移动机器人的控制系统、方法、装置及存储介质与流程
本发明涉及机器人领域,尤其涉及一种移动机器人的控制系统、方法、装置及存储介质。
背景技术:
1、随着激光技术的发展和应用,机器人领域逐渐重视激光传感器在障碍物检测方向上的应用。移动机器人上通常采用相机和至少一个线激光发射器共同构成激光传感器,相机接收环境光和障碍物反射的线激光生成图像,移动机器人可根据图像中的激光信息对障碍物进行距离检测。
2、但是,当相机接收的光线过多或过少时,生成的图像质量差,图像中的激光信息不够突出,障碍物检测准确性不高。
技术实现思路
1、本发明的主要目的在于提供一种移动机器人的控制系统、方法、装置及存储介质,用于解决图像质量差时激光信息不突出的问题,提高检测准确性。
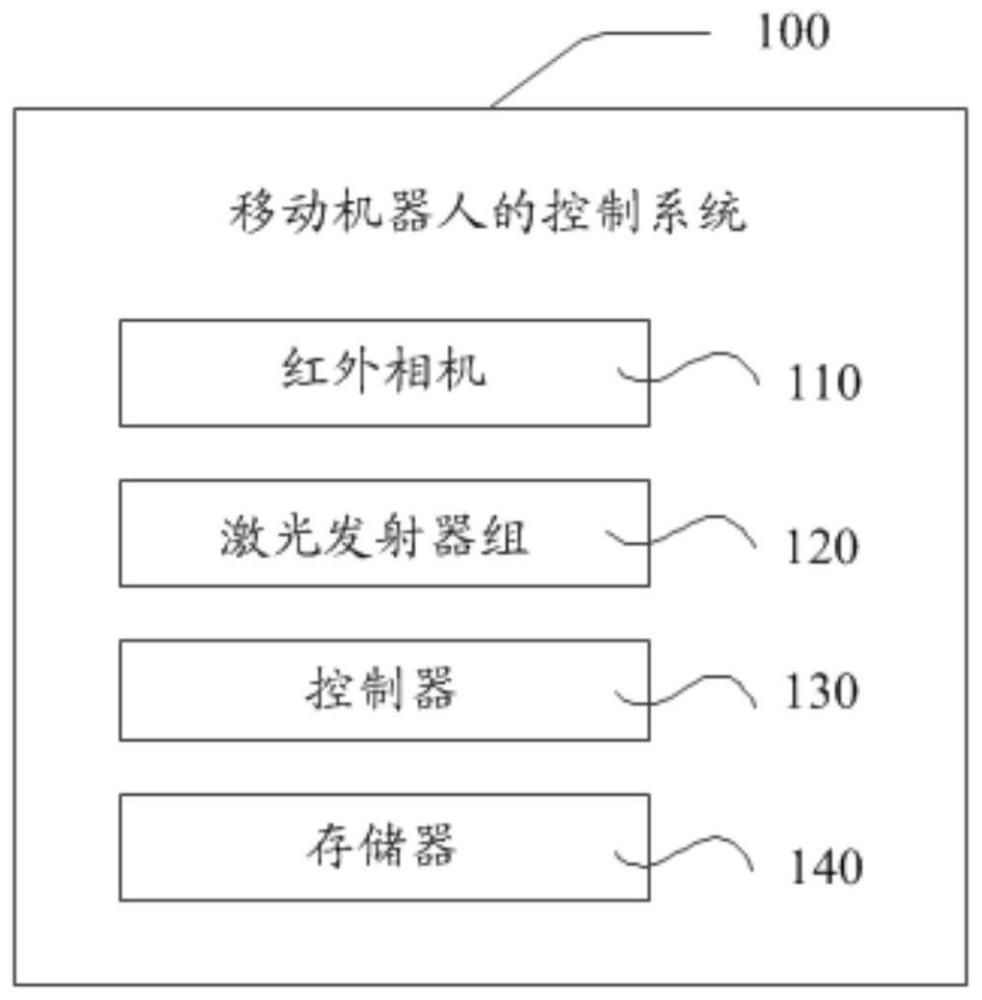
2、本发明第一方面提供了一种移动机器人的控制系统,所述移动机器人的控制系统包括:激光发射器组、红外相机和控制器,所述激光发射器组用于发射十字型激光;所述红外相机用于拍摄图像;所述控制器用于控制所述激光发射器组以预设频率发射十字型激光,在一个预设周期内,当所述激光发射器组未发射十字型激光时,通过所述红外相机进行拍摄,得到第一图像,当所述激光发射器组发射十字型激光时,通过所述红外相机进行拍摄,得到第二图像,所述预设周期与所述预设频率对应,将所述第一图像与所述第二图像进行像素差值处理,得到差异图像,所述差异图像可用于计算曝光时长和三维坐标。
3、本发明第二方面提供了一种移动机器人的控制方法,应用于移动机器人的控制系统,所述移动机器人的控制系统包括激光发射器组、红外相机和控制器,所述移动机器人的控制方法包括:通过所述激光发射器组以预设频率发射十字型激光;在一个预设周期内,当所述激光发射器组未发射十字型激光时,通过所述红外相机进行拍摄,得到第一图像,当所述激光发射器组发射十字型激光时,通过所述红外相机进行拍摄,得到第二图像,所述预设周期与所述预设频率对应;所述控制器将所述第一图像与所述第二图像进行像素差值处理,得到差异图像。
4、本发明第三方面提供了一种移动机器人的控制装置,包括:发射模块,用于通过所述激光发射器组以预设频率发射十字型激光;拍摄模块,用于在一个预设周期内,当所述激光发射器组未发射十字型激光时,通过所述红外相机进行拍摄,得到第一图像,当所述激光发射器组发射十字型激光时,通过所述红外相机进行拍摄,得到第二图像,所述预设周期与所述预设频率对应;处理模块,用于所述控制器将所述第一图像与所述第二图像进行像素差值处理,得到差异图像。
5、本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述的移动机器人的控制方法。
6、本发明提供的技术方案中,移动机器人上设置移动机器人的控制系统,移动机器人的控制系统包括激光发射器组、红外相机和控制器,所述激光发射器组用于发射十字型激光,所述红外相机用于拍摄图像,所述控制器用于控制所述激光发射器组以预设频率发射十字型激光,在一个预设周期内,当所述激光发射器组未发射十字型激光时,通过所述红外相机进行拍摄,得到第一图像,当所述激光发射器组发射十字型激光时,通过所述红外相机进行拍摄,得到第二图像,所述预设周期与所述预设频率对应,将所述第一图像与所述第二图像进行像素差值处理,得到差异图像,所述差异图像可用于计算曝光时长和三维坐标。本发明实施例中,移动机器人的控制系统通过激光发射器组发射十字型激光,相比一字型线激光更能对抗环境光干扰,通过红外相机分别拍摄一个周期内在激光发射器组未发射十字型激光和发射十字型激光下的图像,由于拍摄的两张图像为连续拍摄,因此两张图像上的环境信息基本相同,最大的区别在于一张图像上包含激光信息,另一张图像上不包含激光信息,此时,将两张图像进行像素差值处理,去除了环境信息,保留了激光信息,有助于后续根据激光信息对障碍物进行检测,提高检测准确性。
