一种基于深度学习的光学镜片装调位姿误差辨识方法
本发明涉及反射式光学镜片装配,尤其涉及一种基于深度学习的光学镜片装调位姿误差辨识方法。
背景技术:
1、反射式光学系统具有口径大、分辨率高、焦距长等的特点,在空间遥感、光学望远镜等领域应用广泛。反射式镜片是光学系统成像的核心,镜片的倾斜、偏心和间隔误差会引起不必要的像差,进而影响光学系统的成像质量。因此,在镜片的装调阶段需要保证镜片能正确地调整移动到设计位置。
2、目前,反射式光学镜片主要以定心仪、激光激光干涉仪等作为装调辅助设备,多次并分别检测镜片的倾斜、偏心和间隔,采用定性方法完成镜片的装调。zl 202211468918.x采用激光激光干涉仪进行红外波段光学系统的次镜和目镜的装调,该研究根据激光激光干涉仪测量的像差类型和数据作为镜片的定性调整依据。zl 202111055405.1采用定心仪保证镜片的光轴垂直度,并根据泽尼克多项式拟合激光干涉仪检测的同轴四反系统的波前数据组,在处理模块中获得镜片的偏心和间隔失调数据。zl 202111597887.3利用百分表完成望远镜透镜组的粗调,利用定心仪完成镜组的精调,分多次测量待装调镜组的倾斜、偏心和间隔。zl 202111050753.x提出针对离轴两反光学系统的装调装置,并以经纬仪和激光干涉仪辅助手动或定性装调。zl 202110637363.6提出了基于点扩散函数的望远镜装调方法,通过采集多个视场的点扩散函数并通过图像处理的方法获得30项泽尼克椭率、半峰全宽和偏向角系数,输入到神经网络模型辅助装调,其输入和模型都较为复杂。
3、因此,现有关于反射式光学镜片的高精密自动装调方法的研究仍然存在一些不足和空白:
4、1.未定量描述镜片实际位姿与理想装调位姿之间的偏差。镜片装调以人工反复试错的方式进行,导致装调过程自动化程度低、人工参与程度高、装调周期长、装调精度受主观因素影响大等问题。
5、2.未能通过一次检测过程调整镜片五自由度的位姿。镜片的倾斜、偏心、间隔误差常采用多种检测装置、多种检测方法测量,采取多道工序的形式完成装调,导致镜片装调方法复杂、装调装置冗杂。
6、3.装调辅助模型复杂且不适用于激光干涉仪装调。现有方法在信息采集后需进行二次处理,且输入数据量较大,模型复杂程度较高。此外,作为常用装调辅助装置的干涉仪无法测量现有方法所需的输入参数,现有方法不适用于光学系统的干涉仪辅助装调。
技术实现思路
1、有鉴于此,本发明提供了一种基于深度学习的光学镜片装调位姿误差辨识方法,能够有效利用干涉仪完成反射式光学镜片的装调过程,解决镜片装调过程中对位姿误差的定量描述问题和对五个方向位姿误差的一次性辨识问题,为提高反射式光学镜片的装调效率和装调自动化程度提供技术基础。
2、一种基于深度学习的光学镜片装调位姿误差辨识方法,其特征在于,包括以下步骤:
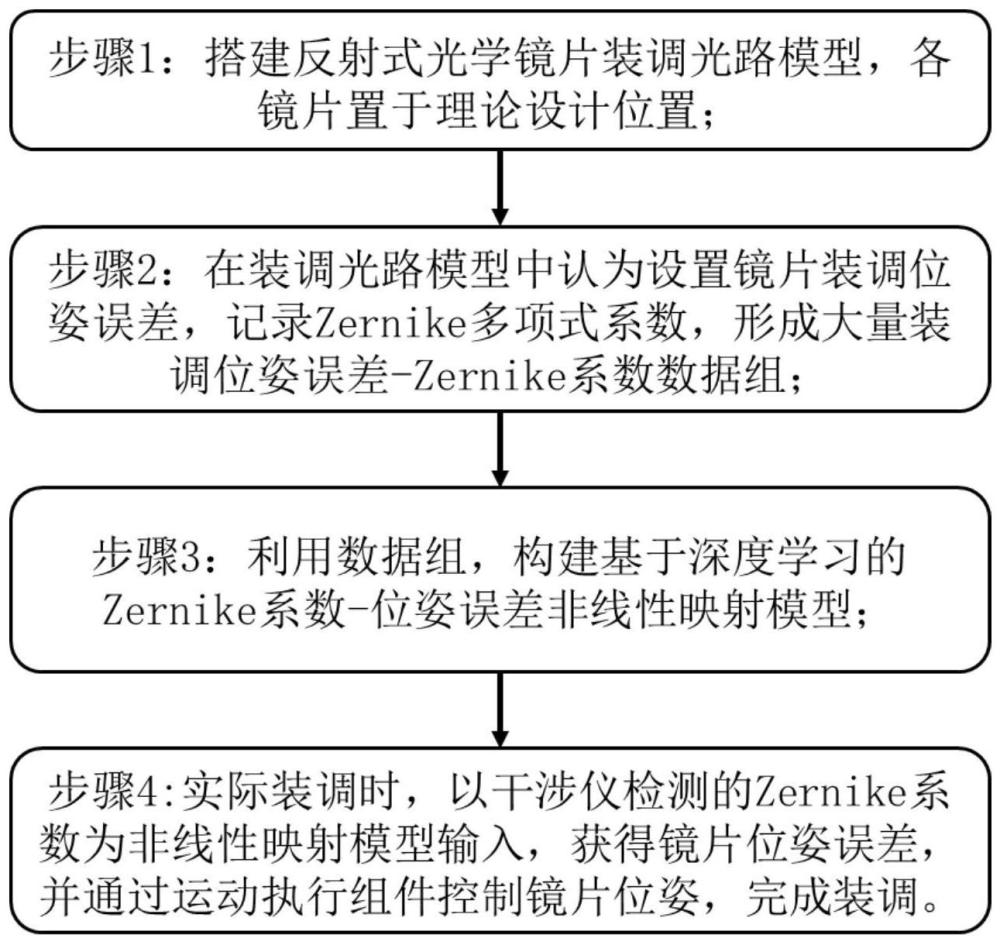
3、步骤1、根据待装调光学镜片,构建镜片装调光路模型,将待装调镜片放置在理论设计位置;
4、步骤2、在装调光路模型中人为设置镜片装调位姿误差,采用zernike多项式拟合像面处的波像差,并记录相应的zernike多项式系数,形成大量的装调位姿误差-zernike系数数据组;
5、步骤3、将数据组中的zernike系数作为深度学习模型的输入,装调位姿误差作为输出,构建基于深度学习的非线性映射模型,并进行深度学习模型的参数优化;
6、步骤4、构建光学镜片实际装调模型,以激光干涉仪检测的zernike系数为非线性映射模型的输入,获得光学镜片的装调位姿误差,通过运动执行组件控制镜片的移动量,完成光学镜片的装调。
7、进一步地,所述步骤1中的镜片装调光路模型可为仿真模型。
8、进一步地,所述步骤2中的人为设置镜片装调位姿误差,包括除绕镜片光轴旋转位姿误差外的五个自由度的位姿误差。
9、进一步地,所述步骤2中的记录相应的zernike多项式系数为前9项的系数。
