一种移动平台实时姿态预测方法及装置与流程
本发明属于移动平台姿态监测领域,更具体地,涉及一种移动平台实时姿态预测方法及装置。
背景技术:
1、运动过程中,移动平台上的设备会随着移动平台一起产生不同角度不同周期的横纵摇。移动平台上的光学信号接收设备接收光学信号时,需要建立稳定的光学信道。通常综合利用姿态测量设备、伺服控制系统组成跟瞄系统实现光学信道的建立、维持。在跟瞄系统中,首先通过姿态测量设备获得平台运动姿态,再通过算法模型对姿态进行解算和处理,最后输出控制信号对伺服控制系统进行控制,从而保证光学信道稳定。其中,姿态测量设备作为跟瞄系统的前端,在进行数据采样以及数据传输过程中可能带来系统延迟,导致跟瞄系统控制信号滞后,无法建立光学信道。因此,需要根据前期数据来实时预测平台姿态,降低系统延迟,提高跟瞄速度和精度,为光学信号接收过程建立稳定的光学信道。
2、移动平台姿态预测的算法有传统方法和深度学习方法,例如自回归模型、bp预测模型、极限学习机方法、长短时记忆(lstm)网络等方法。这些方法大多存在一些缺点,如更新速度慢、预测效率低无法满足实时性需求,算法占用内存大对计算、内存空间要求高等。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提供一种移动平台实时姿态预测方法及装置,旨在解决现有的预测方法更新速度慢、预测效率低,无法满足实时性要求的问题。
2、为实现上述目的,按照本发明的一方面,提供了一种移动平台实时姿态预测方法,该方法包括如下步骤:
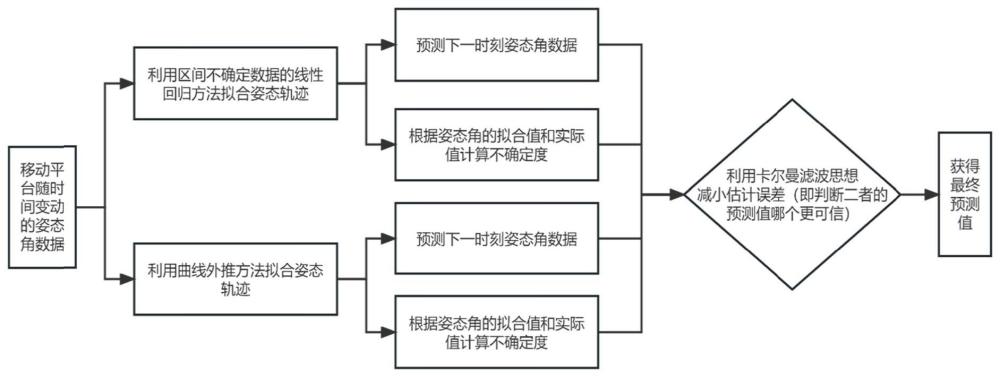
3、s1基于当前时刻预设时间区间内的姿态数据,利用区间线性回归算法拟合姿态轨迹,然后根据拟合的姿态轨迹获得该时间区间内多个数据点姿态角的拟合值,将其与各个数据点姿态角的实际值进行比较以获得区间线性回归算法的不确定度;
4、s2利用曲线外推算法重复步骤s1以获得曲线外推算法的不确定度;
5、s3利用卡尔曼滤波思想根据步骤s1和步骤s2获得的不确定度计算两种预测方法的协方差,最后根据所述协方差以及两种算法得到的下一时刻姿态角的拟合值,获得下一时刻姿态角的预估值,以此对移动平台进行实时姿态预测。
6、作为进一步优选地,步骤s1和步骤s2中,所述预设时间区间为1s~5s,所述姿态数据为俯仰角数据、横倾角数据或航向角数据。
7、作为进一步优选地,步骤s1和步骤s2中,所述不确定度为偏差均值、平均误差、绝对误差或者平均误差与绝对误差的比值。
8、作为进一步优选地,步骤s2中,所述曲线外推算法包括二次曲线法、三次曲线法或生长曲线法。
9、作为进一步优选地,步骤s3具体包括如下子步骤:
10、s31根据步骤s1和步骤s2获得的不确定度,利用下式分别计算两种预测方法对应的估计误差,
11、
12、式中,eest为估计误差,为当前时刻姿态角的拟合值,yn为当前时刻姿态角的实际值,u为不确定度;
13、s32利用下式根据两种预测方法的所述估计误差计算协方差,
14、或
15、式中,kk、kk’为协方差,为区间线性回归算法的估计误差,为曲线外推算法的估计误差;
16、s33利用下式根据所述协方差以及两种算法得到的下一时刻姿态角的拟合值,获得下一时刻姿态角的预估值,
17、或
18、式中,为下一时刻姿态角的预估值,为曲线外推算法中下一时刻姿态角的拟合值,为区间线性回归算法中下一时刻姿态角的拟合值。
19、按照本发明的另一方面,提供了一种移动平台实时姿态预测装置,该装置包括区间线性回归单元、曲线外推单元和卡尔曼滤波单元,其中:
20、所述区间线性回归单元用于基于当前时刻预设时间区间内的姿态数据,利用区间线性回归算法拟合姿态轨迹,然后根据拟合的姿态轨迹获得该时间区间内多个数据点姿态角的拟合值,将其与各个数据点姿态角的实际值进行比较以获得区间线性回归算法的不确定度;
21、所述曲线外推单元用于基于当前时刻预设时间区间内的姿态数据,利用曲线外推算法拟合姿态轨迹,然后根据拟合的姿态轨迹获得该时间区间内多个数据点姿态角的拟合值,将其与各个数据点姿态角的实际值进行比较以获得曲线外推算法的不确定度;
22、所述卡尔曼滤波单元用于根据区间线性回归单元和曲线外推单元获得的不确定度计算两种预测方法的协方差,最后根据所述协方差以及两种算法得到的下一时刻姿态角的拟合值,获得下一时刻姿态角的预估值,以此对移动平台进行实时姿态预测。
23、作为进一步优选地,所述预设时间区间为1s~5s,所述姿态数据为俯仰角数据、横倾角数据或航向角数据。