技术特征:
1.一种移动机器人的控制系统,其特征在于,所述移动机器人的控制系统包括激光发射器组、红外相机和控制器;
2.根据权利要求1所述的移动机器人的控制系统,其特征在于,所述激光发射器组包括十字型激光发射器,所述十字型激光发射器设置于所述红外相机的斜上方。
3.根据权利要求2所述的移动机器人的控制系统,其特征在于,所述十字型激光发射器与所述红外相机的位置连线与水平线的夹角为45°。
4.根据权利要求1所述的移动机器人的控制系统,其特征在于,所述激光发射器组包括第一线激光发射器和第二线激光发射器,所述第一线激光发射器和所述第二线激光发射器发射的线激光相交于所述红外相机的视场角内,线激光相交的夹角呈90°。
5.根据权利要求4所述的移动机器人的控制系统,其特征在于,所述第一线激光发射器和所述第二线激光发射器中的一个设置于所述红外相机的正上方,另一个设置于所述红外相机的侧面,设置于侧面的线激光发射器与所述红外相机处于同一高度。
6.根据权利要求5所述的移动机器人的控制系统,其特征在于,设置于所述红外相机正上方的线激光发射器发射平行于地面的线激光,设置于所述红外相机侧面的线激光发射器发射垂直于地面的线激光。
7.一种移动机器人的控制方法,应用于移动机器人的控制系统,所述移动机器人的控制系统包括激光发射器组、红外相机和控制器,其特征在于,所述移动机器人的控制方法包括:
8.根据权利要求7所述的移动机器人的控制方法,其特征在于,所述控制器将所述第一图像与所述第二图像进行像素差值处理,得到差异图像,包括:
9.根据权利要求7所述的移动机器人的控制方法,其特征在于,在所述控制器将所述第一图像与所述第二图像进行像素差值处理,得到差异图像之后,还包括:
10.根据权利要求9所述的移动机器人的控制方法,其特征在于,所述控制器根据所述第二图像和所述差异图像获取曝光变量,包括:
11.根据权利要求9所述的移动机器人的控制方法,其特征在于,所述控制器根据所述曝光变量对所述红外相机的曝光时间进行更新,包括:
12.根据权利要求7所述的移动机器人的控制方法,其特征在于,在所述控制器将所述第一图像与所述第二图像进行像素差值处理,得到差异图像之后,还包括:
13.根据权利要求12所述的移动机器人的控制方法,其特征在于,所述若存在,则所述控制器根据所述目标激光图像计算在地图坐标系下障碍物的三维坐标,包括:
14.一种移动机器人的控制装置,其特征在于,所述移动机器人的控制装置包括:
15.一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,其特征在于,所述指令被处理器执行时实现如权利要求7-13中任一项所述移动机器人的控制方法。
技术总结
本发明涉及机器人领域,公开了一种移动机器人的控制系统、方法、装置及存储介质,用于提高检测准确性。移动机器人的控制系统包括:激光发射器组、红外相机和控制器,激光发射器组用于发射十字型激光,红外相机用于拍摄图像,控制器用于控制激光发射器组以预设频率发射十字型激光,在一个预设周期内,当激光发射器组未发射十字型激光时,通过红外相机进行拍摄,得到第一图像,当激光发射器组发射十字型激光时,通过红外相机进行拍摄,得到第二图像,预设周期与预设频率对应,将第一图像与第二图像进行像素差值处理,得到差异图像,差异图像可用于计算曝光时长和三维坐标。
技术研发人员:王定汉,请求不公布姓名,请求不公布姓名,吴兴伟,任娟娟,叶力荣
受保护的技术使用者:深圳银星智能集团股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!