基于量子蚁群算法采用量子聚类的机器人路径规划方法与流程
本发明涉及机器人路径规划,具体涉及基于量子蚁群算法采用量子聚类的机器人路径规划方法。
背景技术:
1、在自主机器人路径规划中,蚁群算法可以用于优化机器人的运动路径,减少行驶时间。随着技术的不断发展,量子蚁群算法也被引入到自主机器人路径规划中。量子蚁群算法是一种结合传统蚁群算法和量子计算方法各自优点的算法,量子蚁群算法在提出后得到了广泛关注,并在之后从经典-量子混合、量子启发到全量子计算等多个角度通过量子计算对蚁群算法进行了改进。
2、由于量子计算的引入,使得自主机器人路径规划中传统蚁群算法的一些固有缺陷得到了显著的改善,例如量子电路产生的随机数相比于经典计算机是真随机数,有效改善了传统蚁群算法容易陷入局部最优解的缺陷。尽管如此,目前已有的量子蚁群算法也存在一定的局限性,其最明显的一个缺陷就是,由于量子比特数量的限制,使得量子蚁群算法的应用范围受到了很大限制,仅能应用在小规模路径规划问题中。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术所存在的上述缺点,本发明提供了基于量子蚁群算法采用量子聚类的机器人路径规划方法,能够有效克服现有技术所存在的无法应用于大规模路径规划问题的缺陷。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
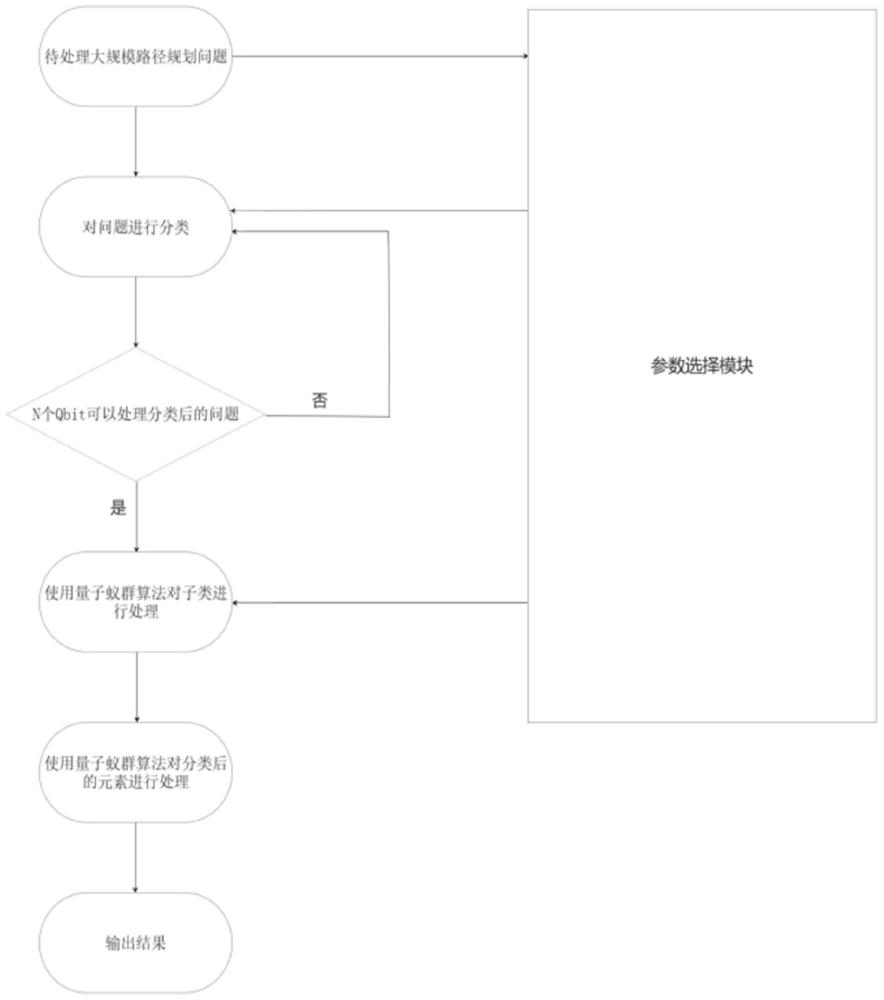
5、基于量子蚁群算法采用量子聚类的机器人路径规划方法,将大规模路径规划问题分解为小规模路径规划问题;
6、判断当前可用的量子比特数量是否可以处理分解得到的小规模路径规划问题,若分解得到的小规模路径规划问题仍然超过当前可用计算资源,则对小规模路径规划问题进行进一步分解,直至当前可用计算资源可以处理为止;
7、若当前可用计算资源可以处理分解得到的小规模路径规划问题,则采用量子蚁群算法对各小规模路径规划问题进行求解;
8、合并所有小规模路径规划问题的求解结果,得到大规模路径规划问题的最优解。
9、优选地,具体包括以下步骤:
10、s1、采用量子k-means聚类算法对所有路径标识点进行聚类得到初代子群,将大规模路径规划问题分解为小规模路径规划问题;
11、s2、判断路径遍历求解量子电路中的量子比特数量是否可以处理分解得到的小规模路径规划问题,若不可以处理则采用量子k-means聚类算法对初代子群进行进一步聚类,直至可以处理,否则利用路径遍历求解量子电路对末代子群进行路径计算;
12、s3、基于s2中得到的末代子群顺序,对各末代子群中的上一代子群赋予起点和终点,将随机起点和终点的路径规划问题转换为起点和终端确定的路径规划问题;
13、s4、利用路径遍历求解量子电路对各末代子群中的上一代子群进行路径计算;
14、s5、判断全部路径是否覆盖所有路径标识点,若没有覆盖则利用路径遍历求解量子电路对各当前代子群中的上一代子群继续进行路径计算,直至全部路径覆盖所有路径标识点,否则合并各代子群及各初代子群中路径标识点的路径计算结果,得到最优路径。