24、作为进一步优选地,所述不确定度为偏差均值、平均误差、绝对误差或者平均误差与绝对误差的比值。
25、作为进一步优选地,所述曲线外推算法包括二次曲线法、三次曲线法或生长曲线法。
26、作为进一步优选地,卡尔曼滤波单元的计算过程具体为:
27、(1)根据区间线性回归单元和曲线外推单元获得的不确定度,利用下式分别计算两种预测方法对应的估计误差,
28、
29、式中,eest为估计误差,为当前时刻姿态角的拟合值,yn为当前时刻姿态角的实际值,u为不确定度;
30、(2)利用下式根据两种预测方法的所述估计误差计算协方差,
31、或
32、式中,kk、kk’为协方差,为区间线性回归算法的估计误差,为曲线外推算法的估计误差;
33、(3)利用下式根据所述协方差以及两种算法得到的下一时刻姿态角的拟合值,获得下一时刻姿态角的预估值,以此对移动平台进行实时姿态预测,
34、或
35、式中,为下一时刻姿态角的预估值,为曲线外推算法中下一时刻姿态角的拟合值,为区间线性回归算法中下一时刻姿态角的拟合值。
36、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
37、1.本发明将区间线性回归算法和曲线外推算法应用于移动平台的实时姿态预测中,通过两种算法拟合姿态轨迹并获得其对应的不确定度,然后利用卡尔曼滤波的思想综合两种算法的预测结果以进一步减小预测误差,从而实现对移动平台的实时姿态预测,与传统方法和深度学习方法相比具有更新速度快、预测效率高的优势,从而能够有效解决高精度姿态预测方法的姿态角传播时延问题;
38、2.同时,考虑到长期来看移动平台随时间变动的姿态角数据呈现非线性运动,既不是直线运动也不是二次曲线运动,本发明对选取姿态数据的时间区间进行优化,采用当前时刻之前1s~5s内的移动平台姿态数据,较短时间区间内姿态数据呈现上升或下降趋势,利用该姿态数据进行姿态轨迹拟合能够补偿延迟的影响,简化算法提高效率。
技术特征:
1.一种移动平台实时姿态预测方法,其特征在于,该方法包括如下步骤:
2.如权利要求1所述的移动平台实时姿态预测方法,其特征在于,步骤s1和步骤s2中,所述预设时间区间为1s~5s,所述姿态数据为俯仰角数据、横倾角数据或航向角数据。
3.如权利要求1所述的移动平台实时姿态预测方法,其特征在于,步骤s1和步骤s2中,所述不确定度为偏差均值、平均误差、绝对误差或者平均误差与绝对误差的比值。
4.如权利要求1所述的移动平台实时姿态预测方法,其特征在于,步骤s2中,所述曲线外推算法包括二次曲线法、三次曲线法或生长曲线法。
5.如权利要求1~4任一项所述的移动平台实时姿态预测方法,其特征在于,步骤s3具体包括如下子步骤:
6.一种移动平台实时姿态预测装置,其特征在于,该装置包括区间线性回归单元、曲线外推单元和卡尔曼滤波单元,其中:
7.如权利要求6所述的移动平台实时姿态预测装置,其特征在于,所述预设时间区间为1s~5s,所述姿态数据为俯仰角数据、横倾角数据或航向角数据。
8.如权利要求6所述的移动平台实时姿态预测装置,其特征在于,所述不确定度为偏差均值、平均误差、绝对误差或者平均误差与绝对误差的比值。
9.如权利要求6所述的移动平台实时姿态预测装置,其特征在于,所述曲线外推算法包括二次曲线法、三次曲线法或生长曲线法。
10.如权利要求6~9任一项所述的移动平台实时姿态预测装置,其特征在于,卡尔曼滤波单元的计算过程具体为:
技术总结
本发明提供了一种移动平台实时姿态预测方法及装置,属于移动平台姿态监测领域,该方法包括如下步骤:基于当前时刻预设时间区间内的姿态数据,利用区间线性回归算法拟合姿态轨迹,然后根据拟合的姿态轨迹获得该时间区间内多个数据点姿态角的拟合值,将其与各个数据点姿态角的实际值进行比较以获得区间线性回归算法的不确定度;利用曲线外推算法重复上述步骤以获得曲线外推算法的不确定度;利用卡尔曼滤波思想根据获得的不确定度计算两种预测方法的协方差,最后根据该协方差获得下一时刻姿态角的预估值。本发明具有更新速度快、预测效率高的优势,从而能够有效解决高精度姿态预测方法的姿态角传播时延问题。
技术研发人员:李晓涵,李亚平,费礼,张未冬,万梓傲,江桂英,朱启明,文柯
受保护的技术使用者:武汉船舶通信研究所(中国船舶集团有限公司第七二二研究所)
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!