一种机器人在隧道内的自动导航装置的制作方法
本申请涉及智能机器人作业的领域,尤其是涉及一种机器人在隧道内的自动导航装置。
背景技术:
1、使用机器人在隧道内作业时,需要自主移动,正常情况下采用人工手动遥控机器人的移动,但某些特殊作业时,环境恶劣影响人员的操作,导致作业效率低。
技术实现思路
1、有鉴于此,本申请提供一种机器人在隧道内的自动导航装置,解决了现有技术中的问题,在隧道场景,使作业机器人实现厘米级精度的自主导航,本申请提供的一种机器人在隧道内的自动导航装置采用如下的技术方案:
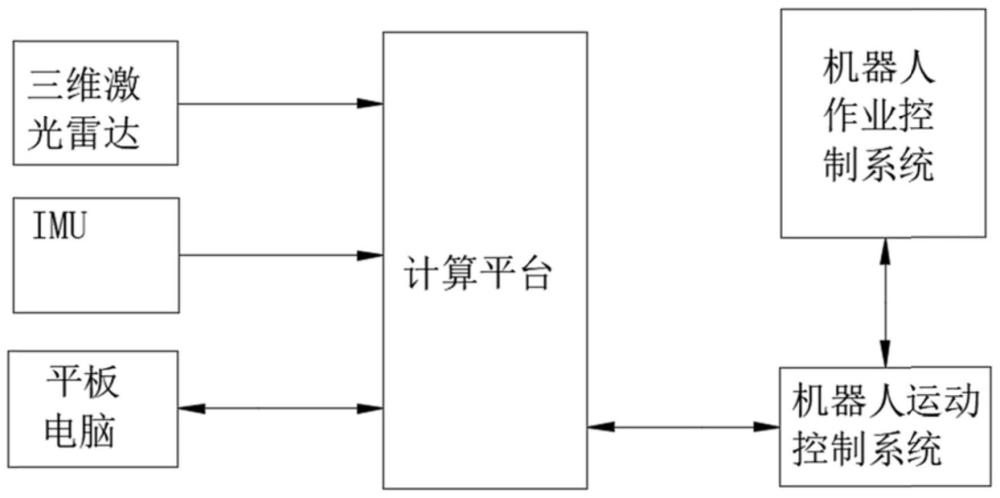
2、一种机器人在隧道内的自动导航装置,机器人包括运动控制器,自动导航装置包括三维激光雷达和计算平台,所述三维激光雷达扫描隧道得到点云数据,所述计算平台根据点云数据提取出隧道两侧洞壁的直线拟合方程,所述计算平台根据设定好的导航配置参数以及机器人实时反馈的里程信息生成自动导航路线并计算出机器人行走速度和角速度,所述计算平台根据机器人行走速度和角速度得到机器人每个轮组的转速和转角,所述计算平台把每个轮组的转速和转角发给运动控制器;所述运动控制器根据轮组编码器获取轮组的位移作为里程信息发给计算平台。
3、可选的,自动导航装置还包括平板电脑,所述平板电脑和计算平台通信连接用于对机器人的导航状态进行显示,所述平板电脑用于操作人员与计算平台进行交互。
4、可选的,自动导航装置还包括惯性测量单元,所述惯性测量单元用于检测机器人的运动姿态,所述计算平台记录三维激光雷达点云数据、i mu数据、里程信息,且所述计算平台在作业结束后对隧道内作业场景进行三维建模。
5、可选的,所述计算平台对采集到的三维雷达点云进行直通滤波,选取隧道两侧洞壁的点云;所述计算平台对直通滤波后的点云进行栅格处理,映射到一个水平面上;所述计算平台对栅格点云数据利用最小二乘法进行直线拟合,判断直线的拟合程度,得到洞壁的直线拟合方程。
6、可选的,所述计算平台根据洞壁的直线拟合方程实时计算激光雷达相对于洞壁的距离偏差δρ1和角度偏差δθ1,通过对激光雷达在机器人的安装位置和角度进行补偿,得到机器人运动中心相对于洞壁的距离偏差δρ2和角度偏差δθ2,通过p id控制算法,以距离偏差δρ2和角度偏差δθ2为输入参数,得到机器人的行走速度和角速度。
7、可选的,三维建模的步骤包括:
8、前端匹配:所述计算平台通过雷达点云的单帧匹配建立并维护一系列的子图,子图的表示格式为栅格地图,每当有新的雷达帧,则通过匹配算法将雷达帧插入到子图中的序列中;
9、通过闭环检测消除前端匹配过程中的累积误差:当一个子图构建完成,算法将当前子图加入到闭环检测中,检测出相同图像来识别出之前到访过的地点,对路径轨迹进行优化重定位,得到机器人优化后的轨迹,构建实际场景的空间地图。
10、可选的,所述计算平台通过网口采集激光雷达点云数据,计算平台通过tcp/ip接口向运动控制器发送每个轮组的转速和转角。
11、可选的,所述三维激光雷达的线数为16,水平视场角为360°,垂直视场角为-15°至+15°,水平角分辨率为0.2°,垂直角分辨率为2°,测距范围为150m,测距精度为±2cm,盲区≤0.2m,所述三维激光雷达向计算平台发送数据的帧率为10hz/20hz。
12、综上所述,本申请包括以下有益技术效果:
13、本申请利用激光雷达点云数据的采集和目标建模技术、模式识别技术、模糊p id控制技术。设计一套集成激光雷达、i mu、数据采集与计算平台、平板电脑、运动控制器的导航装置,构成了自动控制闭环回路,实现了机器人在特征较少的隧道内沿某一边固定距离自动导航和对作业区域进行三维激光雷达建模。
