一种基于类Luenberger观测器的RLC分数线性电路的故障估计方法
本发明涉及电力电子,具体涉及一种基于类luenberger观测器的rlc分数线性电路的故障估计方法。
背景技术:
1、随着工业系统在应用和研究领域对安全性和可靠性要求的不断提高,故障诊断技术在近几十年得到了广泛的关注。故障估计是故障诊断方法的重要组成部分,它不仅可以判断故障发生的时间和地点,而且可以提供故障的大小和形状,对在线容错控制和实时检测至关重要。在基于模型的故障估计方法中,基于观测器的方法已被证明是一种有效的方法,并得到了广泛的研究。故障估计可以通过使用各种观测器技术来实现,例如自适应观测器、滑模观测器、pi观测器和增广系统观测器。
2、随着近几年分数阶系统的兴起,有关故障检测故障估计的研究层出不穷,但当系统中的传感器存在非线性这一特征时,相关的研究较为缺乏,基于以上的讨论,本文讨论了具有执行器故障的分数阶系统的故障估计观测器设计问题,并在传感器中加入了非线性项,设计的故障估计观测器使得非线性分数阶系统渐进稳定,且具有h∞性能,同时完成故障估计。
技术实现思路
1、发明目的:针对目前现有技术中存在的问题,本发明提供了一种基于类luenberger观测器的rlc分数线性电路的故障估计方法,针对存在分数阶、非线性、不确定性、干扰和故障情况,利用观测器的方法,使得系统的估计动态误差系统渐进稳定;并利用lyapunov函数和线性矩阵不等式,得到故障估计观测器存在的充分条件,使得系统全局渐进稳定且具有h∞性能,能在线准确的实现故障估计,实现rlc分数线性电路的故障估计。
2、技术方案:本发明提供了一种基于类luenberger观测器的rlc分数线性电路的故障估计方法,包括如下步骤:
3、步骤1:利用基尔霍夫电流定律(kcl)和基尔霍夫电压定律(kvl),建立了rlc分数电路的数学模型,并通过构造增广矩阵,将微分方程转化为标准形式的rlc分数线性电路系统模型的状态方程;
4、步骤2:基于步骤1中得到的状态方程,给出所述分数阶线性电路系统模型含有不确定性、非线性、干扰和故障时的一般系统模型;
5、步骤3:提出使用类luenberger观测器作为信号发生器,给出相应的动态估计误差系统;所述类luenberger观测器为针对所述步骤2中的分数阶线性电路系统模型设计的类luenberger观测器,所述观测器系统为:
6、
7、其中,分别表示状态估计状态、估计输出状态、故障估计信号,其中和是已知的常数矩阵,f是一个未知矩阵且满足ft(t)f(t)≤i,是需要设计的观测器的增益;
8、定义:
9、
10、所述动态估计误差系统为:
11、
12、其中:
13、
14、步骤4:针对步骤3中得到的动态误差系统,通过李亚普诺夫函数,给出确保系统指数稳定的充分条件,将步骤4所述的充分条件转化为线性矩阵不等式,得出类luenberger观测器中需要设计的参数;
15、步骤5:根据步骤4设计的故障观测器,设计常数故障和时变故障,实现rlc分数线性电路的故障估计。
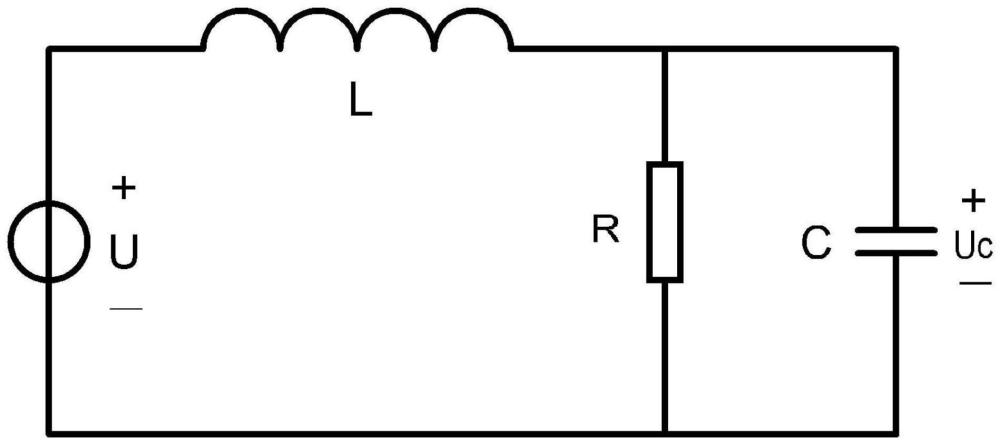
16、进一步地,所述rlc分数电路由电阻、电容、线圈和电压源组成,基于基尔霍夫电流定律(kcl)和基尔霍夫电压定律(kvl),得到了rlc分数线性电路的数学模型:
17、
18、其中,流经线圈、电阻和电感的电流(规定电路方向为顺时针方向)分别用il,ir和ic表示,流经线圈、电阻和电感两端的电压分别用ul,ur和uc表示,l表示电感,c表示电容,r表示负载电阻;
19、因为其中0<α,β<1,则:
20、
21、其中,uc(t)、il(t)是状态变量,u(t)是控制输入,若定义则可得rlc分数线性电路系统模型的状态方程如下:
22、
23、式中,
24、
25、进一步地,所述步骤2中的一般系统模型为:
26、
27、其中,0<α<1,分别表示状态向量、系统输出、控制输入、故障和外部干扰信号,a,b,c,d,g,e为已知的具有适当维数的常数矩阵;φ(x(t),u(t))为具有lipschitz常数η的非线性向量函数,η>0,即:
28、
29、进一步地,所述步骤4中系统渐进稳定的充分条件:
30、所述动态误差系统在存在常数故障的状态下指数稳定且满足h∞性能,对于给定正标量ε1,ε2以及η,如果存在矩阵满足
31、
32、gtp=fc且故障估计自适应律为∑是学习率,满足
33、其中,γ11=atp+pa-ctx1t-x1c+ε1η2i,γ12=[p ct -pe pm ct nt],当正定对称矩阵p,矩阵x和f满足上式时,动态估计误差系统渐进稳定且具有h∞性能γ;在这种情况下,观测器增益为l=p-1x1;
34、所述动态误差系统在存在时变故障以及δl(t)=0的状态下指数稳定且满足h∞性能,对于给定正标量ε1,ε3以及η,如果存在矩阵满足
35、
36、
37、且故障估计自适应律为∑是学习率,满足其中,
38、γ22=diag{-ε4in,-gtqg,-γ2im,-ε1in,-im},当正定对称矩阵p,矩阵x2和f满足上式时,动态估计误差系统渐进稳定且具有h∞性能γ,在这种情况下,观测器增益为l=p-1x2。
39、进一步地,所述步骤5中的常数故障为:
40、
41、所述时变故障为:
42、
43、有益效果:
44、1.本发明提出了一种新颖的针对rlc分数线性电路的故障估计方法,能在线准确的完成故障估计,满足系统渐进稳定,且满足h∞性能,保证了系统的鲁棒性。
45、2.本研究针对系统一般模型中可能存在的执行器故障和传感器中的非线性项,利用观测器方法,实现系统在无扰动、有故障情况下的估计动态误差系统,实现了系统的渐进稳定。该方法应用于rlc分数线性电路的故障估计,具有较高创新性。
技术特征:
1.一种基于类luenberger观测器的rlc分数线性电路的故障估计方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于类luenberger观测器的rlc分数线性电路的故障估计方法,其特征在于,所述rlc分数电路由电阻、电容、线圈和电压源组成,基于基尔霍夫电流定律(kcl)和基尔霍夫电压定律(kvl),得到了rlc分数线性电路的数学模型:
3.根据权利要求1所述的基于类luenberger观测器的rlc分数线性电路的故障估计方法,其特征在于,所述步骤2中的一般系统模型为:
4.根据权利要求1所述的基于类luenberger观测器的rlc分数线性电路的故障估计方法,其特征在于,所述步骤4中系统渐进稳定的充分条件:
5.根据权利要求1所述的基于类luenberger观测器的rlc分数线性电路的故障估计方法,其特征在于,所述步骤5中的常数故障为:
技术总结
本发明涉及故障诊断技术领域,公开了一种基于类Luenberger观测器的RLC电路故障估计方法。根据基尔霍夫电流定律(KCL)和基尔霍夫电压定律(KVL),建立了RLC分数电路的数学模型,综合考虑了分数阶、非线性、非脆弱、干扰以及故障情况,给出系统状态方程的通用表达式。设计类Luenberger观测器,确定了误差动态方程以及达到故障估计目标所需的性能指标。针对系统的全局渐进稳定,给出了充分条件,并将其转化为线性矩阵不等式,以确定观测器的参数,从而成功实现了故障估计任务。该故障估计方法设计独特,对扰动表现出较强的鲁棒性,能有效实施对RLC分数阶电路的故障估计。
技术研发人员:孙申楠,杜董生,宋容榕,王梦姣,朱凌宇
受保护的技术使用者:淮阴工学院
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!