10、进一步地,所述步骤3中的深度学习模型包括神经网络、支持向量机、随机森林等深度学习模型。
11、进一步地,所述位姿误差辨识方法适用于单片及多片反射镜的装调,顺序装调中,后装镜片以前装镜片为装调基准。
12、进一步地,所述实际装调模型包括激光干涉仪、光学镜片、低应力夹持装置、运动执行组件、装调辅助反射镜等。
13、进一步地,所述光学镜片通过低应力夹持装置固定在运动执行组件上。
14、进一步地,所述运动执行组件能调整待装配光学镜片除绕镜片光轴旋转位姿误差外的五个自由度的位姿误差。
15、有益效果:
16、1、本发明提出的基于深度学习的装调位姿误差辨识方法,能实现对位姿误差的定量描述,能消除现存传统手工定性装调的弊端,提高装调过程的自动化程度、装调效率、装调一致性等。
17、2、本发明提出的基于深度学习的装调位姿误差辨识方法,能在一次干涉检测过程中实现对镜片五个自由度失调位姿的辨识。反射式光学镜片的装调过程中,不需要采用多种检测仪器、多道装调工序,将激光干涉仪检测的zernike数据作为深度学习模型的输入,即可实现镜片倾斜、偏心和间隔的一次性辨识。
18、3、本发明提出的基于深度学习的装调位姿误差辨识方法,构建的非线性映射模型输入和结构精练,且适用于常用的光学系统装调辅助装置激光干涉仪。
技术特征:
1.一种基于深度学习的光学镜片装调位姿误差辨识方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种基于深度学习的光学镜片装调位姿误差辨识方法,其特征在于,所述步骤1中的镜片装调光路模型可为仿真模型。
3.如权利要求1所述的一种基于深度学习的光学镜片装调位姿误差辨识方法,其特征在于,所述步骤2中的人为设置镜片装调位姿误差,包括除绕镜片光轴旋转位姿误差外的五个自由度的位姿误差。
4.如权利要求1所述的一种基于深度学习的光学镜片装调位姿误差辨识方法,其特征在于,所述步骤2中的记录相应的zernike多项式系数为前9项的系数。
5.如权利要求1所述的一种基于深度学习的光学镜片装调位姿误差辨识方法,其特征在于,所述步骤3中的深度学习模型包括神经网络、支持向量机、随机森林等深度学习模型。
6.如权利要求1所述的一种基于深度学习的光学镜片装调位姿误差辨识方法,其特征在于,所述位姿误差辨识方法适用于单片及多片反射镜的装调,顺序装调中,后装镜片以前装镜片为装调基准。
7.如权利要求1所述的一种基于深度学习的光学镜片装调位姿误差辨识方法,其特征在于,所述实际装调模型包括激光干涉仪、光学镜片、低应力夹持装置、运动执行组件等。
8.如权利要求7所述的一种基于深度学习的光学镜片装调位姿误差辨识方法,其特征在于,所述光学镜片通过低应力夹持装置固定在运动执行组件上。
9.如权利要求7所述的一种基于深度学习的光学镜片装调位姿误差辨识方法,其特征在于,所述运动执行组件能调整待装配光学镜片除绕镜片光轴旋转位姿误差外的五个自由度的位姿误差。
技术总结
本发明公开了一种基于深度学习的光学镜片装调位姿误差辨识方法,属于反射式光学镜片装配技术领域。本发明的位姿误差辨识方法步骤为:1、构建镜片装调光路模型,将待装调镜片放置在理论设计位置;2、设置镜片装调位姿误差并进行波像差Zernike分析,获得大量的装调位姿误差‑Zernike系数数据组;3、基于深度学习方法,构建Zernike系数与装调位姿误差的非线性预测模型;4、实际装调时利用激光干涉仪检测Zernike系数,通过调用深度学习模型进行位姿误差预测,并通过运动执行组件控制镜片位姿,完成装调。本发明实现了对五个自由度位姿误差的定量表征和一次性预测,有益于提高反射式镜片装调效率。
技术研发人员:李朝将,刘德飘,金鑫,张之敬,邹东颐,谢翔之,朱荣全
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!