技术特征:
1.一种机器人在隧道内的自动导航装置,机器人包括运动控制器,其特征在于,自动导航装置包括三维激光雷达和计算平台,所述三维激光雷达扫描隧道得到点云数据,所述计算平台根据点云数据提取出隧道两侧洞壁的直线拟合方程,所述计算平台根据设定好的导航配置参数以及机器人实时反馈的里程信息生成自动导航路线并计算出机器人行走速度和角速度,所述计算平台根据机器人行走速度和角速度得到机器人每个轮组的转速和转角,所述计算平台把每个轮组的转速和转角发给运动控制器;所述运动控制器根据轮组编码器获取轮组的位移作为里程信息发给计算平台。
2.根据权利要求1所述的机器人在隧道内的自动导航装置,其特征在于,自动导航装置还包括平板电脑,所述平板电脑和计算平台通信连接用于对机器人的导航状态进行显示,所述平板电脑用于操作人员与计算平台进行交互。
3.根据权利要求1所述的机器人在隧道内的自动导航装置,其特征在于,自动导航装置还包括惯性测量单元,所述惯性测量单元用于检测机器人的运动姿态,所述计算平台记录三维激光雷达点云数据、imu数据、里程信息,且所述计算平台在作业结束后对隧道内作业场景进行三维建模。
4.根据权利要求1所述的机器人在隧道内的自动导航装置,其特征在于,所述计算平台对采集到的三维雷达点云进行直通滤波,选取隧道两侧洞壁的点云;所述计算平台对直通滤波后的点云进行栅格处理,映射到一个水平面上;所述计算平台对栅格点云数据利用最小二乘法进行直线拟合,判断直线的拟合程度,得到洞壁的直线拟合方程。
5.根据权利要求1所述的机器人在隧道内的自动导航装置,其特征在于,所述计算平台根据洞壁的直线拟合方程实时计算激光雷达相对于洞壁的距离偏差δρ1和角度偏差δθ1,通过对激光雷达在机器人的安装位置和角度进行补偿,得到机器人运动中心相对于洞壁的距离偏差δρ2和角度偏差δθ2,通过pid控制算法,以距离偏差δρ2和角度偏差δθ2为输入参数,得到机器人的行走速度和角速度。
6.根据权利要求3所述的机器人在隧道内的自动导航装置,其特征在于,三维建模的步骤包括:
7.根据权利要求1所述的机器人在隧道内的自动导航装置,其特征在于,所述计算平台通过网口采集激光雷达点云数据,计算平台通过tcp/ip接口向运动控制器发送每个轮组的转速和转角。
8.根据权利要求1所述的机器人在隧道内的自动导航装置,其特征在于,所述三维激光雷达的线数为16,水平视场角为360°,垂直视场角为-15°至+15°,水平角分辨率为0.2°,垂直角分辨率为2°,测距范围为150m,测距精度为±2cm,盲区≤0.2m,所述三维激光雷达向计算平台发送数据的帧率为10hz/20hz。
技术总结
本申请提供了一种机器人在隧道内的自动导航装置,属于智能机器人作业技术领域,具体包括三维激光雷达和计算平台,所述三维激光雷达扫描隧道得到点云数据,所述计算平台根据点云数据提取出隧道两侧洞壁的直线拟合方程,所述计算平台根据设定好的导航配置参数以及机器人实时反馈的里程信息生成自动导航路线并计算出机器人行走速度和角速度,所述计算平台根据机器人行走速度和角速度得到机器人每个轮组的转速和转角,所述计算平台把每个轮组的转速和转角发给运动控制器;所述运动控制器根据轮组编码器获取轮组的位移作为里程信息发给计算平台。通过本申请的处理方案,在隧道场景中使作业机器人实现厘米级精度的自主导航。
技术研发人员:卢光旭,徐文菁,昝宝亮,张红洛
受保护的技术使用者:中国航空工业集团公司洛阳电光设备研究所
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!