15、优选地,s1中采用量子k-means聚类算法对所有路径标识点进行聚类得到初代子群,将大规模路径规划问题分解为小规模路径规划问题,包括:
16、对于所有路径标识点,利用幅值嵌入传统数据的量子电路将传统数据嵌入量子比特位中进行距离计算,并使用ibm量子计算脚本qiskit中的初始化特性。
17、优选地,s2中判断路径遍历求解量子电路中的量子比特数量是否可以处理分解得到的小规模路径规划问题,包括:
18、若当前代子群数量大于2个相邻量子比特位所能代表的十进制数的个数,则判断不可以处理,否则判断可以处理;
19、其中,两个相邻量子比特位所能代表的十进制数的个数为4。
20、优选地,所述路径遍历求解量子电路包括q10~q17代表的8个量子比特位、辅助反转位q0和ry量子门;
21、量子比特位,通过2个相邻量子比特位代表的十进制数对路径标识点及各代子群进行编码;
22、辅助反转位q0,用于使路径遍历求解量子电路产生的问题解发生突变,降低量子蚁群算法陷入局部最优解的可能;
23、ry量子门,用于对各量子比特位设置权重,相当于传统蚁群算法中产生指导蚂蚁对路径进行搜索的信息素。
24、优选地,在利用所述路径遍历求解量子电路进行路径计算的过程中,若路径遍历求解量子电路产生的问题解在预设时间段内没有改变,则利用辅助反转位q0使得路径遍历求解量子电路产生随机解,以降低量子蚁群算法陷入局部最优解的可能。
25、优选地,在利用所述路径遍历求解量子电路进行路径计算时,利用量子hammingdistance电路对不符合路径规划规则的问题解进行修正,从而快速产生合理的问题解,提高在路径搜索初期信息素更新的效率。
26、优选地,所述量子hammingdistance电路中的rx用于存储二进制x变量,rv用于存储二进制v变量,rd用于存储hammingdistance运算结果,rij代表第i个二进制变量vi与第j个二进制变量xj之间hammingdistance的比较结果。
27、优选地,所述ry量子门的数学表达式如下:
28、
29、其中,θ代表ry量子门的转动角度,对θ进行相应赋值即可改变路径遍历求解量子电路产生路径的权重,实现传统蚁群算法中信息素更新的功能。
30、(三)有益效果
31、与现有技术相比,本发明所提供的基于量子蚁群算法采用量子聚类的机器人路径规划方法,具有以下有益效果:
32、1)引入了量子k-means聚类算法,实现了对自主机器人路径规划中量子蚁群算法的改进,有效解除了量子比特数量对于量子蚁群算法的限制,使得量子蚁群算法能够有效应用于大规模路径规划问题中;
33、2)通过量子计算对k-means聚类算法进行改进,能够加快对数据进行聚类的速度;
34、3)通过量子计算对hammingdistance算法进行改进,能够加快不合理的问题解转变为符合路径规划规则的合理的问题解的过程。
技术特征:
