一种用于坐标测量及信息节点关联的系统及其测量方法
本发明涉及测量测试,具体涉及一种用于坐标测量及信息节点关联的系统及其测量方法。
背景技术:
1、随着技术发展,现有大型试验系统电测传感器和通道数量破千,而现有的传感器-导线-通道信息关联方式存在很多缺陷,随着需要做的大型试验次数越来越多,在待测量仪器上粘贴应变片以及编码识别,建立传感器-通道联系不可或缺。在对传感器和通道进行信息关联时,现有方式利用其中连接的导线进行信息对应关联,然而当传感器和通道数量破千后,导线数量也会增多,在传感器和通道之间的导线不可避免的会出现交错或者缠绕,这种情况下在上千条导线两端进行对应传感器和通道的信息就显得极为复杂耗时;需要在应变片,靠近应变片的导线端,通道以及靠近通道的导线端分别进行编码和粘贴,此过程需要耗费很多时间和人力物力;在求解传感器坐标后,将传感器编号,传感器坐标以及通道编号这些信息进行录入数据库时都需要手动操作,寻找传感器-通道的对应关系,以及在检查勘误方面都要耗费相当长的时间;在实验时移动设备和导线时,贴纸上的编码内容容易沾染污渍或者被损坏而失去被有效识别的功能,同时给移动实验设备也带来不便;需要定期维护或者检查粘贴的编码,并且所耗费时间成本较高;实验结束后拆除亦需要耗费大量时间和人力。综上所述,目前有必要提出一种传感器-通道快速信息关联的方式,从而面向测量测试领域,降低实验前的准备时间以及人力成本。
技术实现思路
1、本发明的目的在于提供一种用于坐标测量及信息节点关联的系统,以解决现有的线缆交错或缠绕、需要手动录入数据库,寻找传感器和通道的对应关系和检查勘误均耗费时间、贴纸易损坏、实验结束后拆除设备费成本高的缺陷问题,以降低实验前的准备时间和人力成本。
2、本发明解决上述技术问题的技术方案如下:
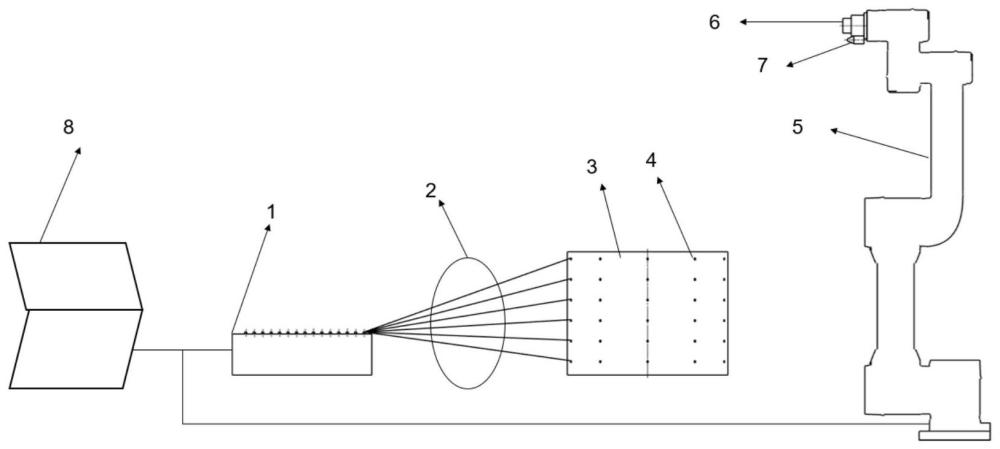
3、本发明提供一种用于坐标测量及信息节点关联的系统,所述用于坐标测量及信息节点关联的系统包括:
4、测量仪器,所述测量仪器具有多个测量位置;
5、多个传感器,多个所述传感器设置在多个测量位置上;
6、机器人,所述机器人上设置有相机,所述相机设置于所述机器人的顶部,以用于拍摄各所述传感器的图像特征;
7、激光发射器,所述激光发射器设置在相机下方,以向各所述传感器发射激光,各所述传感器接收所述激光后形成电信号;
8、采集装置,所述采集装置包括多个采集通道;
9、线缆,所述线缆用于传输电信号,所述线缆将各所述传感器和各所述采集通道一一对应连接,以使得各所述采集通道能捕捉对应所述传感器的电信号;
10、计算机,所述计算机通过线缆分别连接机器人和采集装置,所述计算机用于接收并识别所述图像特征,以及,接收并标记所述电信号,并将所述电信号和所述图像特征进行信息节点关联。
11、可选择地,所述机器人设置在能使相机拍摄到各所述传感器的位置;所述机器人为六自由度机器人,以使得相机在所述机器人的自由度范围内对任一传感器拍摄不同角度的特征图像。
12、可选择地,所述机器人中设置有路径规划模块且包括执行器,所述路径规划模块用于控制机器人带动所述相机根据规划路径在所述执行器模块进行移动。
13、可选择地,各所述传感器为应变片。
14、本发明还提供一种用于坐标测量及信息节点关联的系统的测量方法,所述用于坐标测量及信息节点关联的系统的测量方法包括:
15、s1:控制激光发射器照射目标传感器,得到传感器-采集通道对应通道信息;
16、s2:对所述通道信息进行处理并记录通道编号;
17、s3:控制所述相机拍摄特征图像,得到图像特征;
18、可选择地,所述s3中,特征图像为各类试验中带有传感器的试验件的图像,所述图像特征为各类传感器形貌特征。
19、s4:对所述图像特征进行处理,得到目标传感器的编号和坐标;
20、s5:将所述通道编号、所述传感器坐标和所述传感器编号进行信息关联操作,得到子信息关联数据;
21、s6:控制机器人按照规划路径重复s1-s5操作,对多个所述传感器进行信息关联,得到全部信息关联数据。
22、可选择地,所述s1包括:
23、s11:控制激光发射器发射激光以照射目标传感器,所述目标传感器接收所述激光照射以产生电信号;
