一种基于矩形识别的集群机器人位置感知系统及方法
本发明属于机器人领域,具体涉及一种基于矩形识别的集群机器人位置感知系统及方法。
背景技术:
1、机器人技术是人工智能领域的一个重要分支,它的不断发展已经深刻地塑造了我们生活的各个层面。其中,面对复杂任务时使用多机器人协同工作是一种提高效率的有效途径。然而当机器人规模较大时,传统的中心控制方法容错能力较低且不易维护。集群机器人的出现为解决上述问题提供了可行方案。
2、集群机器人旨在通过个体间简单的交互规则,使由大量简单机器人组成的系统涌现出复杂的集群行为。随着对群体机器人自组织运动控制算法的深入研究,集群机器人的验证成为工程应用的关键一环。为了更加贴近工程实际,在进行集群算法验证实验时,机器人应具备独立感知周围个体的能力。然而,许多机器人系统采用伪分布式控制的方式,即先获取全局信息,然后将全局信息按需处理为算法所需的局部信息。
3、集群机器人系统要求机器人构造简单且成本低廉。因此,这些机器人通常不配备高成本和高功率的定位设备。为了更好地满足算法的实际需求,需要以简单低成本的方式构建分布式的集群机器人感知系统。
技术实现思路
1、本发明所要解决的技术问题是:
2、针对桌面集群机器人不易获取全局感知信息的瓶颈问题,本发明设计了一种基于矩形识别的集群机器人位置感知系统及方法。依靠视觉传感器模块和灯光标志模块,机器人快速识别出矩形亮块标志物,通过矩形计算出邻居个体与自身的相对位置,用于集群算法运算。
3、为了解决上述技术问题,本发明采用的技术方案为:
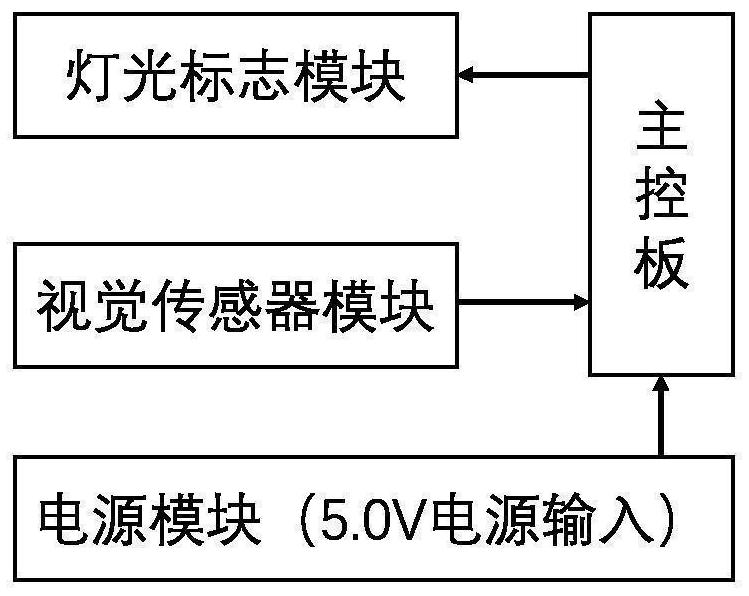
4、一种基于矩形识别的集群机器人位置感知系统,其特征在于该系统设置在机器人顶部,包括灯光标志模块、视觉传感器模块、主控板和电源模块,
5、所述灯光标志模块,用于产生一个矩形亮块,作为邻居个体识别标志;
6、所述视觉传感器模块,用于采集个体周围全向视野的图像信息传递给主控板进行计算分析;
7、所述主控板,连接灯光标志模块和视觉传感器模块,用于处理视觉传感器采集到的图像,计算邻居机器人的相对距离和角度并将处理后的结果储存到其存储单元中,可供集群算法程序调用;
8、所述电源模块,用于给主控板供电。
9、本发明进一步的技术方案:所述灯光编码模块包括圆柱形灯罩、三条led灯带和等边三角形木条组成;三条led灯带分别固定在等边三角形木条三个侧面上;圆柱形灯罩由磨砂亚克力管制成,灯罩上下两端设有黑色不透光条状部分。
10、本发明进一步的技术方案:所述视觉传感器模块由三个摄像头组成,三个摄像头分别朝向多个方向用以获得个体周围全向视野。
11、本发明进一步的技术方案:所述主控板raspberry pi 4b,可支持自身控制程序调用或与其它终端在局域网内进行传输。
12、一种基于矩形识别的集群机器人位置感知方法,其特征在于,包括:
13、s1:将获取的多幅图像进行灰度化处理,生成灰度图像;对灰度图像进行高斯滤波形成灰度直方图,根据灰度直方图设定阈值,对灰度图像做二值化处理;
14、s2:对二值化图像进行腐蚀和膨胀处理;
15、s3:对腐蚀和膨胀处理后的图像中的亮块按大小进行筛选,去除过小亮块;
16、s4:获取图像中每个亮块的最小内接矩形的中心坐标和矩形像素高度,用图像中邻居机器人产生的矩形亮块中心点的连线中点的横坐标作为邻居机器人在对应图像中的位置;
17、s5:通过横坐标计算邻居机器人的相对角度;
18、s6:通过图像中矩形亮块的像素高度计算邻居机器人的相对距离。
19、本发明进一步的技术方案:还包括筛除多幅图像中重复计算的机器人。
20、本发明进一步的技术方案:所述的筛选具体为去除像素点少于200个的亮块。
21、本发明进一步的技术方案:通过横坐标计算邻居机器人的相对角度具体为:
22、
