一种适应高海况的北斗三号捕获跟踪方法与流程
本发明涉及电变量的测量,尤其涉及一种适应高海况的北斗三号捕获跟踪方法。
背景技术:
1、由于海洋受潮汐、风浪等因素影响,海面环境复杂多变,且海水对电磁波信号有很强的反射能力。在海洋这种特殊的环境下,船用北斗三号接收机接收到的卫星信号多径效应相比于陆地、航空等应用将更为复杂和恶劣,将会导致更大的伪距和载波相位误差。在五级、六级高海况条件下,大中型船舶在航行过程中,由海浪剧烈变化引起的船舶纵摇角度可达到15°、横摇角度可达到20°,在此情况下卫星信号的自适应稳定跟踪也是本方案需要考虑的另一个关键点,因此,为了保证高海况下船用北斗三号接收机稳定工作,需要进行适应高海况的北斗三号捕获跟踪技术研究。
技术实现思路
1、本发明所要解决的技术问题是提供一种适应高海况的北斗三号捕获跟踪方法,可以实现高海况下船用北斗三号接收机稳定工作,保证高海况北斗三号信号的稳定跟踪。
2、本发明是通过以下技术方案予以实现:
3、一种适应高海况的北斗三号捕获跟踪方法,其包括如下步骤:
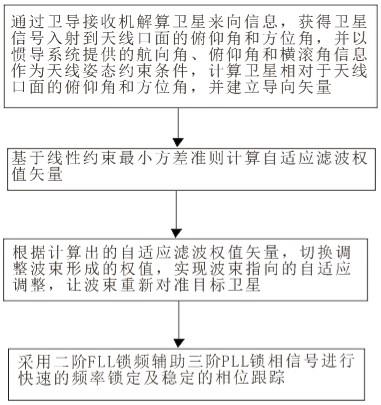
4、s1:通过卫导接收机解算卫星来向信息,获得卫星信号入射到天线口面的俯仰角和方位角,并以惯导系统提供的航向角、俯仰角和横滚角信息作为天线姿态约束条件,计算卫星相对于天线口面的俯仰角和方位角,并建立导向矢量;
5、s2:基于线性约束最小方差准则计算自适应滤波权值矢量;
6、s3:根据计算出的自适应滤波权值矢量,切换调整波束形成的权值,实现波束指向的自适应调整,让波束重新对准目标卫星;
7、s4:采用二阶fll锁频辅助三阶pll锁相信号进行快速的频率锁定及稳定的相位跟踪。
8、进一步,步骤s1中计算卫星相对于天线口面的俯仰角和方位角,并建立导向矢量包括如下步骤:
9、s11:先根据式(1)计算ecef地心坐标系下天线到卫星的方向余弦矢量:
10、(1);
11、其中:为通过卫导接收机解算提供的卫星来向信息获得的卫星信号入射到天线口面的俯仰角,为通过卫导接收机解算提供的卫星来向信息获得的卫星信号入射到天线口面的方位角;
12、s12:根据式(2)将ecef地心坐标系下天线到卫星的方向余弦矢量转换到neu站点坐标系中得到neu站点坐标系下天线到卫星的方向余弦矢量:
13、(2);
14、其中:r为ecef地心坐标系到neu站点坐标系的旋转矩阵;
15、s13:根据式(3)计算得到从neu站点坐标系到载体坐标系的旋转矩阵;
16、(3);
17、其中为惯导输出的俯仰角,为惯导输出的方位角,为惯导输出的横滚角;
18、s14:根据式(4)计算导向矢量:
19、(4);
20、其中:表示导向矢量在东向的分量,表示导向矢量在北向的分量,表示导向矢量在天向的分量。
21、进一步,步骤s2中基于线性约束最小方差准则计算自适应滤波权值矢量包括如下步骤:
22、s21.将下变频(ddc)信号分割为多个子频带,对多个子频带按照式(5)进行功率统计:
23、(5);
24、其中:为采样点数,n为统计点数,为统计周期内第个采样点的输入信号值,为每个子频带的平均功率;
25、s22.根据式(6)进行计算,在期望信号方向增益为固定值前提下使阵列输出信号功率最低:
26、(6);
27、其中:表示阵列输出的功率,表示形成波束的频域数据,是待求的权矢量,h表示矩阵的共轭转置,表示待求的权矢量的共轭转置,表示输出功率最小时待求的权矢量,是期望信号的空域导向矢量;
28、s23.对式(6)构造拉格朗日函数为式(7),并对式(7)求导得到式(8),根据式(8)得到自适应滤波权值矢量:
29、(7);
30、(8);
31、其中:为拉格朗日系数,表示线性约束的代价,表示输入信号协方差矩阵,,为自适应滤波权值矢量,表示采样时刻,表示快拍数。
