一种惯组小系统角振动谱确定方法与流程
本发明涉及一种惯组小系统角振动谱确定方法,属于空天飞行器。
背景技术:
1、角振动试验是航天器一项测量惯组小系统传递特性的试验,只在检验惯组的动态特性是否满足控制系统需求。目前随着控制系统带宽的不断提升,惯组的采样率也随之提升,而减震器、加速度计、陀螺、安装支架的频率设计上难以真正实现错峰,因此惯组作为飞行器的敏感器件,研究其小系统动力学传递特性对控制系统稳定具有重要的意义。角振动试验包括三向线振动下惯组小系统惯组线-线振动传递特性测量、惯组安装处线-线振动传递特性测量;三向线振动下,惯组小系统惯组线-角振动传递特性测量、惯组安装处线-角振动传递特性测量;三向角振动下,惯组小系统惯组角-角振动传递特性测量、惯组安装处角-角振动传递特性测量。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供了一种惯组小系统角振动谱确定方法,解决角振动试验缺少试验条件确定方法的问题。
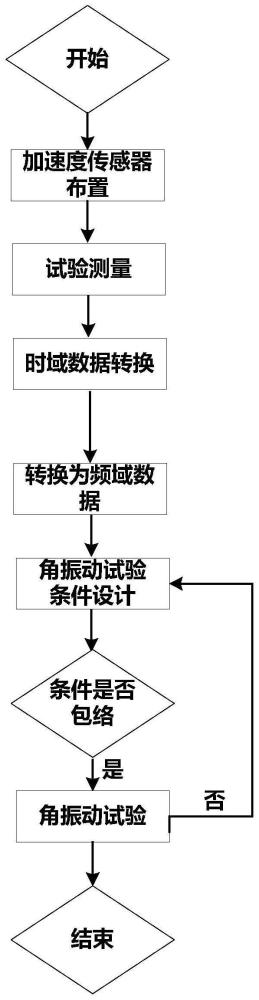
2、本发明的技术解决方案是:一种惯组小系统角振动谱确定方法,包括:
3、按照预设要求在惯组小系统的惯组支架上布置加速度传感器;
4、获取飞行器飞行过程中惯组支架预设典型位置的加速度时域响应数据;
5、按照位置关系对加速度时域响应数据进行处理,得到惯组支架的角速度时域响应曲线;
6、将角速度时域响应曲线转化为频域曲线,并根据频域曲线进行包络设计,得到惯组角振动试验的角振动振动试验条件,用于后续角振动试验验证。
7、进一步地,所述惯组小系统包括惯组、减震器和惯组安装支架;
8、惯组安装在惯组安装支架上;
9、减震器为内减震器时,内嵌在惯组中,安装时惯组与惯组安装支架直接连接;减震器为外减震器时,与惯组组合后再安装在惯组安装支架上。
10、进一步地,所述按照预设要求在惯组小系统的惯组支架上布置加速度传感器,包括:
11、传感器数量为3~6;
12、加速度传感器的采样率、频率范围、量程、分辨率满足预设需求;
13、加速度传感器测量的通道至少包括安装处法向的振动;
14、加速度传感器布置在惯组安装支架的边界、且刚度最大的位置处;
15、加速度传感器安装后,记录加速度传感器的位置,测量加速度传感器之间的距离。
16、进一步地,加速度传感器个数为6时,在边界处按照2×3排列布置。
17、进一步地,所述获取飞行器飞行过程中惯组支架预设典型位置的加速度时域响应数据的方法为噪声试验,包括:
18、将惯组小系统和加速度传感器安装在全飞行器或者飞行器的舱段上,并与噪声试验工装连接;
19、将安装好的全飞行器或者舱段置于在混响室或行波管中;
20、加载约定的噪声载荷,开展噪声试验,同时加速度传感器开始记录时域数据;试验持续时间以记录到满足要求的试验数据为准。
21、进一步地,所述获取飞行器飞行过程中惯组支架预设典型位置的加速度时域响应数据的方法为真实飞行试验,包括:
22、将惯组小系统和加速度传感器安装在全飞行器的惯组安装支架上;
23、飞行过程中全程记录加速度传感器的振动时域数据。
24、进一步地,取加速度传感器的振动时域数据中响应大于预设值的时间段进行后续分析,选择的时间段持续30s以上;所述大于预设值的时间段包括跨声速段。
25、进一步地,所述按照位置关系对加速度时域响应数据进行处理包括:
26、利用加速度传感器测量的时域数据和位置关系进行差分后,再进行积分,分别得到俯仰和滚转角速度时域响应,分别为:
27、俯仰角速度:∫(ay1-ay2)/lxdt,∫(ay3-ay4)/lxdt,∫(ay5-ay6)/lxdt