1.基于量子蚁群算法采用量子聚类的机器人路径规划方法,其特征在于:将大规模路径规划问题分解为小规模路径规划问题;
2.根据权利要求1所述的基于量子蚁群算法采用量子聚类的机器人路径规划方法,其特征在于:具体包括以下步骤:
3.根据权利要求1所述的基于量子蚁群算法采用量子聚类的机器人路径规划方法,其特征在于:s1中采用量子k-means聚类算法对所有路径标识点进行聚类得到初代子群,将大规模路径规划问题分解为小规模路径规划问题,包括:
4.根据权利要求3所述的基于量子蚁群算法采用量子聚类的机器人路径规划方法,其特征在于:s2中判断路径遍历求解量子电路中的量子比特数量是否可以处理分解得到的小规模路径规划问题,包括:
5.根据权利要求1所述的基于量子蚁群算法采用量子聚类的机器人路径规划方法,其特征在于:所述路径遍历求解量子电路包括q10~q17代表的8个量子比特位、辅助反转位q0和ry量子门;
6.根据权利要求5所述的基于量子蚁群算法采用量子聚类的机器人路径规划方法,其特征在于:在利用所述路径遍历求解量子电路进行路径计算的过程中,若路径遍历求解量子电路产生的问题解在预设时间段内没有改变,则利用辅助反转位q0使得路径遍历求解量子电路产生随机解,以降低量子蚁群算法陷入局部最优解的可能。
7.根据权利要求5所述的基于量子蚁群算法采用量子聚类的机器人路径规划方法,其特征在于:在利用所述路径遍历求解量子电路进行路径计算时,利用量子hammingdistance电路对不符合路径规划规则的问题解进行修正,从而快速产生合理的问题解,提高在路径搜索初期信息素更新的效率。
8.根据权利要求7所述的基于量子蚁群算法采用量子聚类的机器人路径规划方法,其特征在于:所述量子hamming distance电路中的rx用于存储二进制x变量,rv用于存储二进制v变量,rd用于存储hamming distance运算结果,rij代表第i个二进制变量vi与第j个二进制变量xj之间hamming distance的比较结果。
9.根据权利要求5所述的基于量子蚁群算法采用量子聚类的机器人路径规划方法,其特征在于:所述ry量子门的数学表达式如下:
技术总结
本发明涉及机器人路径规划,具体涉及基于量子蚁群算法采用量子聚类的机器人路径规划方法,将大规模路径规划问题分解为小规模路径规划问题;判断当前可用的量子比特数量是否可以处理分解得到的小规模路径规划问题,若分解得到的小规模路径规划问题仍然超过当前可用计算资源,则对小规模路径规划问题进行进一步分解,直至当前可用计算资源可以处理为止;若当前可用计算资源可以处理分解得到的小规模路径规划问题,则采用量子蚁群算法对各小规模路径规划问题进行求解;合并所有小规模路径规划问题的求解结果,得到大规模路径规划问题的最优解;本发明提供的技术方案能够有效克服现有技术所存在的无法应用于大规模路径规划问题的缺陷。
技术研发人员:邱骞,徐华,李小刚,孙祺纯
受保护的技术使用者:合肥弈维量子科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!