23、其中,m*n为图像分辨率,x为矩形亮块中心点的连线中点的横坐标,摄像头的视野角度为α~β,如果β-α为负值,上述公式需要对360°取余。
24、本发明进一步的技术方案:通过图像中矩形亮块的高度计算邻居机器人的相对距离具体为:
25、
26、其中,h0为摄像机标定时摄像机采集图像上邻居机器人的矩形亮块像素高度,d0为摄像机标定时机器人与邻居机器人距离,h为邻居机器人在采集图像上的矩形亮块像素高度。
27、本发明进一步的技术方案:使用一个基于apache2.0许可发行的跨平台计算机视觉和机器学习软件库opencv进行处理。
28、本发明的有益效果在于:
29、本发明提出的一种基于矩形识别的集群机器人位置感知系统及方法,仅需机器人搭载廉价摄像头模块和简单灯光标志模块,便可以获取周围邻居的位置信息。从周围任一方向观察同一个灯光标志模块呈现的图像形状都是一致的,不存在方向差异,减小了识别干扰,有利于分布式集群机器人的相互识别。利用矩形中心点横坐标计算相对角度,方便快捷,不易受到干扰,且便于筛除多个视觉传感器中的重复个体。通过矩形高度来计算相对距离,计算过程简单,有利于降低主控板的计算耗时,提高机器人的响应速度和降低集群算法每一步的运行时间,使分布式集群机器人更贴近集群算法对实时性的需求。
技术特征:
1.一种基于矩形识别的集群机器人位置感知系统,其特征在于该系统设置在机器人顶部,包括灯光标志模块、视觉传感器模块、主控板和电源模块,
2.根据权利要求1所述的一种基于矩形识别的集群机器人位置感知系统,其特征在于,所述灯光编码模块包括圆柱形灯罩、三条led灯带和等边三角形木条组成;三条led灯带分别固定在等边三角形木条三个侧面上;圆柱形灯罩由磨砂亚克力管制成,灯罩上下两端设有黑色不透光条状部分。
3.根据权利要求1所述的一种基于矩形识别的集群机器人位置感知系统,其特征在于,所述视觉传感器模块由三个摄像头组成,三个摄像头分别朝向多个方向用以获得个体周围全向视野。
4.根据权利要求1所述的一种基于矩形识别的集群机器人位置感知系统,其特征在于,所述主控板raspberry pi 4b,可支持自身控制程序调用或与其它终端在局域网内进行传输。
5.一种基于矩形识别的集群机器人位置感知方法,其特征在于,包括:
6.根据权利要求5所述的一种基于矩形识别的集群机器人位置感知方法,其特征在于,还包括筛除多幅图像中重复计算的机器人。
7.根据权利要求5所述的一种基于矩形识别的集群机器人位置感知方法,其特征在于,所述的筛选具体为去除像素点少于200个的亮块。
8.根据权利要求5所述的一种基于矩形识别的集群机器人位置感知方法,其特征在于,通过横坐标计算邻居机器人的相对角度具体为:
9.根据权利要求5所述的一种基于矩形识别的集群机器人位置感知方法,其特征在于,通过图像中矩形亮块的高度计算邻居机器人的相对距离具体为:
10.根据权利要求5所述的一种基于矩形识别的集群机器人位置感知方法,其特征在于,使用一个基于apache2.0许可发行的跨平台计算机视觉和机器学习软件库opencv进行处理。
技术总结
本发明涉及一种基于矩形识别的集群机器人位置感知系统及方法,属于机器人领域。系统包括灯光标志模块、视觉传感器模块、主控板,主控板连接灯光编码模块和视觉传感器模块。方法包括主控板处理视觉传感器采集到的图像,用于处理视觉传感器采集到的图像,计算邻居机器人的相对距离和角度并将处理后的结果储存到其存储单元中,可供集群算法程序调用,同时主控板控制给灯光标志模块供电。本发明仅需机器人搭载廉价摄像头模块和简单灯光标志模块,便可以获取周围邻居的位置信息。
技术研发人员:彭星光,陶源,宋保维,潘光,李乐,张福斌,高剑,梁庆卫,张克涵
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!