28、滚转角速度:∫(ay2-ay6)/lzdt,∫(ay1-ay5)/lzdt
29、式中ay为各点的法向振动响应;l为加速度传感器之间的距离。
30、进一步地,所述将角速度时域响应曲线转化为频域曲线包括:根据预设标准将角速度时域曲线处理成角速度功率谱曲线。
31、进一步地,所述包络设计包括:对所有工况的角速度功率谱曲线进行包络,根据预设安全系数计算确定得到惯组角振动试验条件。
32、本发明与现有技术相比的优点在于:
33、(1)本发明通过真实测量噪声试验或飞行试验中惯组支架的振动响应作为输入,避免了角振动试验中“欠试验”和“过试验”现象发生;
34、(2)本发明通过测量平动加速度差分加积分法间接获取各向角速度,解决了惯组安装位置角速度测量难题;
35、(3)本发明通过点阵布置惯组支架上的传感器测量平动加速度,实现了各向角速度测量的冗余。
技术特征:
1.一种惯组小系统角振动谱确定方法,其特征在于,包括:
2.根据权利要求1所述的一种惯组小系统角振动谱确定方法,其特征在于,所述惯组小系统包括惯组、减震器和惯组安装支架;
3.根据权利要求1所述的一种惯组小系统角振动谱确定方法,其特征在于,所述按照预设要求在惯组小系统的惯组支架上布置加速度传感器,包括:
4.根据权利要求3所述的一种惯组小系统角振动谱确定方法,其特征在于,加速度传感器个数为6时,在边界处按照2×3排列布置。
5.根据权利要求1所述的一种惯组小系统角振动谱确定方法,其特征在于,所述获取飞行器飞行过程中惯组支架预设典型位置的加速度时域响应数据的方法为噪声试验,包括:
6.根据权利要求1所述的一种惯组小系统角振动谱确定方法,其特征在于,所述获取飞行器飞行过程中惯组支架预设典型位置的加速度时域响应数据的方法为真实飞行试验,包括:
7.根据权利要求6所述的一种惯组小系统角振动谱确定方法,其特征在于,取加速度传感器的振动时域数据中响应大于预设值的时间段进行后续分析,选择的时间段持续30s以上;所述大于预设值的时间段包括跨声速段。
8.根据权利要求1所述的一种惯组小系统角振动谱确定方法,其特征在于,所述按照位置关系对加速度时域响应数据进行处理包括:
9.根据权利要求1所述的一种惯组小系统角振动谱确定方法,其特征在于,所述将角速度时域响应曲线转化为频域曲线包括:根据预设标准将角速度时域曲线处理成角速度功率谱曲线。
10.根据权利要求1所述的一种惯组小系统角振动谱确定方法,其特征在于,所述包络设计包括:对所有工况的角速度功率谱曲线进行包络,根据预设安全系数计算确定得到惯组角振动试验条件。
技术总结
一种惯组小系统角振动谱确定方法,属于空天飞行器技术领域。本发明包括:按照预设要求在惯组小系统的惯组支架上布置加速度传感器;获取飞行器飞行过程中惯组支架预设典型位置的加速度时域响应数据;按照位置关系对加速度时域响应数据进行处理,得到惯组支架的角速度时域响应曲线;将角速度时域响应曲线转化为频域曲线,并根据频域曲线进行包络设计,得到惯组角振动试验的角振动振动试验条件,用于后续角振动试验验证。本发明本发明通过真实测量噪声试验或飞行试验中惯组支架的振动响应作为输入,避免了角振动试验中“欠试验”和“过试验”现象发生。
技术研发人员:张家雄,张华山,陈雅曦,韩金鹏,周正阳,杜志博,陈尚,谭珏,刘菲,张月玲,穆星科,满益明,曹晓瑞,杨勇,朱永贵
受保护的技术使用者:北京宇航系统工程研究所
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!