影的邻域内投影点的纵坐标,确定所述测量点坐标的纵坐标,并将所述选择横坐标值确定为所述测量点坐标的横坐标。
30、本发明还提供了一种导线点云的弧垂测量装置,包括:
31、获取模块,获取待测量导线的导线点云;
32、确定模块,用于确定所述导线点云的投影平面;其中,所述投影平面为与所述导线点云的导线悬链线所在的平面相平行的平面;
33、投影模块,用于将所述导线点云投影到所述投影平面,得到所述投影平面上的导线投影线;
34、计算模块,用于根据所述导线投影线中的两个悬挂点投影,计算所述导线投影线上的弧垂测量点投影处的弧垂。
35、本发明还提供了一种导线点云的弧垂测量设备,包括:
36、存储器,用于存储计算机程序;
37、处理器件,用于执行所述计算机程序时实现如上述所述的导线点云的弧垂测量方法的步骤。
38、本发明所提供的一种导线点云的弧垂测量方法,包括:获取待测量导线的导线点云;确定导线点云的投影平面;其中,投影平面为与导线点云的导线悬链线所在的平面相平行的平面;将导线点云投影到投影平面,得到投影平面上的导线投影线;根据导线投影线中的两个悬挂点投影,计算导线投影线上的弧垂测量点投影处的弧垂;
39、可见,本发明通过将导线点云投影到投影平面,能够减小导线点云采集误差和风偏等因素对导线弧垂的测量精度的影响,而且能够为用户观测导线弧垂提供良好的视角;并且将导线点云投影到投影平面再计算弧垂,能够提高计算效率,并且由于导线点云可采集完整的输电导线结构,从而能够便捷地计算导线上任意点的弧垂,提升了用户体验。此外,本发明还提供了一种导线点云的弧垂测量装置及设备,同样具有上述有益效果。
技术特征:
1.一种导线点云的弧垂测量方法,其特征在于,包括:
2.根据权利要求1所述的导线点云的弧垂测量方法,其特征在于,所述确定所述导线点云的投影平面,包括:
3.根据权利要求2所述的导线点云的弧垂测量方法,其特征在于,所述通过矩阵奇异值分解,确定所述投影平面,包括:
4.根据权利要求1至3任一项所述的导线点云的弧垂测量方法,其特征在于,所述根据所述导线投影线中的两个悬挂点投影,计算所述导线投影线上的弧垂测量点投影处的弧垂,包括:
5.根据权利要求4所述的导线点云的弧垂测量方法,其特征在于,所述确定所述投影平面上目标二维坐标系,包括:
6.根据权利要求5所述的导线点云的弧垂测量方法,其特征在于,所述根据所述弧垂测量点投影和所述交点在所述投影平面上的投影,确定所述弧垂测量点处的弧垂线在所述投影平面上的投影,包括:
7.根据权利要求4所述的导线点云的弧垂测量方法,其特征在于,所述根据所述悬挂点坐标和所述测量点坐标,计算所述弧垂测量点投影处的弧垂,包括:
8.根据权利要求7所述的导线点云的弧垂测量方法,其特征在于,所述确定所述目标二维坐标系中所述弧垂测量点投影的测量点坐标,包括:
9.一种导线点云的弧垂测量装置,其特征在于,包括:
10.一种导线点云的弧垂测量设备,其特征在于,包括:
技术总结
本发明公开了一种导线弧垂测量方法,涉及输电线路运维技术领域,包括:获取待测量导线的导线点云;确定导线点云的投影平面;其中,投影平面为与导线点云的导线悬链线所在的平面相平行的平面;将导线点云投影到投影平面,得到投影平面上的导线投影线;根据导线投影线中的两个悬挂点投影,计算导线投影线上的弧垂测量点投影处的弧垂;本发明通过将导线点云投影到投影平面,能够减小导线点云采集误差和风偏等因素对导线弧垂的测量精度的影响,而且能够为用户观测导线弧垂提供良好的视角;并且将导线点云投影到投影平面再计算弧垂,能够提高计算效率,并且由于导线点云可采集完整的输电导线结构,从而能够便捷地计算导线上任意点的弧垂。
技术研发人员:钮益峰,钱基业,梁云,张志峰,邵先军,王少华,李特,包健康,况彭燕,王振国
受保护的技术使用者:国网重庆市电力公司电力科学研究院
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!