32、进一步,步骤s3中采用联合通道载噪比自适应姿态切换技术来调整波束形成的权值,具体包括如下步骤:
33、s31:根据式(9)计算主路波束指向信号:
34、(9);
35、其中:为波束合成方向矢量,表示波束合成方向矢量的共轭转置,为信道均衡后的数字基带信号,,表示同相支路的信号分量,表示正交支路的信号分量;
36、s32:通过式(10)计算从路信号:
37、(10);
38、其中:为从路信号,为阻塞矩阵;
39、s33:主路波束指向信号和从路信号构成自适应姿态切换抗干扰输入数据,接收机计算信号载噪比,反馈至抗干扰算法模块,对阵列天线波束快速调整,让波束对准目标卫星,维持卫星信号的稳定跟踪。
40、进一步,步骤s4采用二阶fll锁频辅助三阶pll锁相信号进行快速的频率锁定及稳定的相位跟踪时步骤如下:
41、s41:锁频环路fll中鉴频器测量载波相位在固定时间间隔内的变化量,经环路滤波器滤波后,通过式(11)进行鉴频计算,得到锁频环路的输出,进行快速的频率锁定:
42、(11);
43、其中:t为锁频环相干积分时间,表示包含相邻两时cross刻载波相位差变化量信息的点积,,表示包含相邻两时刻载波相位差变化量信息的叉积,,表示同相支路相关器的输出,表示正交支路相关器的输出;
44、s42:输入信号与载波数字振荡器输出的两路正交信号进行数字混频,经低通滤波后送入鉴相器,提取相位误差信息,经环路滤波后作为数字振荡器的控制输入,按照式(12)计算出锁相环的输出,进行快速的相位锁定:
45、(12)。
46、发明的有益效果:
47、本发明针对高海况条件下的船用北斗三号接收机应用需求,通过计算卫星相对于天线口面的俯仰角和方位角,并建立导向矢量,然后再基于线性约束最小方差准则计算自适应滤波权值矢量,再根据计算出的自适应滤波权值矢量,切换调整波束形成的权值,实现波束指向的自适应调整,让波束始终对准目标卫星,然后再对频率和相位进行快速锁定,从而实现高海况下船用北斗三号接收机稳定工作,保证高海况北斗三号信号的稳定跟踪。
技术特征:
1.一种适应高海况的北斗三号捕获跟踪方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种适应高海况的北斗三号捕获跟踪方法,其特征在于,步骤s1中计算卫星相对于天线口面的俯仰角和方位角,并建立导向矢量包括如下步骤:
3.根据权利要求1所述的一种适应高海况的北斗三号捕获跟踪方法,其特征在于,步骤s2中基于线性约束最小方差准则计算自适应滤波权值矢量包括如下步骤:
4.根据权利要求1所述的一种适应高海况的北斗三号捕获跟踪方法,其特征在于,步骤s3中采用联合通道载噪比自适应姿态切换技术来调整波束形成的权值,具体包括如下步骤:
5.根据权利要求1所述的一种适应高海况的北斗三号捕获跟踪方法,其特征在于,步骤s4采用二阶fll锁频辅助三阶pll锁相信号进行快速的频率锁定及稳定的相位跟踪时步骤如下:
技术总结
本发明涉及电变量的测量技术领域,尤其涉及一种适应高海况的北斗三号捕获跟踪方法,包括如下步骤:获得卫星信号入射到天线口面的俯仰角和方位角信息,再以惯导提供的航向角、俯仰角和横滚角作为天线姿态约束条件,计算卫星相对于天线口面的俯仰角和方位角,并建立导向矢量;基于线性约束最小方差准则计算自适应滤波权值矢量;根据自适应滤波权值矢量切换调整波束形成的权值,实现波束指向的自适应调整,让波束重新对准目标卫星;采用二阶FLL锁频辅助三阶PLL锁相信号进行快速的频率锁定及稳定的相位跟踪。本发明提供的方法可以实现高海况下船用北斗三号接收机稳定工作,保证高海况北斗三号信号的稳定跟踪。
技术研发人员:马若顺,王健聪,路寅,王晓川
受保护的技术使用者:中国船舶集团有限公司第七〇七研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!