24、s12:控制所述采集通道对所述电信号进行捕捉,获得传感器-采集通道对应电信号。
25、可选择地,所述s4包括:
26、s41:识别所述目标传感器当前姿态所对应的特征图像信息并根据所述特征图像生成当前姿态对应的相机光轴直线方程;
27、s42:根据所述当前姿态所对应的相机光轴直线方程计算所述目标传感器的坐标;
28、s43:调整机器人姿态,使待定位传感器位于相机视场中心,拍摄所述目标传感器不同角度的特征图像;
29、s44:判断所述坐标数量是否达到预设数量,若是,进入s45;否则,返回s41;
30、s45:将距离目标直线最短的姿态所对应的坐标作为所述目标传感器的坐标;
31、s46:输出所述目标传感器的坐标和编号。
32、可选择地,所述相机光轴直线方程为:
33、
34、其中,为机器人(5)末端坐标系与机器人(5)基坐标系的坐标变换矩阵,n为机器人的轴数,为相邻两关节坐标系的变换矩阵,i为机器人轴数的循环变量,θi为机器人(5)第i轴的角位移。
35、可选择地,所述规划路径为:
36、a1:根据相机当前光心位置与光轴确定移动平面,设定初始步长;
37、a2:以相机的聚焦中心为原点,以光轴为z轴,以分别平行于拍摄图像长度方向和宽度方向的两个方向为x轴和y轴,建立三维直角坐标系;
38、a3:控制所述机器人在移动平面内分别按照所述三维直角坐标系x轴、y轴的正、负方向进行移动;
39、a4:判断当前移动方向内是否存在拍摄目标,若存在,则沿当前移动方向继续移动,否则,改变当前移动方向并返回a1。
40、本发明具有以下有益效果:
41、1、用于坐标测量及信息节点关联的系统能快速准确的建立起关联信息;
42、2、用于坐标测量及信息节点关联的系统测量技术简单,测量精度高,降低人力成本,降低实验前的准备时间,适用于各种实验环境,适合实际工程需求。
技术特征:
1.一种用于坐标测量及信息节点关联的系统,其特征在于,包括:
2.根据权利要求1所述的用于坐标测量及信息节点关联的系统,其特征在于,所述机器人(5)设置在能使相机(6)拍摄到各所述传感器(4)的位置;所述机器人(5)为六自由度机器人,以使得相机(6)在所述机器人(5)的自由度范围内对任一传感器(4)拍摄不同角度的特征图像。
3.根据权利要求1所述的用于坐标测量及信息节点关联的系统,其特征在于,所述机器人(5)中设置有路径规划模块且包括执行器,所述路径规划模块用于控制所述机器人(5)带动所述相机(6)根据规划路径在所述执行器模块进行移动。
4.根据权利要求1所述的用于坐标测量及信息节点关联的系统,其特征在于,各所述传感器(4)为应变片。
5.一种基于权利要求1至4中任意一项所述的用于坐标测量及信息节点关联的系统的测量方法,其特征在于,所述用于坐标测量及信息节点关联的系统的测量方法包括:
6.根据权利要求5所述的用于坐标测量及信息节点关联的系统的测量方法,其特征在于,所述s1包括:
7.根据权利要求5所述的用于坐标测量及信息节点关联的系统的测量方法,其特征在于,所述s4包括:
8.根据权利要求7所述的用于坐标测量及信息节点关联的系统的测量方法,其特征在于,所述相机光轴直线方程为:
9.根据权利要求5至8中任意一项所述的用于坐标测量及信息节点关联的系统的测量方法,其特征在于,所述规划路径包括:
技术总结
本发明公开了一种用于坐标测量及信息节点关联的系统及其测量方法,属于测量测试领域,为了解决现有的线缆交错或缠绕、需要手动录入数据库,寻找传感器和通道的对应关系和检查勘误均耗费时间、贴纸易损坏、实验结束后拆除设备成本高的缺陷问题,用于坐标测量及信息节点关联的系统包括:测量仪器(3)、传感器(4)、机器人(5)、机器人(5)上设置有相机(6)、激光发射器(7)、采集装置(1)、线缆(2)和计算机(8)。本发明能快速准确的建立关联信息,提高实验效率;测量技术简单,测量精度高,降低人力成本,降低实验前的准备时间,适用于各种实验环境,适合实际工程需求。
技术研发人员:周才华,王博,毕祥军,杜凯繁,刘虎威,孙宏扬,李杨旭,刘志超
受保护的技术使用者:大连理工大学
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!