一种用于光子集成干涉成像系统的光信号接收模块
本发明属于光学成像,尤其涉及一种用于光子集成干涉成像系统的光信号接收模块。
背景技术:
1、传统大型光学望远镜为了获得更高的分辨率和更全面的目标特征,其通光孔径需要不断增大,但整个光学系统的质量、体积、建造成本与功耗也会显著提高,传统光学望远镜的成本和观测能力在接近极限。
2、光子集成干涉成像系统区别于传统光学成像系统,由用于光子集成干涉成像系统的光信号接收模块、光信号传递处理模块、信号转换模块组成,用于光子集成干涉成像系统的光信号接收模块包含微透镜阵列等单元,利用小尺寸透镜实现系统体积的缩小,用于光子集成干涉成像系统的光信号接收模块利用光纤将微透镜阵列与光信号传递处理模块相连,光信号传递处理模块可以利用pic(光子集成)芯片实现高度集成化,大幅减小成像系统体积,利用频谱覆盖和傅里叶逆变换进行图像复原;在天文观测、航天航空器设备成像、地形探测等多领域表现出显著优势,其可灵活搭载于各种装备上,同时在一定图像处理下可实现高质量成像。现有的用于光子集成干涉成像系统的光信号接收模块获取信息受限,排布单一,导致空间利用率不高,使整个光子集成干涉成像系统的发展受限。为此我们提出一种用于光子集成干涉成像系统的光信号接收模块。
技术实现思路
1、本发明的目的在于提供一种用于光子集成干涉成像系统的光信号接收模块,旨在解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种用于光子集成干涉成像系统的光信号接收模块,包括:
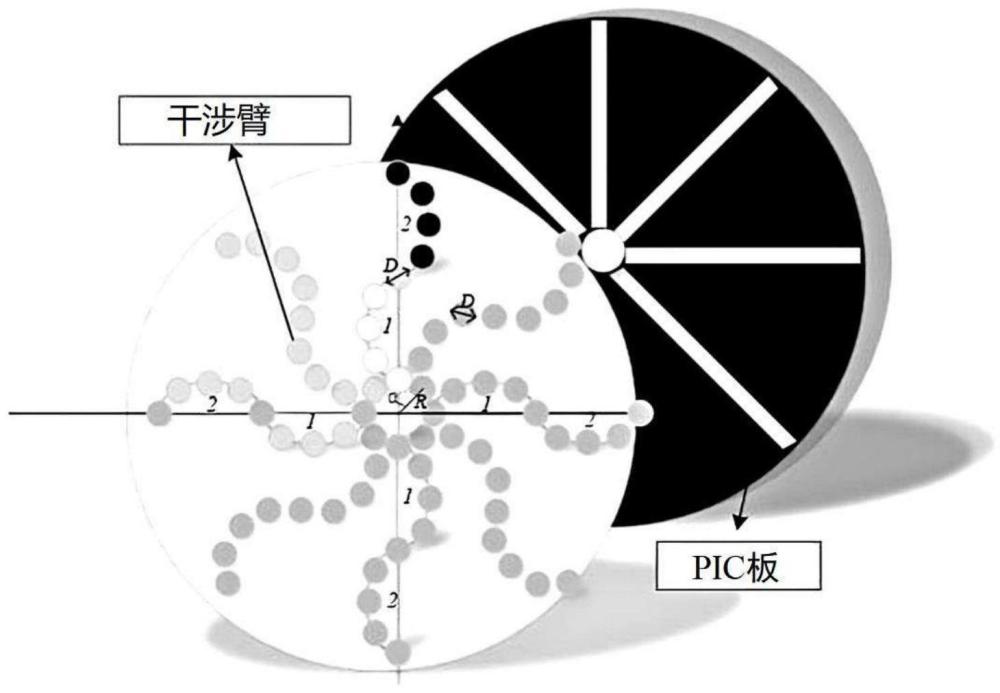
4、微透镜阵列单元,所述微透镜阵列单元呈s型双向弯曲结构,所述微透镜阵列单元包括多条干涉臂,每条干涉臂由两条相同的圆弧反方向拼接组成,且每条所述干涉臂上的透镜两两配对,两个相配对的透镜相对于干涉臂的中点呈对称排布;
5、承载微透镜阵列盘单元,放置于微透镜阵列单元的下方,所述承载微透镜阵列盘单元用于安装与定位微透镜阵列单元并使得微透镜阵列单元与其他元件分隔。
6、进一步的,建立所述微透镜阵列单元的步骤如下:
7、步骤s1、根据下式计算相邻干涉臂的夹角α,干涉臂靠近系统中心的最内侧透镜紧密排布形成闭合圆环,利用首尾透镜中心相连形成的直线确定夹角α大小:
8、
9、其中,g表示干涉臂数量;
10、步骤s2、根据下式计算最内侧紧密排列的透镜中心到系统原点的距离r:
11、
12、其中,d表示透镜的直径,α表示相邻干涉臂之间的夹角;
13、步骤s3、根据下式计算首尾透镜配对形成的基线长度b与单个干涉臂上透镜数目l的关系:
14、
15、其中,d表示同一干涉臂上相邻透镜间的距离,d大于透镜的直径d,扇形圆心角为90°;
16、步骤s4、根据下式计算同一圆弧上的两个相邻透镜对应于此圆弧的圆心角β:
17、
18、其中,l表示单个干涉臂上透镜的数目;
19、步骤s5、根据下式计算设置于系统坐标系y轴正半轴的初始干涉臂包含的圆弧1的圆心m1和圆弧2的圆心m2坐标:
20、
21、
22、其中,x和y表示坐标,最靠近系统原点的圆弧设为圆弧1,最外侧圆弧设为圆弧2;
23、步骤s61、根据下式计算初始干涉臂上圆弧1上透镜中心的坐标,根据圆弧1圆心m1(m1x,m1y)的位置表示为:
24、
25、
26、其中,i表示设定的初始干涉臂干涉臂上的第i个透镜;
27、步骤s62、根据下式计算初始干涉臂上圆弧2上透镜中心的坐标,根据弧2的圆心m2(m2x,m2y)的位置表示为:
28、
29、
30、步骤s7、根据下式计算干涉臂上任意透镜中心与y轴的夹角θ:
31、
32、其中,nx(i,1)和ny(i,1)表示干涉臂上的透镜中心坐标;
33、步骤s8、根据下式计算任意透镜相对坐标系原点的直线距离:
34、
35、步骤s9、根据下式计算微透镜阵列单元中所有透镜坐标点:
36、nx(i,h)=n*sin((h-1)α+θ)
37、ny(i,h)=n*cos((h-1)α+θ)
38、其中,n表示透镜中心相对坐标系原点的距离,h表示从设定的初始干涉臂开始的第h条干涉臂,初始干涉臂h为1,α表示相邻干涉臂的夹角,θ表示干涉臂上任意透镜中心与y轴的夹角。
39、进一步的,所述步骤s1中,干涉臂的数量在10以上。
40、进一步的,通过所述微透镜阵列单元计算频谱覆盖,公式如下:
41、
42、
43、其中,δdx和δdy表示所设置的一条干涉臂上相配对的两个透镜之间的矢量距离,f表示当前所接收的光信号中需要处理的光的频率,z表示光信号接收模块与所观测目标的距离,ρ表示用于补偿距离的系数。
44、进一步的,每条所述干涉臂上的透镜两两配对的具体方法为:
45、通过第一个透镜和相对应的最后一个透镜进行配对、第二个干涉臂和倒数第二个透镜进行配对的方式形成配对规律,其他透镜按配对规律依次进行配对。
46、进一步的,所述承载微透镜阵列盘单元与微透镜阵列单元的排布相同。
47、进一步的,所述微透镜阵列单元的每个透镜后均设置有波导。
48、与现有技术相比,本发明的有益效果是:
49、1、本发明使得微透镜阵列排布得到优化,在有限空间内可以布置更多透镜,空间利用率提升;同时透镜配对形成基线,由于干涉臂设计为类似s型的弯曲结构,透镜的位置不是单一地成直线排列,基线的方向性增多,透镜配对形成的基线方向更加丰富,所获得信息量更大,在通过整个光子集成干涉成像系统复原得到的图像质量会更高;
50、2、本发明具有体积小、重量轻和造价低的优点;
51、3、本发明使用微透镜阵列单元对环境进行探测收集信号,可将该模块与多种设备配合使用;并且可通过与现有技术中的pic芯片等组件相组合,引入图像重构算法,达到不同的成像质量要求。
技术特征:
1.一种用于光子集成干涉成像系统的光信号接收模块,其特征在于,包括:
2.根据权利要求1所述的用于光子集成干涉成像系统的光信号接收模块,其特征在于,建立所述微透镜阵列单元的步骤如下:
3.根据权利要求2所述的用于光子集成干涉成像系统的光信号接收模块,其特征在于,所述步骤s1中,干涉臂的数量在10以上。
4.根据权利要求1所述的用于光子集成干涉成像系统的光信号接收模块,其特征在于,通过所述微透镜阵列单元计算频谱覆盖,公式如下:
5.根据权利要求1所述的用于光子集成干涉成像系统的光信号接收模块,其特征在于,每条所述干涉臂上的透镜两两配对的具体方法为:
6.根据权利要求1所述的用于光子集成干涉成像系统的光信号接收模块,其特征在于,所述承载微透镜阵列盘单元与微透镜阵列单元的排布相同。
7.根据权利要求1所述的用于光子集成干涉成像系统的光信号接收模块,其特征在于,所述微透镜阵列单元的每个透镜后均设置有波导。
技术总结
本发明适用于光学成像技术领域,提供了一种用于光子集成干涉成像系统的光信号接收模块,包括:微透镜阵列单元,所述微透镜阵列单元呈S型双向弯曲结构,所述微透镜阵列单元包括多条干涉臂,每条干涉臂由两条相同的圆弧反方向拼接组成,且每条所述干涉臂上的透镜两两配对,两个相配对的透镜相对于干涉臂的中点呈对称排布;承载微透镜阵列盘单元,用于安装与定位微透镜阵列单元并使得微透镜阵列单元与其他元件分隔。本发明实现了小体积和轻量化设计,能够在有限空间内收集到更多光信号,提升了空间利用率;本发明可应用于航空航天探测成像,通过与其他元件配合形成光子集成干涉成像系统,得到更好的图像处理效果。
技术研发人员:张旺,徐乾辰
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!